小白程序员必看:具身智能大模型全景图谱(VLM/VLN/VLA/WM/VLX全解析)
本文系统梳理了具身智能大模型的六大主流架构:VLM(跨模态理解)、VLN(空间导航)、VLA(执行控制)、VLX(融合框架)、世界模型(预测推理)和端到端(实现范式)。重点分析了各架构的技术特点、代表案例及相互关系,指出VLA与世界模型深度融合是未来趋势。文章通过层级、包含、演进等维度揭示架构间的内在联系,为把握2026年具身智能发展提供技术脉络参考。核心价值在于帮助理解如何让机器人实现"
本文梳理了具身智能大模型的六种主流架构(VLM、VLN、VLA、VLX、世界模型、端到端)的核心本质、技术特点与关系。VLM负责跨模态理解,VLN负责空间导航,VLA负责执行控制,世界模型负责预测推理,VLX是它们的融合框架,而端到端是技术实现范式。文章还总结了各架构间的层级、包含、演进、依赖等关系,并指出VLA+世界模型深度融合是主流趋势。助你快速掌握具身智能技术脉络,把握未来发展趋势。
具身智能大模型架构纷繁复杂,VLM、VLA、VLN、VLX、世界模型究竟有何区别与联系?本文梳理具身智能大模型全景图谱,深度解析各架构的核心本质、技术特点与关系,助你快速理清技术脉络,把握2026年具身智能发展趋势。
一、6种业界主流架构介绍
1、VLM(视觉-语言-模型)—— 感知理解层
核心本质:跨模态理解专家,负责"看懂"和"听懂",机器人的"眼睛与大脑"。
技术特点:
-
将视觉信息与语言语义映射到统一空间
-
能回答"图里有什么"、“发生了什么”
-
不能直接控制机器人肢体
代表案例:
- 北京人形机器人创新中心开源的Pelican-VL模型:扮演着“视觉语言大脑”的角色,为机器人提供强大的环境感知和指令理解能力。
- 阿里达摩院 RynnBrain:增强型 VLM,带有“时空记忆模块”和“物理世界推理”
的具身大脑
产品需求定义要点:
多模态语义对齐准确率 ≥ 95%
模糊指令理解成功率 ≥ 90%
跨模态响应延迟 ≤ 200ms
2、VLN(视觉-语言-导航)—— 空间导航层
核心本质:3D空间导航专家,解决"去哪里"的问题
技术特点:
- 给定自然语言指令(如"去厨房拿杯子")
- 在3D环境中通过视觉感知规划路径
- 主要关注移动
典型任务:
- 室内自主导航
- 目标位置搜寻
- 动态避障
代表案例:
-
VLNVerse(吴琦团队研发):吴琦团队推出全栈式具身导航平台,被业界称为"具身导航宇宙"。从场景生成到真机部署,一次性解决数据匮乏、物理仿真缺失、跨本体部署三大难题。与酷家乐合作获取家庭、工厂等场景数据,在四足机器狗、扫地机器人等设备上实现开放世界的导航应用。
-
VLN-PE(同济大学&上海AI Lab研发):是一个具备物理真实感的导航仿真平台,支持人形、四足和轮式机器人,填补从仿真到物理部署的空白,系统评估第一视角VLN方法在物理机器人环境中的表现。
-
VLN-R1(香港大学&上海人工智能实验室研发):打破传统离散地图依赖,直接将自然语言指令转化为第一人称视角下的流畅导航动作。
-
FSR-VLN(地平线机器人研发):快慢推理视觉语言导航。
-
工业界应用代表案例:波士顿动力 VLFM、真机智能、亚马逊 Kiva仓储机器
产品需求定义要点:
复杂环境导航成功率 ≥ 92%
动态障碍物规避响应 ≤ 100ms
定位精度 ≤ 5cm
热门VLN模型性能对比:
| 模型名称 | 参数量 | 计算效率 | 开源状态 | 适用场景 |
|---|---|---|---|---|
| VLN-R1 | 2B | 高 | 已开源 | 家庭服务 |
