STM32F103_BLDC霍尔控制程序核心功能说明
本程序基于STM32F103系列微控制器,专为直流无刷电机(BLDC)的霍尔控制设计,是一套完整的底层驱动与控制框架。程序以CMSIS(Cortex Microcontroller Software Interface Standard)为基础,整合了核心寄存器操作、中断管理、时钟配置等底层功能,为BLDC电机的霍尔信号采集、转速控制、转向调节等核心控制逻辑提供稳定可靠的硬件抽象层支持,适用于需要
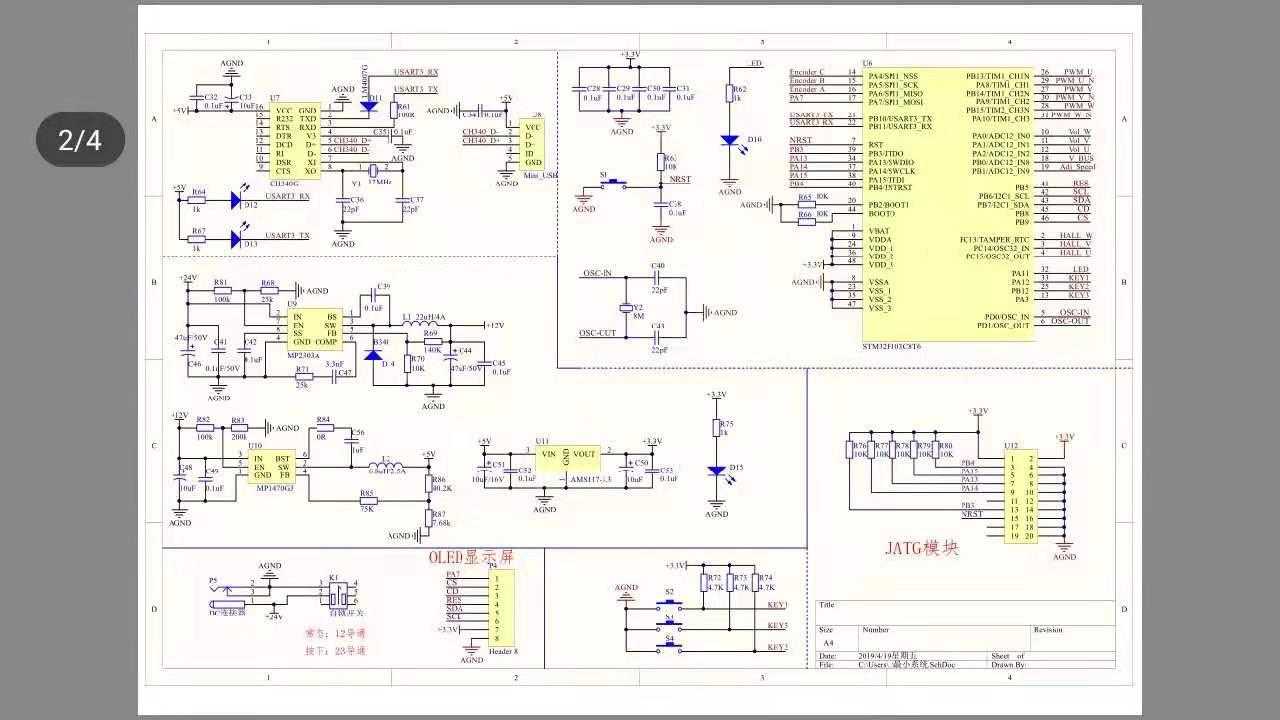
STM32F103C8T6直流无刷驱动器电路原理图,程序源代码
一、程序概述
本程序基于STM32F103系列微控制器,专为直流无刷电机(BLDC)的霍尔控制设计,是一套完整的底层驱动与控制框架。程序以CMSIS(Cortex Microcontroller Software Interface Standard)为基础,整合了核心寄存器操作、中断管理、时钟配置等底层功能,为BLDC电机的霍尔信号采集、转速控制、转向调节等核心控制逻辑提供稳定可靠的硬件抽象层支持,适用于需要高精度、高稳定性电机控制的场景,如工业自动化设备、智能家电、机器人驱动等。
二、核心模块功能解析
(一)CMSIS核心支持模块
该模块是程序运行的基础,提供了Cortex-M3内核的底层操作接口,屏蔽了不同编译器与硬件细节的差异,确保程序在多种开发环境下的兼容性与可移植性。
- 内核寄存器操作
- 栈指针管理:提供getPSP()、setPSP()、getMSP()、setMSP()等函数,分别用于获取和设置进程栈指针(PSP)与主栈指针(MSP)。在BLDC电机控制中,可通过栈指针的灵活配置,为中断服务函数(如霍尔信号中断、定时器中断)分配独立的栈空间,避免栈溢出导致的程序崩溃,保障电机控制逻辑的稳定运行。
- 中断与异常控制:包含getBASEPRI()、setBASEPRI()、getPRIMASK()、setPRIMASK()等函数,用于管理中断优先级屏蔽。在电机控制过程中,可通过设置BASEPRI寄存器,动态调整中断响应优先级,确保霍尔信号采集、PWM输出等关键中断能优先响应,提升电机控制的实时性。例如,当电机处于高速运转状态时,可提高霍尔信号中断的优先级,避免因中断延迟导致的转速计算误差。
- 控制寄存器操作:getCONTROL()与setCONTROL()函数用于获取和设置内核控制寄存器,可配置内核的工作模式(如特权模式/用户模式)、栈对齐方式等,为程序提供安全可靠的运行环境。 - 编译器兼容性适配
程序针对ARM Compiler(CC_ARM)、IAR Compiler(ICCARM)、GNU Compiler(GNUC)、TASKING Compiler(TASKING)四种主流编译器,分别实现了对应的关键字定义与函数接口。例如,在ARM Compiler中使用asm和inline关键字,在GNU Compiler中使用asm和inline关键字,确保汇编指令与内联函数在不同编译器下均能正确编译执行,极大降低了程序的移植难度。
