六自由度机械臂RRT路径规划与梯形速度规划避障实现
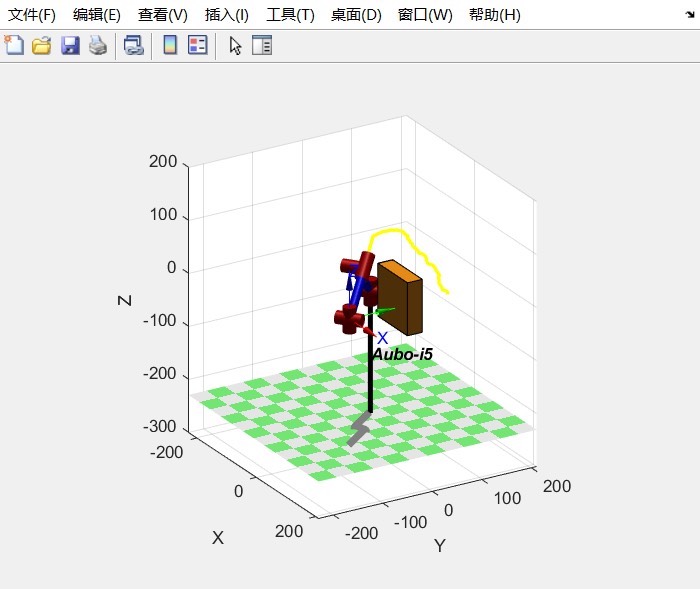
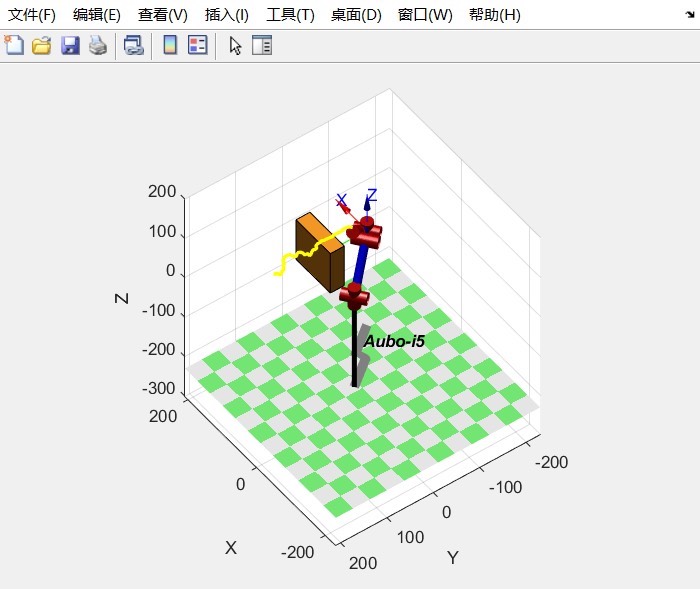
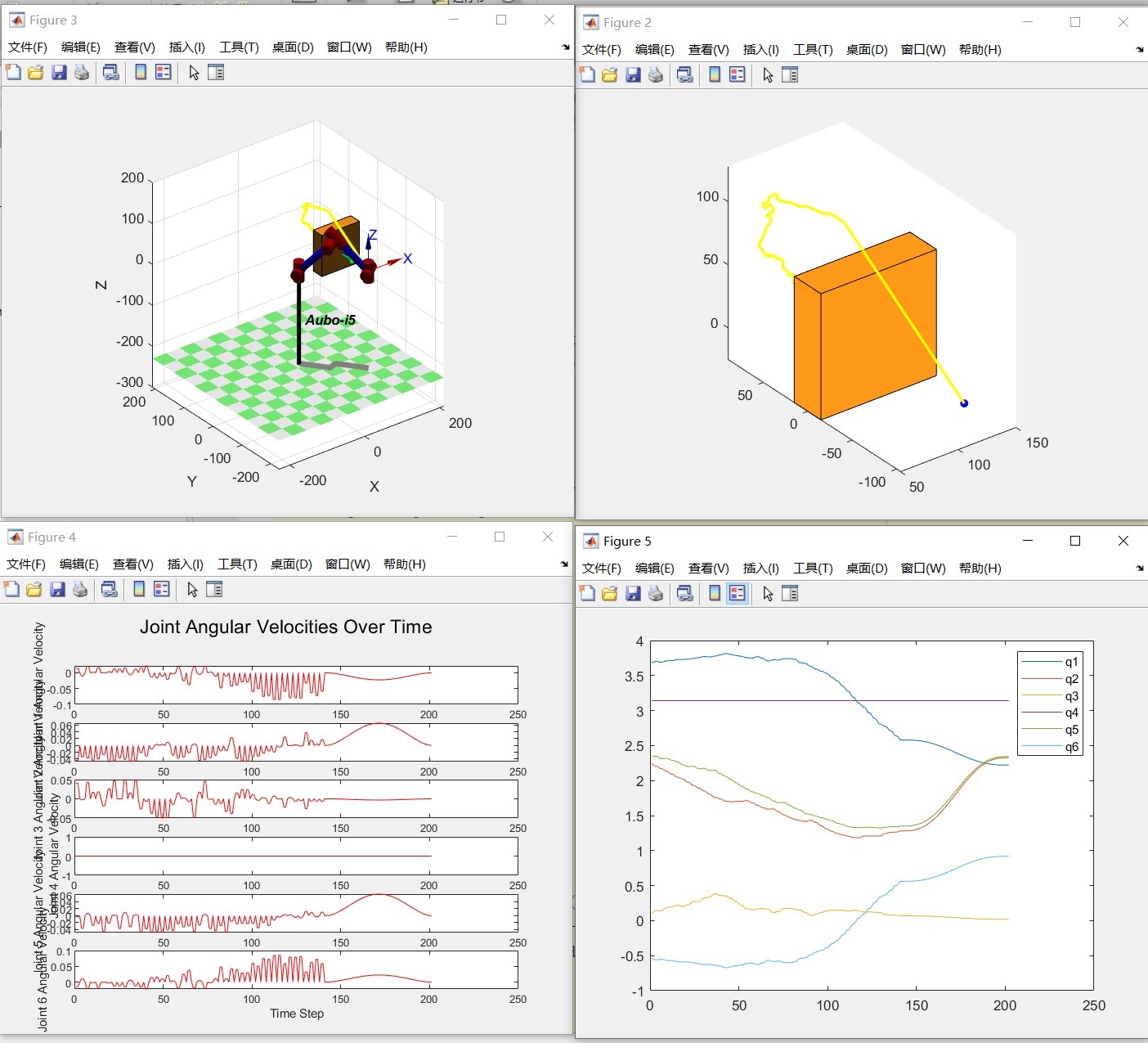
六自由度机械臂RRT路径规划算法梯形速度规划规划,实现机械臂避障。并绘制相关曲线:1.经过rrt算法规划得到的路径;2.关节角度变化曲线、关节速度曲线;3.机械臂避障动图。代码有详细注释,自己学习后进行了标注和改进即可在机器人运动控制领域,六自由度机械臂的路径规划与避障是关键问题。本文将探讨如何使用RRT(快速探索随机树)算法进行路径规划,并结合梯形速度规划实现机械臂避障,同时绘制相关曲线辅助分析
六自由度机械臂RRT路径规划算法梯形速度规划规划,实现机械臂避障。 并绘制相关曲线: 1.经过rrt算法规划得到的路径; 2.关节角度变化曲线、关节速度曲线; 3.机械臂避障动图。 代码有详细注释,自己学习后进行了标注和改进即可
在机器人运动控制领域,六自由度机械臂的路径规划与避障是关键问题。本文将探讨如何使用RRT(快速探索随机树)算法进行路径规划,并结合梯形速度规划实现机械臂避障,同时绘制相关曲线辅助分析。
RRT路径规划算法原理
RRT算法是一种基于采样的路径搜索算法,通过在状态空间中随机采样点,并将新采样点连接到树中最近的节点,逐步构建一棵搜索树,直到找到目标节点或满足一定条件。
六自由度机械臂RRT路径规划算法梯形速度规划规划,实现机械臂避障。 并绘制相关曲线: 1.经过rrt算法规划得到的路径; 2.关节角度变化曲线、关节速度曲线; 3.机械臂避障动图。 代码有详细注释,自己学习后进行了标注和改进即可
以下是简化的RRT算法Python代码示例(假设使用Python和numpy库):
import numpy as np
import random
# 定义节点类
class Node:
def __init__(self, position):
self.position = position
self.parent = None
# RRT算法主函数
def rrt(start, goal, obstacle_list, max_iter=1000):
tree = []
start_node = Node(start)
tree.append(start_node)
