探索多无人机、移动机器人全覆盖与协同路径规划
/ 自定义地图示例// true 表示障碍物,false 表示可通行这样我们就简单定义了一个 5x5 的地图,其中true标识的地方就是障碍物,机器人不能通过。我们在地图设置时就已经通过true和false来标识障碍物了。在实际应用中,可能会根据传感器数据实时更新这个地图,比如检测到新的障碍物就把对应位置设为true。
多无人机 移动机器人 扫地机器人 全覆盖路径规划 多无人机 移动机器人协同路径规划 multi uav robot coverage path planning,cpp,mcpp algorithm基于 A 星算法的路径规划方法,地图可自定义设置,障碍物也可自定义设置,算法适合二次开发使用
在智能机器人领域,路径规划一直是关键技术,尤其是多无人机、移动机器人以及扫地机器人这类常见设备的全覆盖路径规划,更是备受关注。今天咱们就来唠唠基于 A 星算法的相关路径规划方法,以及围绕它展开的一些有意思的内容。
A 星算法的基础
A 星算法是一种在图形平面上,有多个节点的路径,求出最低通过成本的算法。它综合考虑了从起点到当前点的实际代价 g(n),以及从当前点到终点的预估代价 h(n),通过公式 f(n) = g(n) + h(n) 来评估每个节点的优先级,优先拓展 f(n) 值最小的节点。
简单代码示例(以 C++ 为例)
#include <iostream>
#include <vector>
#include <queue>
#include <cmath>
// 定义节点结构体
