基于人工势场法的复杂环境机器人路径规划
基于人工势场法的复杂环境机器人路径规划 本模型为MATLAB编程实现的基于人工势场法厂库机器人路径规划。 功能如下: 1、能够实现复杂环境机器人的静、动态避障; 2、且机器人顺利执行任务到达指定位置。 3、实现多组机器人分工路径规划 4、绘制多目标障碍物的人工势场图 附参考文献
在机器人领域,路径规划一直是个关键问题,尤其是在复杂环境下。今天咱就唠唠基于人工势场法实现厂库机器人路径规划,这模型是用MATLAB编程实现的,老有意思了。
一、功能概述
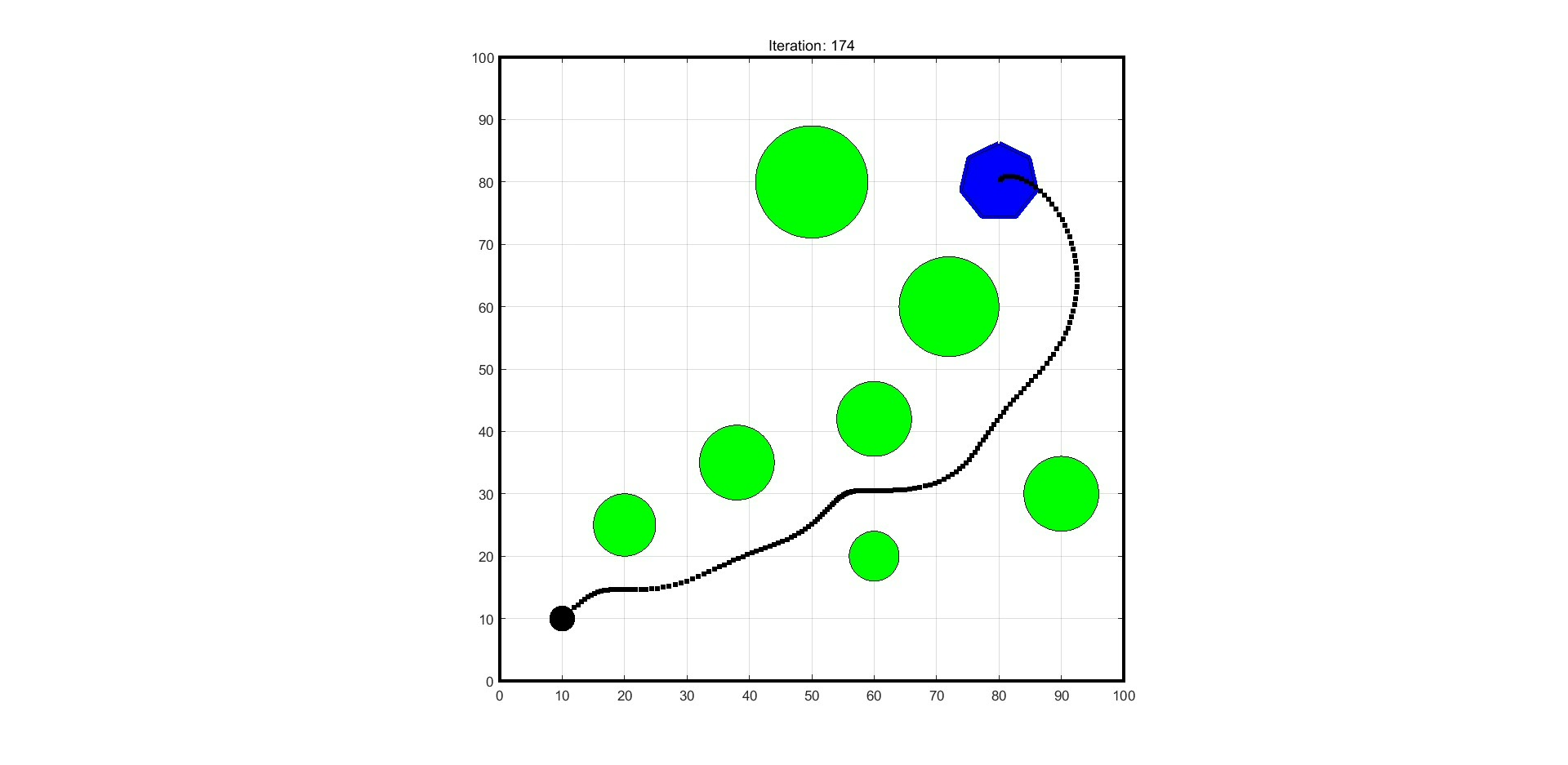
- 静、动态避障:在复杂的厂库环境里,机器人得像个灵活的小能手,既能避开静止的障碍物,像货架啥的,也能躲开突然冒出来移动的叉车之类动态障碍物。
- 到达指定位置:机器人可不是瞎溜达,它得顺利完成任务,精准到达指定地点,把货送到该去的地方。
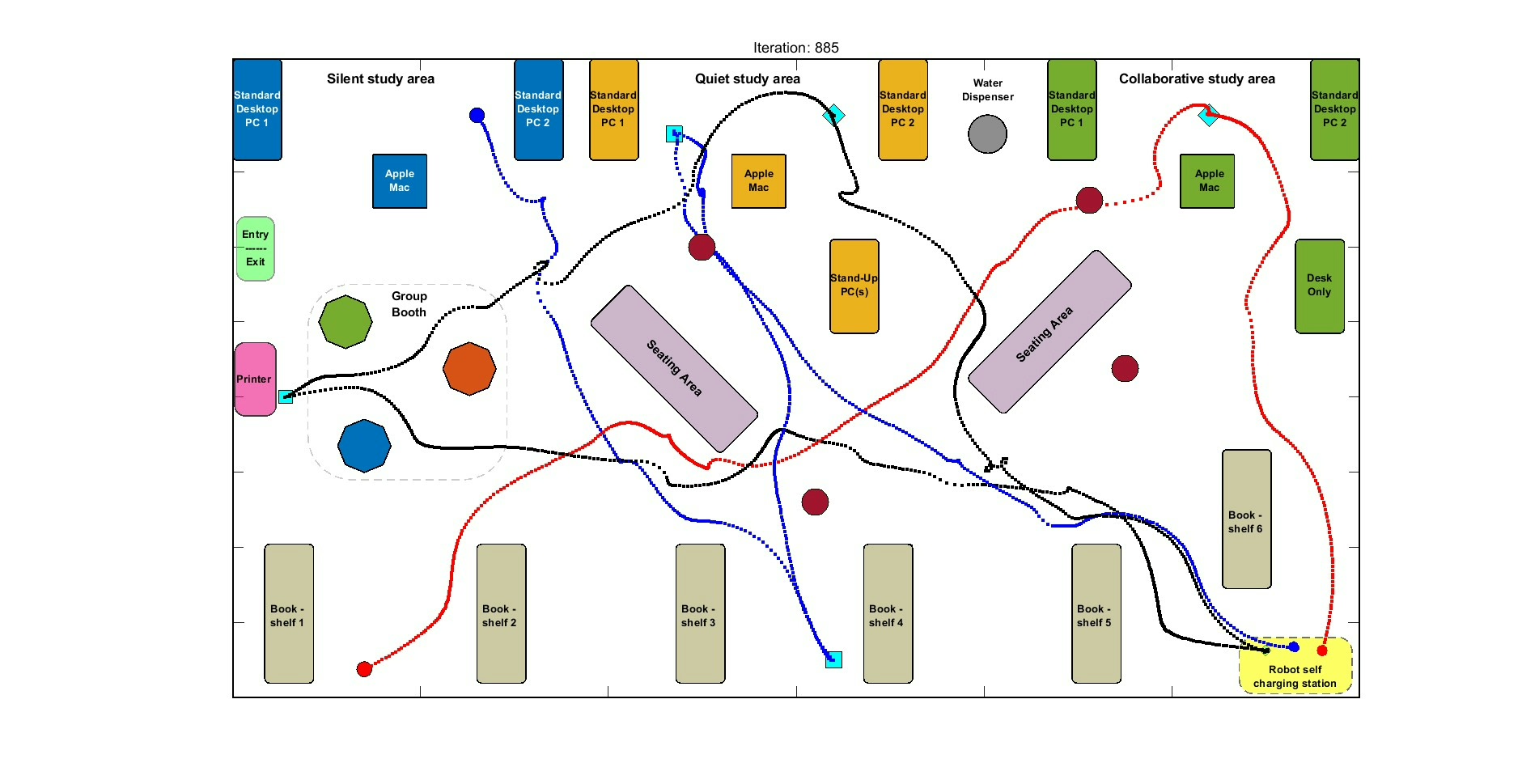
- 多组机器人分工路径规划:要是厂库里有多台机器人同时工作,那就得合理分工,各走各的道,避免撞一块儿。