for i in range(max_iter):
# 随机采样
rand = np.array([random.uniform(-1, 1), random.uniform(-1, 1)])
nearest_node = min(tree, key=lambda node: np.linalg.norm(node.position - rand))
new_node = Node(nearest_node.position + (rand - nearest_node.position) * 0.1)
# 检查是否与障碍物碰撞
collision = False
for obs in obstacle_list:
if np.linalg.norm(new_node.position - obs) < 0.1:
collision = True
break
if not collision:
new_node.parent = nearest_node
tree.append(new_node)
# 检查是否接近目标
if np.linalg.norm(new_node.position - goal) < 0.1:
path = []
current = new_node
while current is not None:
path.append(current.position)
current = current.parent
return path[::-1]
return None
代码分析
- Node类:用于表示树中的节点,每个节点包含自身位置和父节点信息。
- rrt函数:主函数实现RRT算法。
start和goal分别是起始点和目标点,obstaclelist是障碍物列表。在每次迭代中,随机采样一个点rand,找到树中距离rand最近的节点nearestnode,并根据一定步长生成新节点newnode。然后检查newnode是否与障碍物碰撞,如果没有碰撞则将其加入树中,并检查是否接近目标。若接近目标,则通过回溯父节点得到路径。
梯形速度规划
梯形速度规划用于控制机械臂在运动过程中的速度变化,以实现平稳加速、匀速和减速。
# 梯形速度规划函数
def trapezoidal_profile(v_max, a, s):
# 计算加速阶段时间
t_acc = v_max / a
# 计算加速阶段位移
s_acc = 0.5 * a * t_acc * t_acc