(二)中断向量表与异常处理模块
中断向量表是程序响应外部事件与内部异常的核心,本程序针对STM32F103系列不同型号的微控制器(如低密度、中密度、高密度等),提供了对应的中断向量表定义,为BLDC电机控制所需的外设中断提供了响应入口。
- 向量表结构
向量表起始地址存储主栈指针(initialsp),随后依次存储复位handler、NMIhandler、HardFaulthandler等内核异常处理函数地址,以及外部中断(如霍尔信号对应的EXTI中断、定时器中断、USART中断等)的处理函数地址。例如,在中密度(MD)型号的向量表中,包含了TIM1BRKIRQHandler(TIM1刹车中断)、EXTI95IRQHandler(外部中断线9-5)等与电机控制密切相关的中断入口,为霍尔信号采集、PWM输出保护等功能提供了硬件级的响应支持。 - 默认异常处理
程序为未自定义的异常(如NMI、HardFault、BusFault等)提供了默认处理函数,默认实现为无限循环(B .)。在实际的BLDC电机控制项目中,开发者可基于这些默认函数进行扩展,例如在HardFault_handler中添加故障诊断与日志输出功能,当程序出现硬件故障(如内存访问错误、总线错误)时,及时记录故障信息,便于后期调试与问题定位,提升系统的可靠性。
(三)外设寄存器定义模块(stm32f10x.h)
该模块是程序操作STM32F103外设的“桥梁”,通过结构体与宏定义,将微控制器的外设寄存器(如GPIO、RCC、TIM、EXTI等)抽象为易于操作的软件接口,为BLDC电机控制的硬件配置提供了直接支持。
- 外设结构体定义
- GPIO结构体:定义了GPIOTypeDef结构体,包含CRL(端口配置低寄存器)、CRH(端口配置高寄存器)、IDR(端口输入数据寄存器)、ODR(端口输出数据寄存器)等成员。在霍尔传感器接口配置中,可通过修改CRL/CRH寄存器,将对应GPIO引脚配置为上拉输入模式,通过IDR寄存器读取霍尔传感器输出的电平信号,判断电机转子位置;同时,可通过ODR或BSRR寄存器控制电机驱动电路的使能引脚,实现电机的启停控制。
- RCC结构体:RCCTypeDef结构体包含CR(时钟控制寄存器)、CFGR(时钟配置寄存器)、APB2ENR(APB2外设时钟使能寄存器)等成员。在电机控制初始化阶段,需通过该结构体配置系统时钟(如将PLL时钟配置为72MHz),并使能霍尔传感器对应的GPIO端口时钟、定时器时钟、EXTI时钟等。例如,通过RCC->APB2ENR |= RCCAPB2ENRIOPAEN | RCCAPB2ENRAFIOEN,使能GPIOA端口与AFIO(复用功能IO)的时钟,为霍尔信号的外部中断配置提供时钟支持。