struct Node {
int x;
int y;
double g;
double h;
double f;
Node* parent;
Node(int _x, int _y) : x(_x), y(_y), g(0), h(0), f(0), parent(nullptr) {}
};
// 计算启发式函数 h(n)
double heuristic(Node* current, Node* goal) {
return std::sqrt(std::pow(current->x - goal->x, 2) + std::pow(current->y - goal->y, 2));
}
// A 星算法核心部分
std::vector<Node*> aStarSearch(std::vector<std::vector<bool>>& map, Node* start, Node* goal) {
std::priority_queue<Node*, std::vector<Node*>,
[](Node* a, Node* b) { return a->f > b->f; }> openList;
std::vector<std::vector<bool>> closedList(map.size(), std::vector<bool>(map[0].size(), false));
openList.push(start);
while (!openList.empty()) {
Node* current = openList.top();
openList.pop();
if (current->x == goal->x && current->y == goal->y) {
std::vector<Node*> path;
while (current!= nullptr) {
path.push_back(current);
current = current->parent;
}
return path;
}
closedList[current->x][current->y] = true;
// 检查相邻节点
for (int i = -1; i <= 1; ++i) {
for (int j = -1; j <= 1; ++j) {
if (i == 0 && j == 0) continue;
int newX = current->x + i;
int newY = current->y + j;
if (newX >= 0 && newX < map.size() && newY >= 0 && newY < map[0].size() &&!map[newX][newY] &&!closedList[newX][newY]) {
Node* neighbor = new Node(newX, newY);
neighbor->g = current->g + 1;
neighbor->h = heuristic(neighbor, goal);
neighbor->f = neighbor->g + neighbor->h;
