速度环预测控制:基于自抗扰控制的预测函数控制 - PMSM
速度环预测控制:基于自抗扰控制的预测函数控制-pmsm,基于自抗扰补偿负载扰动预测函数控制 (Predictive function control,简称PFC)是第三代模型预测控制算法,它是由 Richalet 和 Kuntze 等人在 80年代中后期提出,并成功地应用于工业机器人的快速高精度控制。预测函数控制在保持模型预测控制的优点的同时,使所产生的控制输入更具规律性,并且可有效减少算法计算量
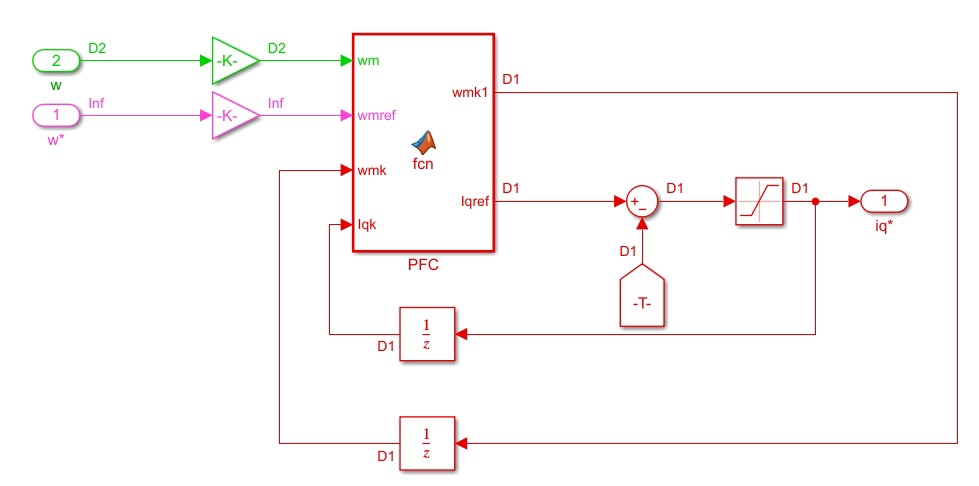
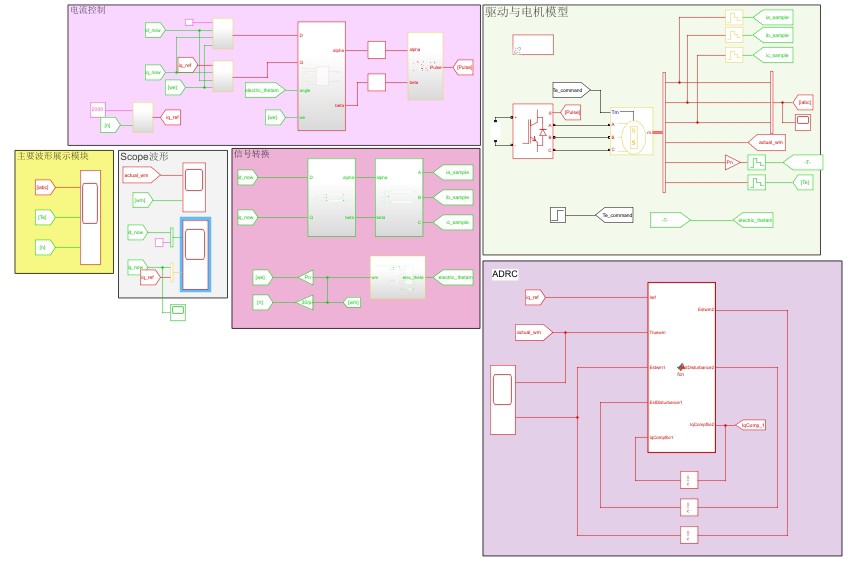
速度环预测控制:基于自抗扰控制的预测函数控制-pmsm,基于自抗扰补偿负载扰动预测函数控制 (Predictive function control,简称PFC)是第三代模型预测控制算法,它是由 Richalet 和 Kuntze 等人在 80年代中后期提出,并成功地应用于工业机器人的快速高精度控制。 预测函数控制在保持模型预测控制的优点的同时,使所产生的控制输入更具规律性,并且可有效减少算法计算量,从而能适应一类快速响应受控对象对控制算法的快速要求。 PFC 把控制输入的结构视为关键问题, 可以克服其他模型预测控制可能出现规律不明的控制输入问题, 同时具有良好的跟踪能力及较强的鲁棒性。 包含: (1)1.5延时补偿 (2)全电压前馈补偿 (2)ESO
在电机控制领域,对于永磁同步电机(PMSM)的精准控制一直是研究热点。今天咱们就来聊聊基于自抗扰补偿负载扰动的预测函数控制(Predictive function control,PFC),这可是第三代模型预测控制算法呢,由Richalet和Kuntze等人在80年代中后期提出,并且在工业机器人的快速高精度控制上取得了成功应用。
PFC的独特魅力
PFC在继承模型预测控制优点的同时,有着自己的闪光点。它把控制输入的结构当作关键问题来处理,这样一来,就能够克服其他模型预测控制可能出现的控制输入规律不明的问题。而且,它让产生的控制输入更具规律性,还能有效减少算法计算量,对于那些需要快速响应的受控对象来说,简直是量身定制,能很好地满足它们对控制算法快速性的要求,同时具备良好的跟踪能力和较强的鲁棒性。
关键技术解析
1.5延时补偿
在实际系统中,延时是不可避免的问题,它会影响系统的性能。1.5延时补偿就是为了解决这个问题。假设我们有一个简单的系统模型,在代码实现上,我们可以这样处理:
# 假设这里有一个代表系统输出的变量y
# 和一个代表控制输入的变量u
# 延时补偿相关参数
delay = 1.5
# 模拟延时补偿计算
y_with_delay = y[-int(delay):]
# 这里简单假设y是一个列表,取列表中对应延时部分的数据
# 实际应用中可能需要更复杂的处理来考虑系统动态
u_compensated = calculate_control_input(y_with_delay)
# 根据延时后的输出计算补偿后的控制输入通过这样的延时补偿,我们能让系统对延时有更好的适应性,提升控制的准确性。
全电压前馈补偿
全电压前馈补偿也是提升PFC性能的重要一环。它的原理是根据系统的电压信息,提前对控制输入进行调整。以下是一段简单的模拟代码:
# 假设获取到系统电压信息
voltage = get_system_voltage()
# 定义电压前馈补偿系数
feed_forward_coefficient = 0.5
# 计算全电压前馈补偿量
voltage_feed_forward = voltage * feed_forward_coefficient
# 假设这里有一个原始控制输入u_original
u_with_feed_forward = u_original + voltage_feed_forward
# 将补偿量加到原始控制输入上通过全电压前馈补偿,系统能够更快地响应电压变化,减少因电压波动带来的控制误差。
ESO(扩张状态观测器)
ESO在基于自抗扰控制的PFC中扮演着关键角色。它能够实时观测系统中的不确定因素,包括负载扰动等,并进行补偿。下面是一个简单的ESO原理代码框架:
class ESO:
def __init__(self, beta01, beta02, beta03, b0):
self.beta01 = beta01
self.beta02 = beta02
self.beta03 = beta03
self.b0 = b0
self.x1 = 0
self.x2 = 0
self.x3 = 0
def update(self, y, u):
e = self.x1 - y
self.x1 = self.x1 - self.beta01 * e
self.x2 = self.x2 - self.beta02 * e - self.x3 + self.b0 * u
self.x3 = self.x3 - self.beta03 * e
return self.x3在实际应用中,我们可以通过调整ESO的参数(如beta01、beta02、beta03、b0)来更好地观测和补偿系统的不确定因素,提高系统的抗干扰能力。
速度环预测控制:基于自抗扰控制的预测函数控制-pmsm,基于自抗扰补偿负载扰动预测函数控制 (Predictive function control,简称PFC)是第三代模型预测控制算法,它是由 Richalet 和 Kuntze 等人在 80年代中后期提出,并成功地应用于工业机器人的快速高精度控制。 预测函数控制在保持模型预测控制的优点的同时,使所产生的控制输入更具规律性,并且可有效减少算法计算量,从而能适应一类快速响应受控对象对控制算法的快速要求。 PFC 把控制输入的结构视为关键问题, 可以克服其他模型预测控制可能出现规律不明的控制输入问题, 同时具有良好的跟踪能力及较强的鲁棒性。 包含: (1)1.5延时补偿 (2)全电压前馈补偿 (2)ESO
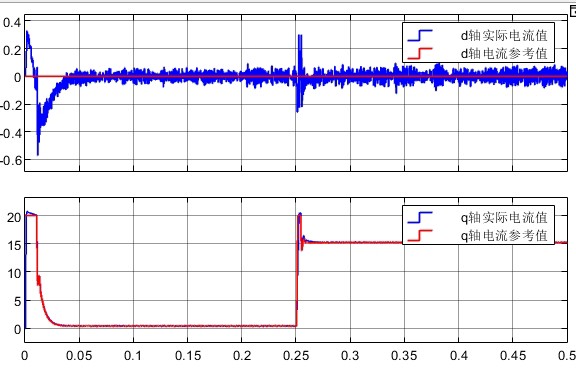
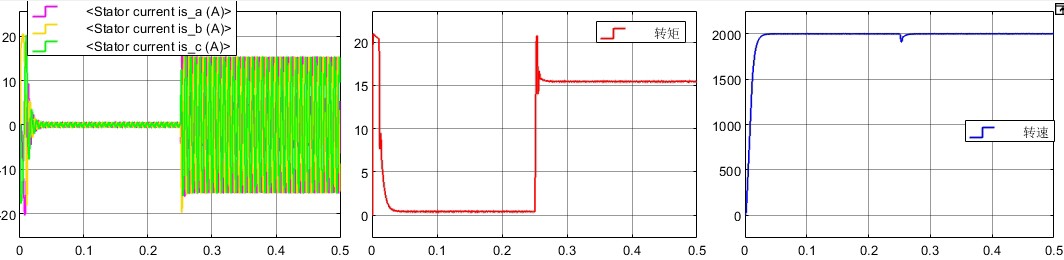
基于自抗扰控制的预测函数控制在PMSM控制中展现出了强大的性能,通过1.5延时补偿、全电压前馈补偿以及ESO等技术的协同作用,能够实现对PMSM的高精度、快速响应控制。希望今天的分享能让大家对这个有趣的控制算法有更深入的了解。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐

 20
20 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)