- TIM结构体:TIM_TypeDef结构体涵盖了CR1(控制寄存器1)、CCMR1(捕获/比较模式寄存器1)、CCER(捕获/比较使能寄存器)、ARR(自动重装载寄存器)等成员,是生成PWM信号的核心。在BLDC电机控制中,可配置TIM1为PWM输出模式,通过修改ARR寄存器设置PWM周期,修改CCR1/CCR2/CCR3寄存器调整PWM占空比,从而控制电机的转速与扭矩;同时,可利用TIM的刹车功能(BKIN引脚),在电机出现过流、过压等异常情况时,快速关闭PWM输出,保护电机与驱动电路。 - 寄存器位定义
程序为每个外设寄存器的每一位都定义了对应的宏,例如GPIOCRLMODE0(GPIO端口0的模式位)、RCCCRHSEON(外部高速时钟使能位)、TIMCR1CEN(定时器使能位)等。开发者在配置外设时,可直接使用这些宏操作寄存器的特定位,无需手动计算位偏移,降低了代码编写难度与出错概率。例如,通过GPIOA->CRL &= ~GPIOCRLMODE0,可快速将GPIOA端口0的模式位清零,配置为输入模式,操作简洁且易于理解。
(四)系统时钟配置支持
系统时钟是微控制器稳定运行的基础,直接影响电机控制的精度(如PWM频率、霍尔信号采样频率)。本程序通过RCC相关的寄存器定义与宏,支持开发者灵活配置系统时钟源与时钟分频系数。
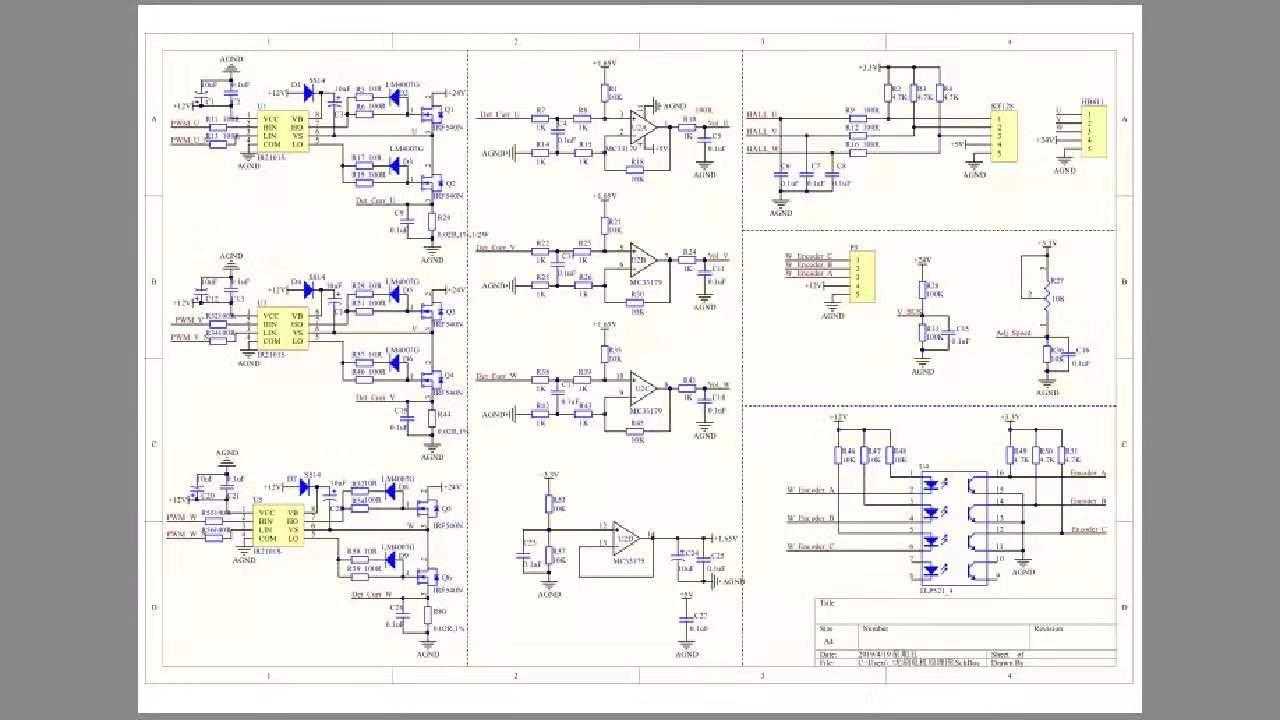
STM32F103C8T6直流无刷驱动器电路原理图,程序源代码

在BLDC电机控制中,通常将系统时钟配置为72MHz(基于外部8MHz晶振,通过PLL倍频9倍得到)。具体配置流程可通过操作RCC结构体实现:首先使能外部高速时钟(HSE)并等待时钟稳定,然后配置PLL时钟源为HSE,设置PLL倍频系数,使能PLL并等待PLL锁定,最后将系统时钟切换为PLL输出。稳定的72MHz系统时钟可确保定时器生成高精度的PWM信号(如10kHz的PWM频率,周期误差仅为0.1μs),同时保证霍尔信号的采样频率满足电机高速运转时的位置检测需求,避免因时钟不稳定导致的电机控制精度下降。
三、BLDC电机控制的底层支撑逻辑
(一)霍尔信号采集的硬件适配
BLDC电机的霍尔控制依赖于霍尔传感器输出的位置信号(通常为3路正交信号),本程序通过以下底层功能为霍尔信号采集提供支持:
- GPIO配置:通过
GPIO结构体将霍尔传感器连接的GPIO引脚配置为上拉输入模式,确保在无信号输入时引脚电平稳定,避免外部干扰导致的误触发。 - 外部中断配置:利用
AFIO结构体(如AFIOEXTICR1~AFIOEXTICR4)将霍尔信号引脚映射到对应的EXTI中断线,并通过EXTI结构体配置中断触发方式(上升沿、下降沿或双边沿触发)。例如,将霍尔信号A、B、C分别映射到EXTI0、EXTI1、EXTI2中断线,配置为双边沿触发,当电机转子转动时,霍尔信号电平变化会触发EXTI中断,在中断服务函数中读取当前霍尔信号状态,计算电机转子位置与转速。 - 中断优先级配置:通过CMSIS提供的
NVIC_SetPriority()函数,设置霍尔信号中断的优先级高于普通外设中断(如USART中断),确保在电机高速运转时,霍尔信号的变化能被及时捕获,避免因中断延迟导致的转子位置计算错误,保障电机的平稳运行。
(二)PWM输出与电机驱动控制