neighbor->parent = current;
openList.push(neighbor);
}
}
}
}
return std::vector<Node*>();
}在这段代码里,Node 结构体定义了节点的位置 (x, y) 以及相关的 g、h、f 值和父节点指针。heuristic 函数就是用来计算 h(n) 的,这里简单采用了欧几里得距离。aStarSearch 函数则是 A 星算法的主体,通过优先队列 openList 来存储待探索的节点,不断取出 f 值最小的节点进行拓展,检查相邻节点并更新它们的 g、h、f 值,最后找到路径就返回路径节点列表。
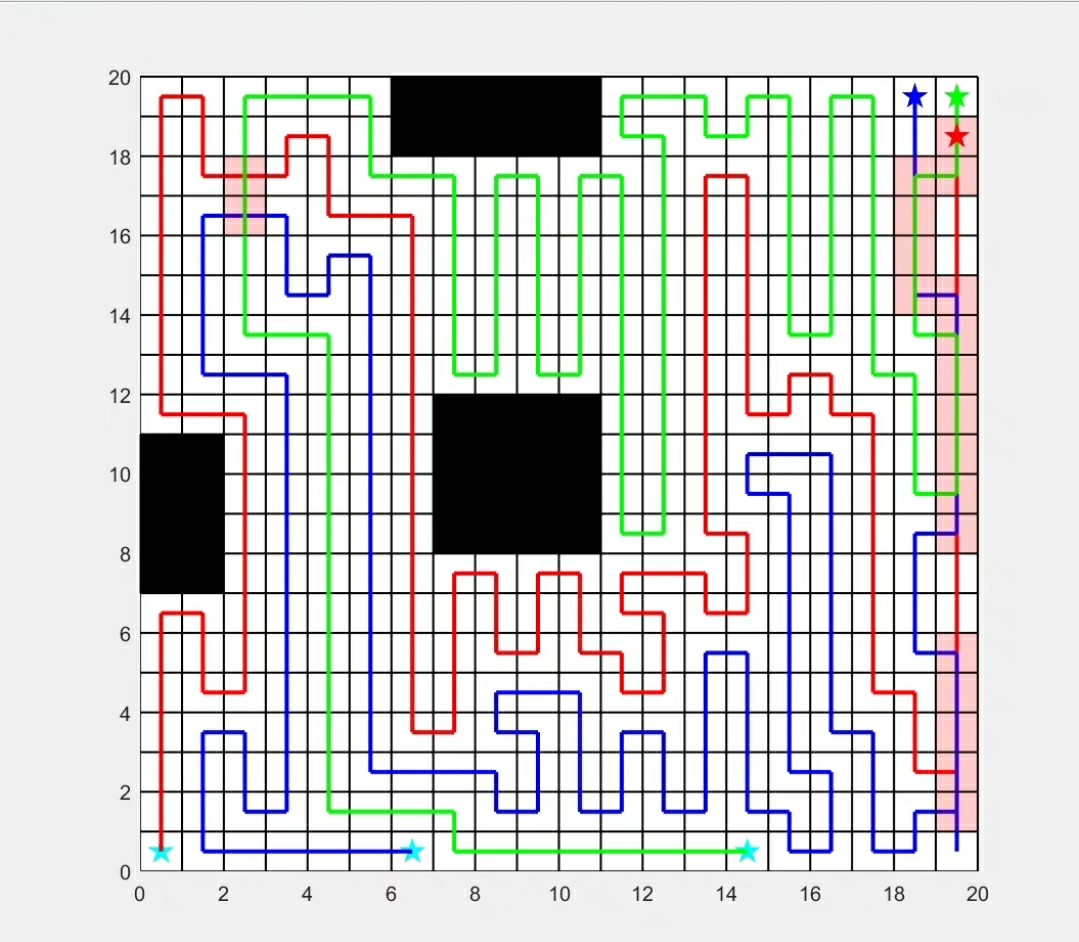
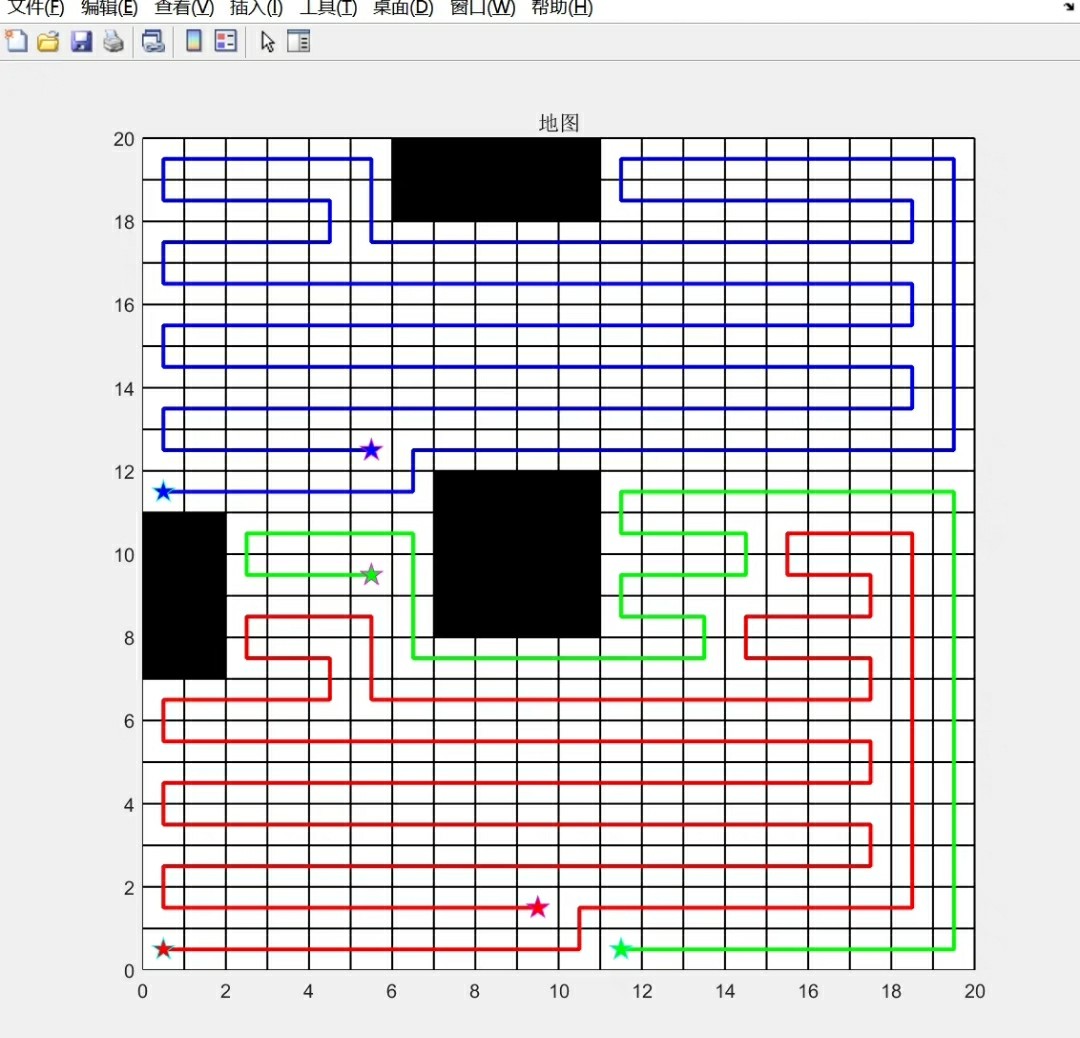
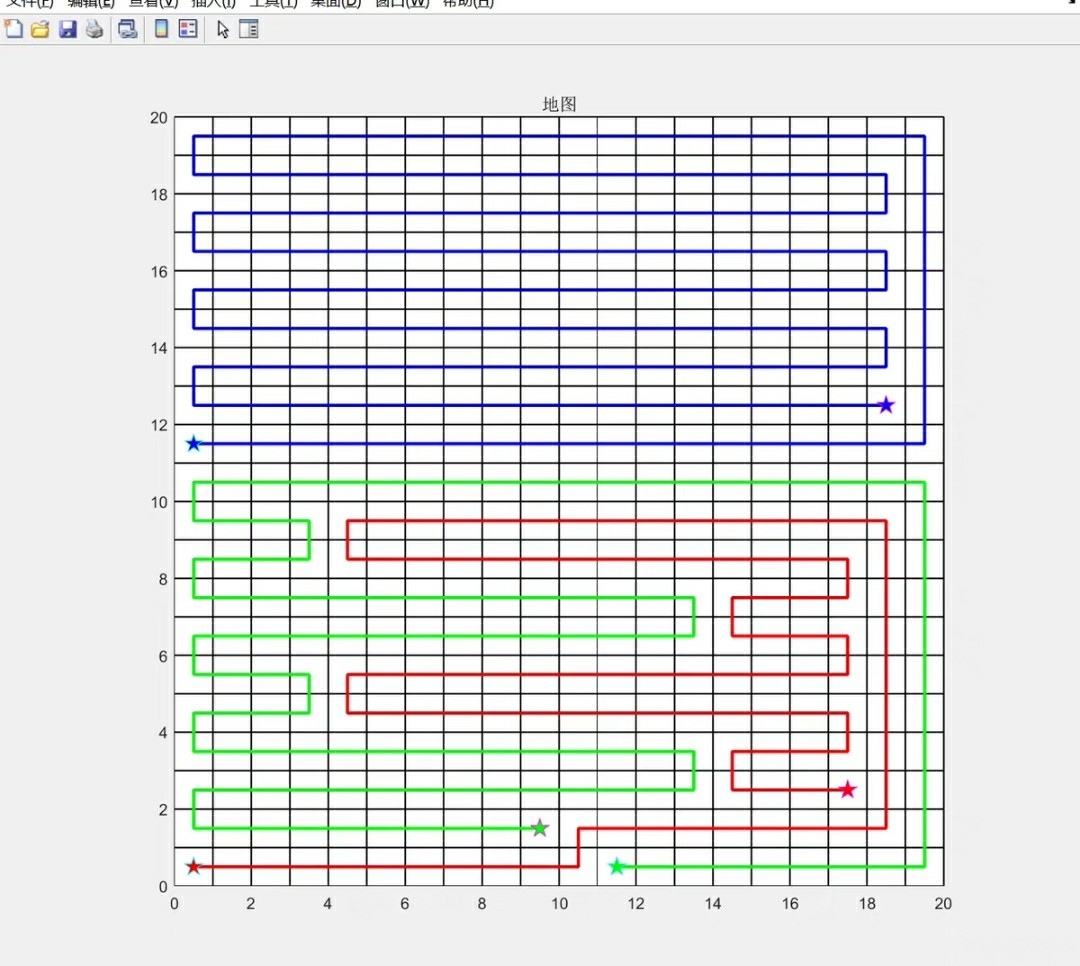
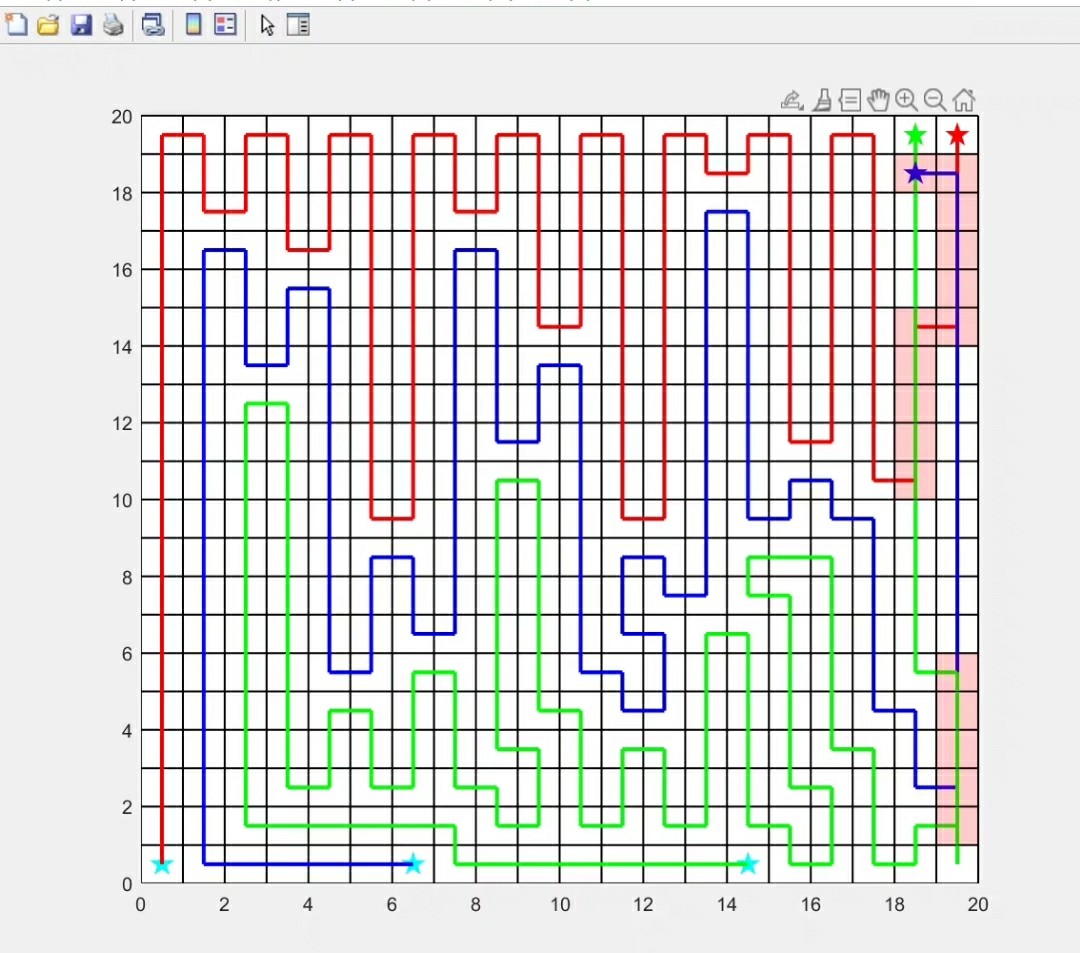
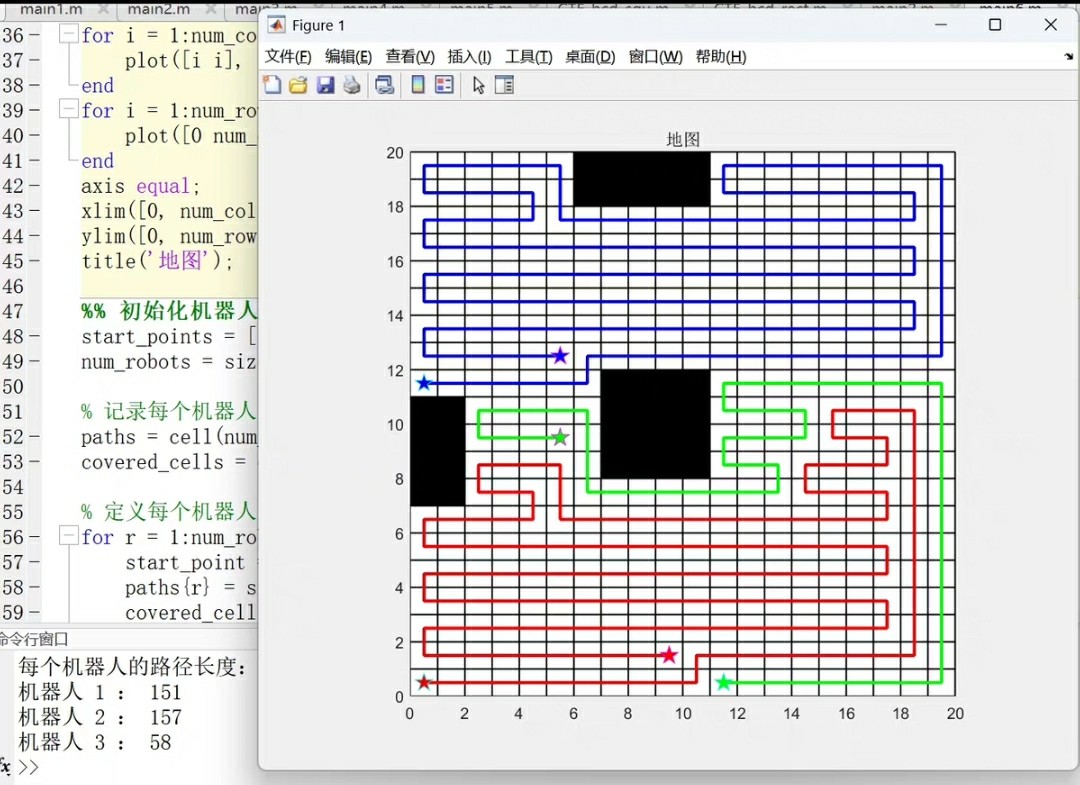
多无人机与移动机器人全覆盖路径规划
在多无人机和移动机器人全覆盖路径规划场景下,基于 A 星算法,我们需要进一步考虑如何让多个机器人协同工作,同时确保整个区域能够被完全覆盖。
地图自定义设置
// 自定义地图示例
std::vector<std::vector<bool>> customMap = {
{false, false, false, false, false},
