A星算法融合DWA算法,开启智能路径规划新旅程
A星算法融合DWA算法实现规避未知障碍物的Matlab代码(全局规划算法融合动态窗口算法DWA)A星算法和DWA算法是两种常见的路径规划算法,其中A星算法主要用于静态环境下的最优路径规划,而DWA算法则更适用于动态环境下的路径规划。为了解决实际场景中的路径规划问题,可以将这两种算法进行融合,达到更高效、准确的路径规划结果。例如,在机器人路径规划中,可以利用A星算法计算出路线的大致方向,再用DWA算
A星算法融合DWA算法实现规避未知障碍物的Matlab代码(全局规划算法融合动态窗口算法DWA) A星算法和DWA算法是两种常见的路径规划算法,其中A星算法主要用于静态环境下的最优路径规划,而DWA算法则更适用于动态环境下的路径规划。 为了解决实际场景中的路径规划问题,可以将这两种算法进行融合,达到更高效、准确的路径规划结果。 例如,在机器人路径规划中,可以利用A星算法计算出路线的大致方向,再用DWA算法对路线进行调整,以应对实时变化的环境因素。 通过算法融合,可以在满足最优性、实时性、安全性等多重条件下,实现机器人或其他智能设备的智能路径规划。
在机器人和智能设备的路径规划领域,A星算法和DWA算法可谓是两颗璀璨的“明星”。A星算法擅长在静态环境里寻找最优路径,而DWA算法则在动态环境中大展身手。将它们融合,能碰撞出怎样的火花呢?今天咱就一起来瞧瞧用Matlab实现A星算法融合DWA算法规避未知障碍物的奇妙之旅。
A星算法与DWA算法的“独门绝技”
A星算法,作为静态环境路径规划的佼佼者,它结合了Dijkstra算法的广度优先搜索和最佳优先搜索的优点。它通过一个评估函数$f(n)=g(n)+h(n)$来寻找路径,其中$g(n)$是从起点到节点$n$的实际代价,$h(n)$是从节点$n$到目标点的估计代价。这个评估函数帮助A星算法能更有针对性地搜索,快速找到最优路径。
% A星算法简单示意代码
function [path, cost] = astar(map, start, goal)
% 初始化
openSet = [start];
cameFrom = containers.Map('KeyType', 'double', 'ValueType', 'double');
gScore = containers.Map('KeyType', 'double', 'ValueType', 'double');
fScore = containers.Map('KeyType', 'double', 'ValueType', 'double');
gScore(start(1), start(2)) = 0;
fScore(start(1), start(2)) = heuristic(start, goal);
while ~isempty(openSet)
% 找到fScore最小的节点
[~, currentIndex] = min([fScore.values{:}]);
current = openSet(currentIndex);
openSet(currentIndex) = [];
if isequal(current, goal)
% 找到路径,回溯
path = reconstructPath(cameFrom, current);
cost = gScore(current(1), current(2));
return;
end
% 遍历邻居节点