PWM信号是控制BLDC电机转速与扭矩的核心,本程序通过定时器外设的底层支持,实现PWM信号的精准生成与控制:
- 定时器配置:选择TIM1(高级定时器)作为PWM输出定时器,通过
TIM结构体配置定时器工作模式为PWM模式1或模式2,设置自动重装载值(ARR)确定PWM周期,设置捕获/比较寄存器(CCR)确定PWM占空比。例如,当系统时钟为72MHz,定时器分频系数为0时,若ARR设置为7199,则PWM频率为72MHz/(7199+1)=10kHz,满足大多数BLDC电机的驱动需求;通过修改CCR寄存器的值(如3600),可将PWM占空比设置为50%,控制电机的平均电压,实现转速调节。 - PWM输出使能:通过
TIM_CCER寄存器使能定时器的捕获/比较通道输出,将PWM信号输出到电机驱动电路的控制引脚(如IN1、IN2、IN3),配合霍尔信号确定的转子位置,实现电机的换相控制,确保电机持续平稳运转。 - 刹车保护:利用TIM1的刹车功能(BKIN引脚),通过
TIM_BDTR寄存器配置刹车模式(如高电平刹车、低电平刹车),当电机出现过流、过压等异常情况时,外部保护电路会触发刹车信号,TIM1会立即关闭PWM输出,防止电机与驱动电路损坏,提升系统的安全性。
四、程序的扩展性与移植性
- 硬件兼容性:程序支持STM32F103系列不同密度、不同型号的微控制器(如LD、MD、HD、XL等),通过宏定义(如
STM32F10X_MD)区分不同硬件型号,自动适配对应的中断向量表与外设寄存器定义。开发者在更换硬件型号时,只需修改对应的宏定义,无需大量修改代码,极大提升了程序的硬件兼容性。 - 功能扩展性:程序的核心模块(如CMSIS、中断处理、外设定义)均采用模块化设计,开发者可基于现有模块轻松扩展功能。例如,在电机控制中需要添加转速闭环控制时,可基于现有的定时器与中断功能,添加PID算法实现转速反馈调节;若需要添加上位机通信功能,可利用程序中
USART相关的寄存器定义,配置USART外设实现数据收发,扩展便捷且不影响原有核心逻辑。 - 编译器兼容性:如前文所述,程序针对四种主流编译器进行了适配,开发者可根据项目需求选择合适的开发环境,无需担心编译器差异导致的代码编译问题,降低了项目开发的工具选型限制。
五、总结
本STM32F103_BLDC霍尔控制程序通过模块化的CMSIS核心支持、完善的中断向量表、详细的外设寄存器定义,为BLDC电机控制提供了坚实的底层基础。程序不仅实现了内核操作、中断管理、外设配置等核心底层功能,还具备良好的兼容性与扩展性,能够适配不同硬件型号与开发环境,满足多样化的BLDC电机控制需求。开发者可基于本程序,快速搭建BLDC电机控制系统,聚焦于电机控制算法(如转速闭环控制、换相逻辑优化)的开发,显著缩短项目开发周期,提升产品的稳定性与可靠性。


DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐

 16
16 0
0- 0



 已为社区贡献5条内容
已为社区贡献5条内容

所有评论(0)