| NavCoT | 7B+ | 中 | 已开源 | 复杂室内 |
| DualVLN | 7B+轻量 | 高 | 已开源 | 多场景 |
| StreamVLN | 未公开 | 高 | 已开源 | 连续导航 |
| 地平线VLN | 未公开 | 高 | 已开源 | 工业场景 |
| VLNVerse | 多模型 | 中 | 已开源 | 全栈平台 |
3、VLA(视觉-语言-动作模型)—— 执行控制层
核心本质****:物理交互决策中枢,实现"感知-决策-动作"闭环,机器人的"大脑与脊髓"。
技术特点:
- 直接将视觉和语言输入映射为具体控制信号
- 端到端映射:从像素到动作
- 具备零样本泛化能力
代表案例:
-
GR00T N2(英伟达研发):基于Transformer的端到端VLA模型,支持双机器人协作,开源VLA基座模型;应用在工业协作、复杂操作、人形机器人全身控制。
-
Spirit v1.5(千寻智能研发):RoboChallenge评测成功率超50%,精细操作能力强,全球首个在权威评测中突破50%成功率的VLA模型。应用在贴胶带、插花、分拣等精细操作任务
-
Xiaomi-Robotics-0(小米研发):消费级显卡实现实时控制,采用双脑协同架构,大幅降低部署成本。应用在叠毛巾、分拣积木等家庭服务任务
-
GOVLA(智平方研发):首次输出全身控制和移动轨迹,支持人形机器人全身协同操作。应用在人形机器人全身协同操作、移动+操作复合任务。
-
VLA2.0(小鹏汽车研发):去掉语言转译环节,实现视觉信号到动作指令的端到端直接生成,同时具备物理世界模型能力。应用在自动驾驶、机器人操作、物理推理任务。
-
LingBot-VLA(蚂蚁灵波研发):开源具身基础模型,支持多任务迁移,具备较强的泛化能力。应用在通用操作任务、多任务迁移学习。
产品需求定义要点:
任务执行成功率 ≥ 90%
动作规划响应延迟 ≤ 150ms(英伟达2026标准)
未知场景泛化能力 ≥ 80%
力控精度 ≤ 0.5N
4、WM(世界模型)—— 预测推理层
核心本质:让机器人拥有"想象未来"的能力
技术特点:
- 预测环境动态和未来状态
- 具备生成性、多模态、互动性三大能力
- 实现因果推理和物理直觉
代表案例:
- DeepMind Genie 3(谷歌研发):将文本或图像提示转化为可实时交互的3D世界,以720p/24fps持续运行数分钟,支持"可提示的世界事件"(如改变天气、加入角色),同时维持较强的对象与场景记忆一致性,实现从被动视频到可控世界模拟器的跃迁。
- WoW(北京人形机器人创新中心研发):全称World-Omniscient World Model(具身世界模型),旨在帮助具身智能机器人快速学习掌握各项技能,助力行业打造"最好用"的机器人,支持多形态机器人本体适配。
- EVAC(智元机器人研发):全称EnerVerse-AC,全球首个基于动作序列驱动的世界模型。通过引入多级动作条件注入机制,实现"物理动作"与"视觉动态"的端到端精准映射。
- LingBot-World(蚂蚁灵波研发):蚂蚁集团开源的具身世界模型,支持多任务迁移学习和物理规律预测。与LingBot-VLA形成协同架构,实现"感知-预测-决策-动作"完整闭环,在长时程任务中表现优异。
产品需求定义要点:
物理规律预测准确率 ≥ 95%
未来状态预测时间跨度 ≥ 5秒
因果推理响应延迟 ≤ 200ms
长时程任务成功率 ≥ 90%
Sim2Real迁移保真度 ≥ 85%
风险预判提前量 ≥ 1秒
多模态状态表征维度 ≥ 512