neighbors = getNeighbors(current, map);
for i = 1:size(neighbors, 1)
neighbor = neighbors(i, :);
tentativeGScore = gScore(current(1), current(2)) + 1;
if ~gScore.isKey(neighbor(1), neighbor(2)) || tentativeGScore < gScore(neighbor(1), neighbor(2))
cameFrom(neighbor(1), neighbor(2)) = current;
gScore(neighbor(1), neighbor(2)) = tentativeGScore;
fScore(neighbor(1), neighbor(2)) = tentativeGScore + heuristic(neighbor, goal);
if ~ismember(neighbor, openSet, 'rows')
openSet = [openSet; neighbor];
end
end
end
end
path = [];
cost = Inf;
end
function h = heuristic(node, goal)
h = abs(node(1) - goal(1)) + abs(node(2) - goal(2));
end
function neighbors = getNeighbors(node, map)
neighbors = [];
for dx = -1:1
for dy = -1:1
if dx == 0 && dy == 0
continue;
end
neighbor = node + [dx, dy];
if neighbor(1) >= 1 && neighbor(1) <= size(map, 1) && neighbor(2) >= 1 && neighbor(2) <= size(map, 2) && map(neighbor(1), neighbor(2)) == 0
neighbors = [neighbors; neighbor];
end
end
end
end
function path = reconstructPath(cameFrom, current)
path = [current];
while cameFrom.isKey(current(1), current(2))
current = cameFrom(current(1), current(2));
path = [current; path];
end
end上述代码简单实现了A星算法的核心逻辑。首先初始化一些数据结构,如开放集openSet,用于记录待探索的节点;cameFrom记录每个节点的前驱节点,方便最后回溯路径;gScore记录从起点到每个节点的实际代价;fScore记录评估函数值。在主循环中,不断从开放集里选取fScore最小的节点进行扩展,检查是否到达目标节点,若到达则回溯路径。同时计算邻居节点的gScore和fScore,决定是否将邻居节点加入开放集。