{false, true, false, true, false},
{false, false, false, false, false},
{false, true, false, true, false},
{false, false, false, false, false}
};
// true 表示障碍物,false 表示可通行这样我们就简单定义了一个 5x5 的地图,其中 true 标识的地方就是障碍物,机器人不能通过。
障碍物自定义设置
我们在地图设置时就已经通过 true 和 false 来标识障碍物了。在实际应用中,可能会根据传感器数据实时更新这个地图,比如检测到新的障碍物就把对应位置设为 true。
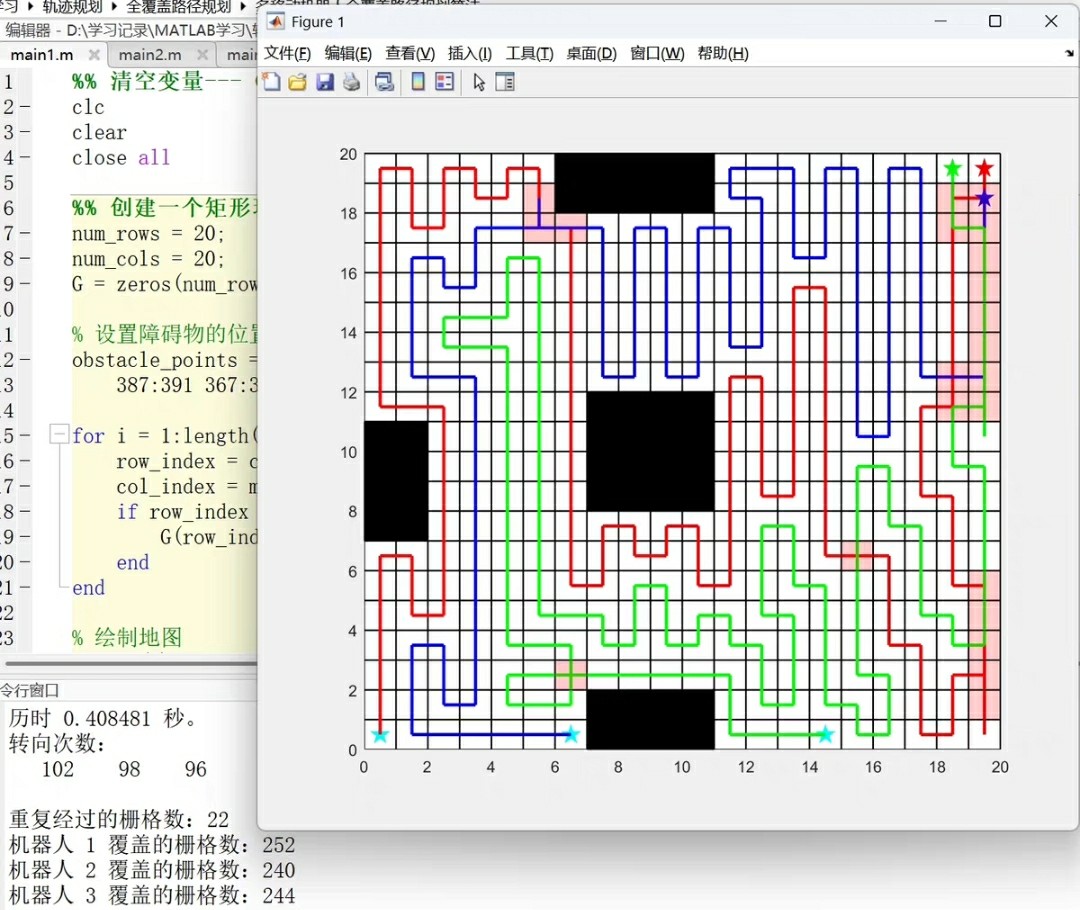
多无人机与移动机器人协同路径规划
在协同路径规划方面,我们可以基于 A 星算法为每个机器人规划各自的路径,同时考虑如何避免机器人之间的碰撞。比如可以采用一种简单的方法,为每个机器人分配不同的区域,在各自区域内使用 A 星算法规划路径。
代码实现思路
// 假设这里有两个机器人,定义起始点和目标点
Node* robot1Start = new Node(0, 0);
Node* robot1Goal = new Node(4, 4);
Node* robot2Start = new Node(0, 4);
Node* robot2Goal = new Node(4, 0);
// 分别为两个机器人规划路径