在线学习更新频率 ≥ 10Hz
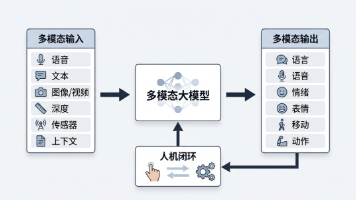
5、VLX(视觉-语言-X模型)—— 统一架构框架
核心本质:全栈统一架构框架,VLX可理解为VLM+VLN+VLA的融合架构。(注意:VLX目前并非行业通用标准术语)
技术目标:让机器人真正理解人类语言指令,看懂复杂的视觉场景,进而做出精准的动作反馈。
核心价值主张:让机器人像人一样思考与行动。
6、 端到端(End-to-End)—— 技术实现范式
核心本质:从输入到输出的直接映射,无需中间转换环节。
代表案例:小鹏VLA2.0、特斯拉FSD V12、英伟达GR00T
二、几种核心关系总结
1、VLM、VLN、VLA与VLX的关系
| 维度 | 描述 |
|---|---|
| 层级关系 | VLM(感知)→ VLN(导航)→ VLA(执行)→ VLX(统一) |
| 包含关系 | VLX囊括VLM、VLN、VLA,是三者的融合架构 |
| 演进关系 | 从单一能力模块向统一架构框架演进 |
| 依赖关系 | VLA以VLM为基础,VLX以VLA为核心扩展 |
2、VLN与VLA的关系
VLN是"移动子系统",VLA是"完整执行系统"——两者是子集与全集、导航与操作的包含关系。
3、 VLA与世界模型的关系
| 维度 | 描述 |
|---|---|
| 互补关系 | VLA负责"怎么做",世界模型负责"为什么这样做" |
| 融合趋势 | 主流范式:VLA+世界模型深度融合 |
| 能力增强 | 世界模型弥补VLA物理动作执行弱、泛化能力有限的痛点 |
| 代表案例 | 小鹏VLA2.0、英伟达GR00T+Cosmos、极佳视界GigaWorld |
| 典型问题 | VLA:“如何抓取这个杯子”;世界模型:“抓取后杯子会怎样” |
| 时间维度 | VLA是当下(当前状态→当前动作),世界模型是未来(当前状态→未来状态) |
4、VLA与端到端的关系
| 维度 | 描述 |
|---|---|
| 技术范式 | 端到端是方法论,VLA是具身智能领域的具体实现 |
| 演进阶段 | 端到端1.0(分层架构)→ 端到端2.0(VLA) |
| 依赖关系 | VLA依赖端到端范式实现感知-动作直连 |
| 行业共识 | VLA已成为2025-2026年具身智能主流技术范式 |
三、总结
VLM让机器人"看懂世界"
VLN让机器人"找到路径"
VLA让机器人"会动手"
VLX让机器人"全栈智能"
世界模型让机器人"会思考"
端到端让机器人"直觉反应"
如何系统的学习大模型 AI ?
由于新岗位的生产效率,要优于被取代岗位的生产效率,所以实际上整个社会的生产效率是提升的。
但是具体到个人,只能说是:
“最先掌握AI的人,将会比较晚掌握AI的人有竞争优势”。
这句话,放在计算机、互联网、移动互联网的开局时期,都是一样的道理。
我在一线互联网企业工作十余年里,指导过不少同行后辈。帮助很多人得到了学习和成长。
我意识到有很多经验和知识值得分享给大家,也可以通过我们的能力和经验解答大家在人工智能学习中的很多困惑,所以在工作繁忙的情况下还是坚持各种整理和分享。但苦于知识传播途径有限,很多互联网行业朋友无法获得正确的资料得到学习提升,故此将并将重要的AI大模型资料包括AI大模型入门学习思维导图、精品AI大模型学习书籍手册、视频教程、实战学习等录播视频免费分享出来。
一直在更新,更多的大模型学习和面试资料已经上传带到CSDN的官方了,有需要的朋友可以扫描下方二维码免费领取【保证100%免费】👇👇