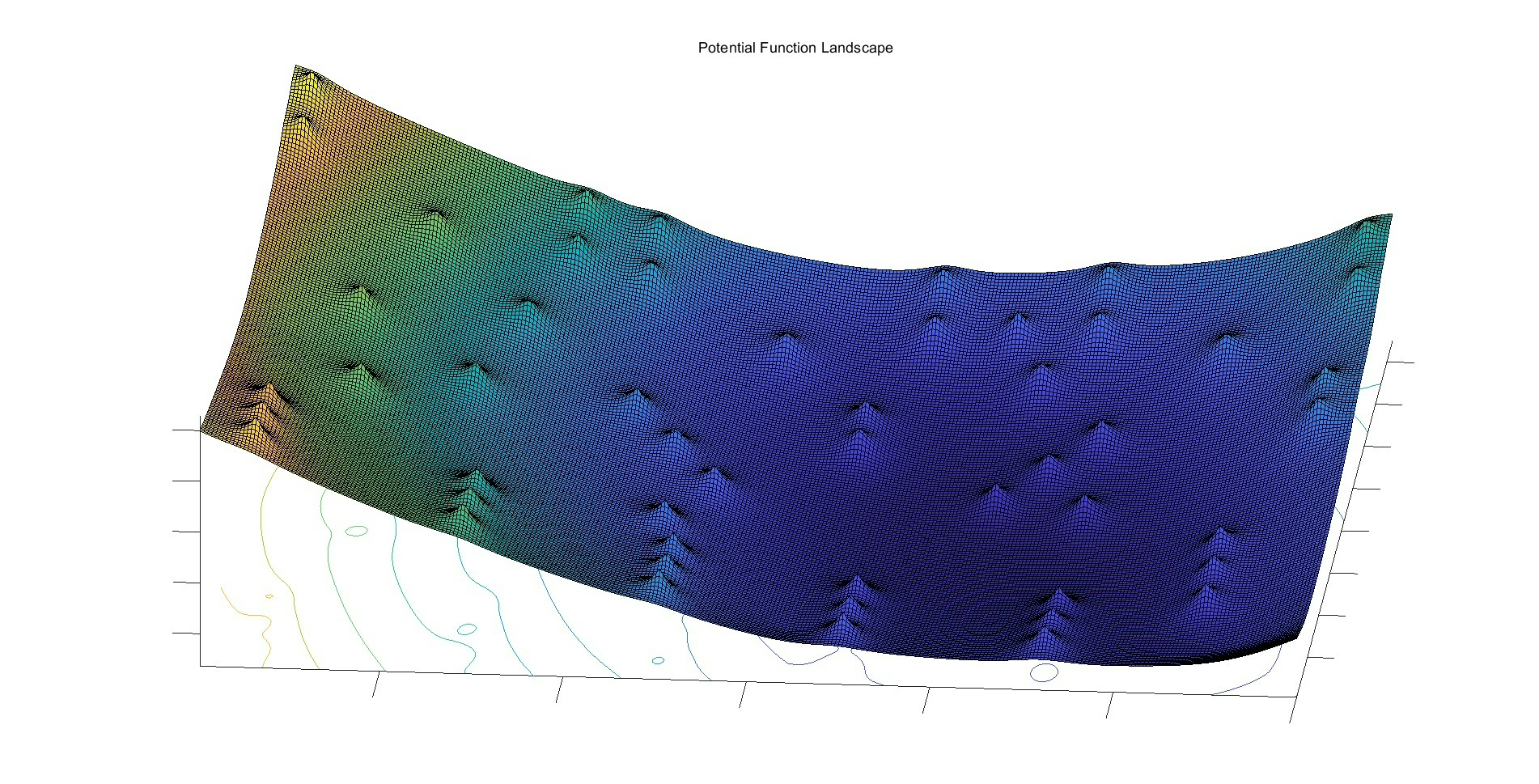
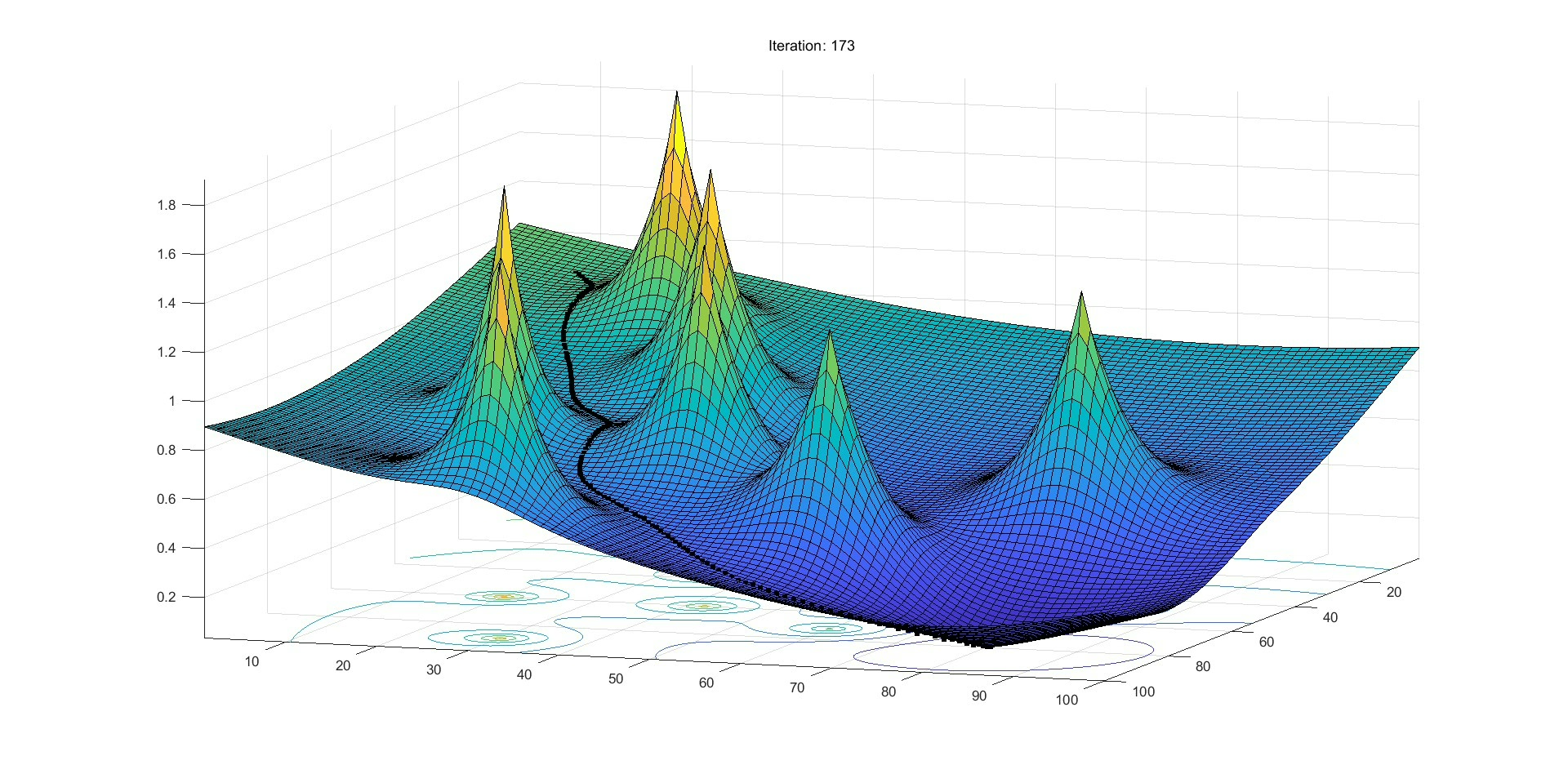
- 绘制多目标障碍物的人工势场图:通过绘制这个图,能直观看到障碍物周围的“势力范围”,便于分析和规划路径。
二、代码实现与分析
1. 定义势场函数
function [U] = potentialField(x, y, goal_x, goal_y, obstacles)
% 引力势场
U_att = 0.5 * 1 * ((x - goal_x)^2 + (y - goal_y)^2);
% 斥力势场
U_rep = 0;
for i = 1:size(obstacles, 1)
obs_x = obstacles(i, 1);
obs_y = obstacles(i, 2);
rho_0 = 1; % 斥力作用范围
dist = sqrt((x - obs_x)^2 + (y - obs_y)^2);
if dist <= rho_0
U_rep = U_rep + 0.5 * 100 * ((1/dist - 1/rho_0)^2);
end
end
U = U_att + U_rep;