std::vector<Node*> robot1Path = aStarSearch(customMap, robot1Start, robot1Goal);
std::vector<Node*> robot2Path = aStarSearch(customMap, robot2Start, robot2Goal);这里简单演示了为两个机器人分别规划路径的过程,实际应用中可能会更复杂,要考虑机器人的速度、实时位置等因素来动态调整路径。
多无人机 移动机器人 扫地机器人 全覆盖路径规划 多无人机 移动机器人协同路径规划 multi uav robot coverage path planning,cpp,mcpp algorithm基于 A 星算法的路径规划方法,地图可自定义设置,障碍物也可自定义设置,算法适合二次开发使用
像扫地机器人的全覆盖路径规划,本质上也是类似的思路,只不过可能地图会更复杂,并且要考虑如何更高效地覆盖所有清洁区域,避免重复清扫等问题。
基于 A 星算法的路径规划方法,由于其良好的扩展性和灵活性,非常适合二次开发使用。无论是多无人机、移动机器人的协同作业,还是扫地机器人的日常清洁路径规划,都能通过合理的优化和扩展来满足不同的需求。希望今天分享的这些内容能给大家在相关领域的研究和开发带来一些启发。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐

 24
24 0
0- 0



 已为社区贡献4条内容
已为社区贡献4条内容

所有评论(0)