01.大模型风口已至:月薪30K+的AI岗正在批量诞生

2025年大模型应用呈现爆发式增长,根据工信部最新数据:
国内大模型相关岗位缺口达47万
初级工程师平均薪资28K(数据来源:BOSS直聘报告)
70%企业存在"能用模型不会调优"的痛点
真实案例:某二本机械专业学员,通过4个月系统学习,成功拿到某AI医疗公司大模型优化岗offer,薪资直接翻3倍!
02.大模型 AI 学习和面试资料
1️⃣ 提示词工程:把ChatGPT从玩具变成生产工具
2️⃣ RAG系统:让大模型精准输出行业知识
3️⃣ 智能体开发:用AutoGPT打造24小时数字员工
📦熬了三个大夜整理的《AI进化工具包》送你:
✔️ 大厂内部LLM落地手册(含58个真实案例)
✔️ 提示词设计模板库(覆盖12大应用场景)
✔️ 私藏学习路径图(0基础到项目实战仅需90天)






第一阶段(10天):初阶应用
该阶段让大家对大模型 AI有一个最前沿的认识,对大模型 AI 的理解超过 95% 的人,可以在相关讨论时发表高级、不跟风、又接地气的见解,别人只会和 AI 聊天,而你能调教 AI,并能用代码将大模型和业务衔接。
- 大模型 AI 能干什么?
- 大模型是怎样获得「智能」的?
- 用好 AI 的核心心法
- 大模型应用业务架构
- 大模型应用技术架构
- 代码示例:向 GPT-3.5 灌入新知识
- 提示工程的意义和核心思想
- Prompt 典型构成
- 指令调优方法论
- 思维链和思维树
- Prompt 攻击和防范
- …
第二阶段(30天):高阶应用
该阶段我们正式进入大模型 AI 进阶实战学习,学会构造私有知识库,扩展 AI 的能力。快速开发一个完整的基于 agent 对话机器人。掌握功能最强的大模型开发框架,抓住最新的技术进展,适合 Python 和 JavaScript 程序员。
- 为什么要做 RAG
- 搭建一个简单的 ChatPDF
- 检索的基础概念
- 什么是向量表示(Embeddings)
- 向量数据库与向量检索
- 基于向量检索的 RAG
- 搭建 RAG 系统的扩展知识
- 混合检索与 RAG-Fusion 简介
- 向量模型本地部署
- …
第三阶段(30天):模型训练
恭喜你,如果学到这里,你基本可以找到一份大模型 AI相关的工作,自己也能训练 GPT 了!通过微调,训练自己的垂直大模型,能独立训练开源多模态大模型,掌握更多技术方案。
到此为止,大概2个月的时间。你已经成为了一名“AI小子”。那么你还想往下探索吗?
- 为什么要做 RAG
- 什么是模型
- 什么是模型训练
- 求解器 & 损失函数简介
- 小实验2:手写一个简单的神经网络并训练它
- 什么是训练/预训练/微调/轻量化微调
- Transformer结构简介
- 轻量化微调
- 实验数据集的构建
- …
第四阶段(20天):商业闭环
对全球大模型从性能、吞吐量、成本等方面有一定的认知,可以在云端和本地等多种环境下部署大模型,找到适合自己的项目/创业方向,做一名被 AI 武装的产品经理。
- 硬件选型
- 带你了解全球大模型
- 使用国产大模型服务
- 搭建 OpenAI 代理
- 热身:基于阿里云 PAI 部署 Stable Diffusion
- 在本地计算机运行大模型
- 大模型的私有化部署
- 基于 vLLM 部署大模型
- 案例:如何优雅地在阿里云私有部署开源大模型
- 部署一套开源 LLM 项目
- 内容安全
- 互联网信息服务算法备案
- …
学习是一个过程,只要学习就会有挑战。天道酬勤,你越努力,就会成为越优秀的自己。
如果你能在15天内完成所有的任务,那你堪称天才。然而,如果你能完成 60-70% 的内容,你就已经开始具备成为一名大模型 AI 的正确特征了。
这份完整版的大模型 AI 学习资料已经上传CSDN,朋友们如果需要可以微信扫描下方CSDN官方认证二维码免费领取【保证100%免费】

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐

 13
13 0
0- 0



 已为社区贡献64条内容
已为社区贡献64条内容

所有评论(0)