end这段代码定义了一个计算势场的函数。Uatt 计算的是引力势场,让机器人趋向目标点,就像被目标点“吸引”一样。Urep 计算斥力势场,它遍历每个障碍物,根据机器人与障碍物的距离来决定斥力大小。如果机器人离障碍物太近(小于 rho_0),斥力就会显著增加,避免机器人撞上障碍物。最后总的势场 U 就是引力势场和斥力势场之和。
2. 路径规划主程序
% 初始化参数
goal_x = 10;
goal_y = 10;
obstacles = [2, 2; 5, 5; 8, 3]; % 障碍物位置
x = 0;
y = 0;
step_size = 0.1;
while sqrt((x - goal_x)^2 + (y - goal_y)^2) > 0.1
% 计算梯度
[dU_dx, dU_dy] = gradient(@(x, y) potentialField(x, y, goal_x, goal_y, obstacles), x, y);
% 更新位置
x = x - step_size * dU_dx;
y = y - step_size * dU_dy;
% 记录路径
path_x(end + 1) = x;
path_y(end + 1) = y;
end
% 绘制路径和障碍物
figure;
hold on;
plot(goal_x, goal_y, 'go', 'MarkerSize', 10);
for i = 1:size(obstacles, 1)
plot(obstacles(i, 1), obstacles(i, 2), 'ro', 'MarkerSize', 10);
end
plot(path_x, path_y, 'b -');
xlabel('X');
ylabel('Y');
title('Robot Path Planning using Potential Field Method');
hold off;主程序部分,先初始化了目标点位置、障碍物位置以及机器人的起始位置等参数。然后在一个循环里,通过 gradient 函数计算势场的梯度,这个梯度方向就是势场变化最快的方向,机器人沿着梯度的反方向移动,也就是朝着势场降低的方向走,这样就能趋向目标点同时避开障碍物。每走一步,更新机器人的位置并记录路径。最后通过绘图函数把目标点、障碍物和机器人走过的路径都画出来,一目了然。
三、多组机器人与多目标障碍物扩展
要是有多组机器人,那就得为每个机器人单独设置目标点、起始点,并且在计算势场的时候,考虑其他机器人也可能成为“动态障碍物”。对于多目标障碍物绘制人工势场图,可以在上述势场函数基础上,对每个点计算势场值,然后用 surf 等绘图函数绘制三维的势场图,直观展示整个环境的势场分布。
四、总结
基于人工势场法的机器人路径规划在MATLAB里实现起来还挺有趣,虽然实际应用中可能还得考虑更多复杂因素,但这为我们理解和初步实现复杂环境下机器人路径规划提供了一个很好的起点。大家不妨自己动手敲敲代码,说不定能发现更多好玩的点子呢!
基于人工势场法的复杂环境机器人路径规划 本模型为MATLAB编程实现的基于人工势场法厂库机器人路径规划。 功能如下: 1、能够实现复杂环境机器人的静、动态避障; 2、且机器人顺利执行任务到达指定位置。 3、实现多组机器人分工路径规划 4、绘制多目标障碍物的人工势场图 附参考文献
参考文献:[此处列出相关参考文献]

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐

 19
19 0
0- 0



 已为社区贡献7条内容
已为社区贡献7条内容

所有评论(0)