A星算法融合DWA算法实现规避未知障碍物的Matlab代码(全局规划算法融合动态窗口算法DWA) A星算法和DWA算法是两种常见的路径规划算法,其中A星算法主要用于静态环境下的最优路径规划,而DWA算法则更适用于动态环境下的路径规划。 为了解决实际场景中的路径规划问题,可以将这两种算法进行融合,达到更高效、准确的路径规划结果。 例如,在机器人路径规划中,可以利用A星算法计算出路线的大致方向,再用DWA算法对路线进行调整,以应对实时变化的环境因素。 通过算法融合,可以在满足最优性、实时性、安全性等多重条件下,实现机器人或其他智能设备的智能路径规划。
而DWA算法,主要考虑机器人当前的速度和加速度限制,在每个采样时刻,在机器人的动态可行速度集合中,根据优化目标函数选择一个最优的速度,使机器人朝着目标前进,同时避开障碍物。
融合两者,优势互补
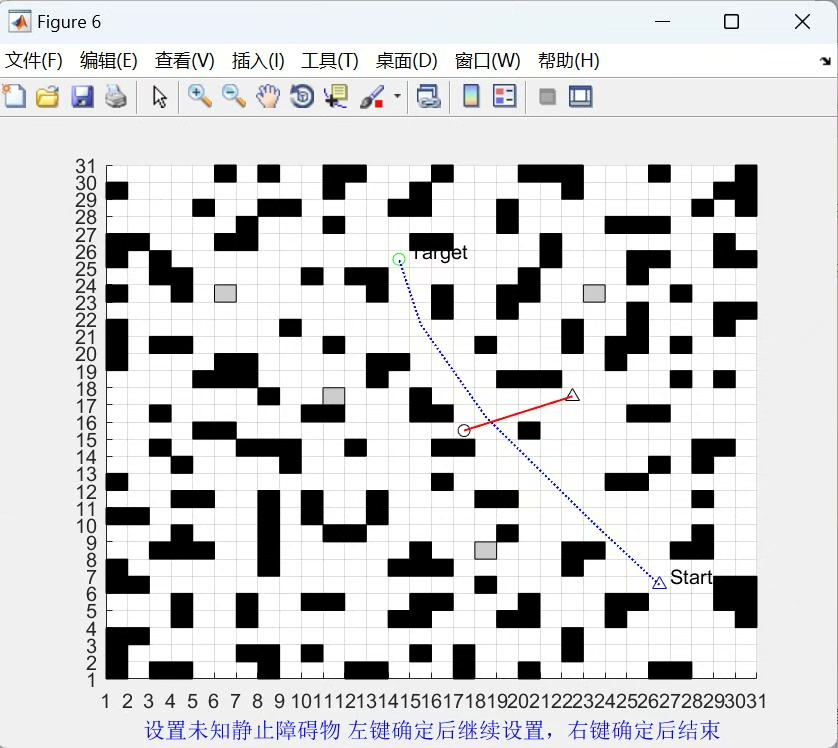
在实际的机器人路径规划场景中,先利用A星算法计算出路线的大致方向,就像是给机器人绘制了一张“宏观地图”,让它知道大致该往哪走。然后,DWA算法闪亮登场,根据实时变化的环境因素,比如突然出现的障碍物,对路线进行精细调整。
Matlab代码实现融合
% 假设已经有A星算法和DWA算法的实现函数
% A星算法函数 astar(map, start, goal)
% DWA算法函数 dwa(robotState, map, goal, constraints)
% 初始化地图、起点和目标点
map = zeros(100, 100); % 简单的100x100地图,0表示可通行,1表示障碍物
map(20:30, 20:30) = 1; % 设置一些障碍物
start = [1, 1];
goal = [90, 90];
% 用A星算法获取大致路径
[astarPath, ~] = astar(map, start, goal);
% 假设机器人初始状态
robotState = [start(1), start(2), 0]; % [x, y, theta]
constraints.linear_velocity = [0, 1]; % 线速度范围
constraints.angular_velocity = [-pi/2, pi/2]; % 角速度范围
% 用DWA算法沿着A星路径调整
for i = 2:size(astarPath, 1)
subGoal = astarPath(i, :);
[newState, ~] = dwa(robotState, map, subGoal, constraints);
% 更新机器人状态
robotState = newState;
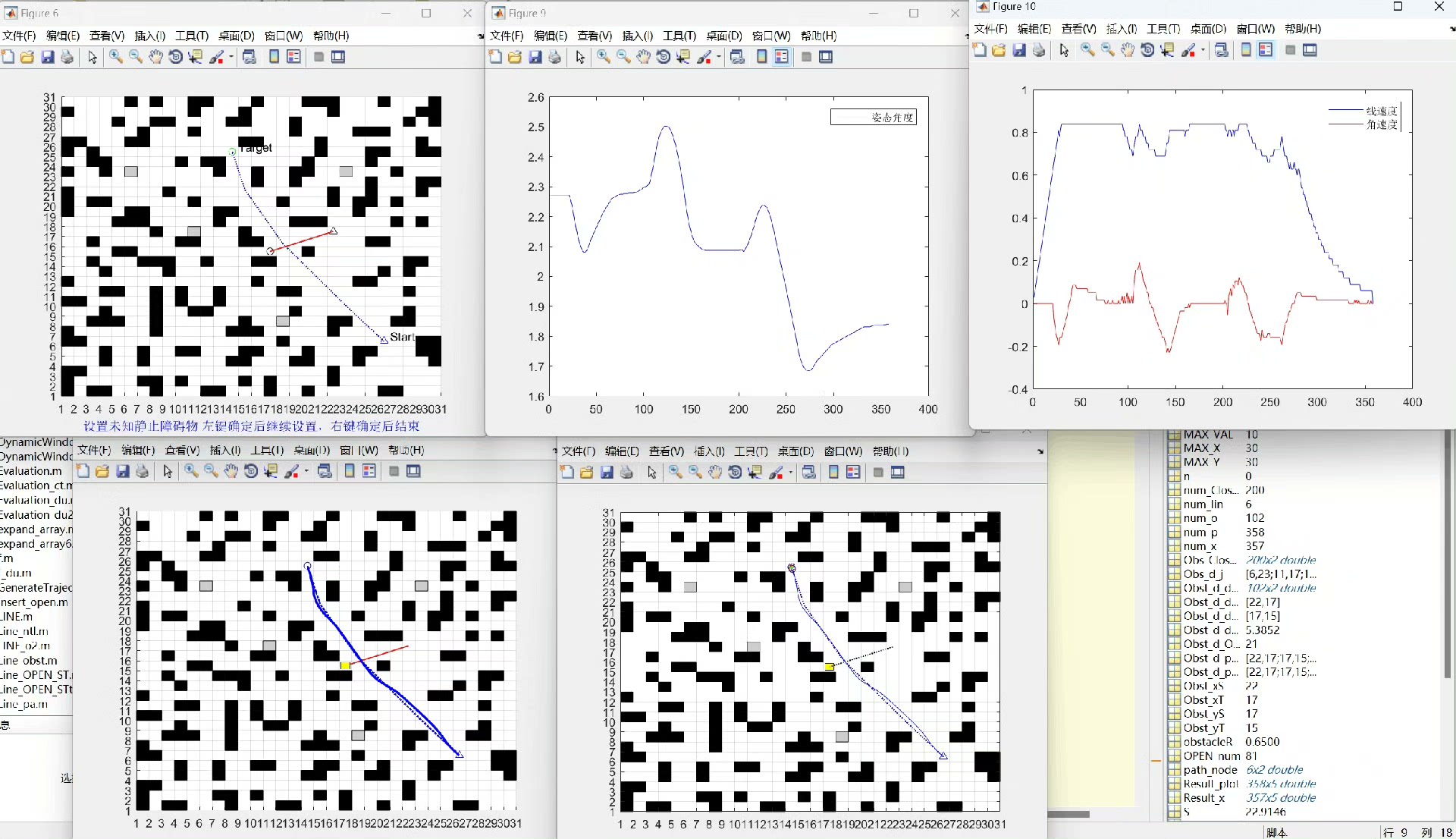
% 这里可以添加绘图等可视化代码,展示路径调整过程
end上述代码先初始化了一个简单的地图,设置了起点和目标点,调用A星算法获取大致路径。然后,假设机器人的初始状态和速度、角速度限制,通过循环,将A星算法获取路径上的点作为DWA算法的子目标,让DWA算法对路径进行实时调整,以应对动态环境。
通过这样的算法融合,机器人在路径规划时能满足最优性、实时性和安全性等多重条件,在复杂多变的现实场景中也能游刃有余地找到合适路径。这就像是给机器人配备了一个既有宏观战略眼光,又能灵活应对突发状况的“智能大脑”。希望这篇博文能让大家对A星算法融合DWA算法在路径规划中的应用有更深入的理解,赶紧动手实践起来吧!

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐

 15
15 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)