# 计算匀速阶段位移
s_const = s - 2 * s_acc
# 计算匀速阶段时间
t_const = s_const / v_max if s_const > 0 else 0
# 计算总时间
t_total = 2 * t_acc + t_const
return t_acc, t_const, t_total
代码分析
trapezoidalprofile函数:输入最大速度vmax、加速度a和总位移s。首先计算加速阶段时间tacc和位移sacc,然后根据总位移计算匀速阶段位移sconst和时间tconst,最后得到总运动时间t_total。
实现机械臂避障及曲线绘制
结合上述算法,实现机械臂避障并绘制相关曲线。这里假设使用matplotlib绘制曲线,PIL库制作动图(实际应用中机械臂模型和动图绘制可能更复杂)。
import matplotlib.pyplot as plt
from PIL import Image, ImageDraw
# 假设这里有机械臂正逆运动学函数
def forward_kinematics(joint_angles):
# 简单模拟,实际需根据机械臂结构实现
return np.array([np.cos(joint_angles[0]), np.sin(joint_angles[0])])
def inverse_kinematics(position):
# 简单模拟,实际需根据机械臂结构实现
angle = np.arctan2(position[1], position[0])
return np.array([angle])
# 示例使用
start = np.array([0, 0])
goal = np.array([0.8, 0.8])
obstacle_list = [np.array([0.5, 0.5])]
# RRT路径规划
path = rrt(start, goal, obstacle_list)
# 假设机械臂关节角度根据路径通过逆运动学计算得到
joint_angles = []
for pos in path:
joint_angles.append(inverse_kinematics(pos))
joint_angles = np.array(joint_angles).flatten()
# 假设这里计算关节速度,简单模拟
joint_velocities = np.gradient(joint_angles)
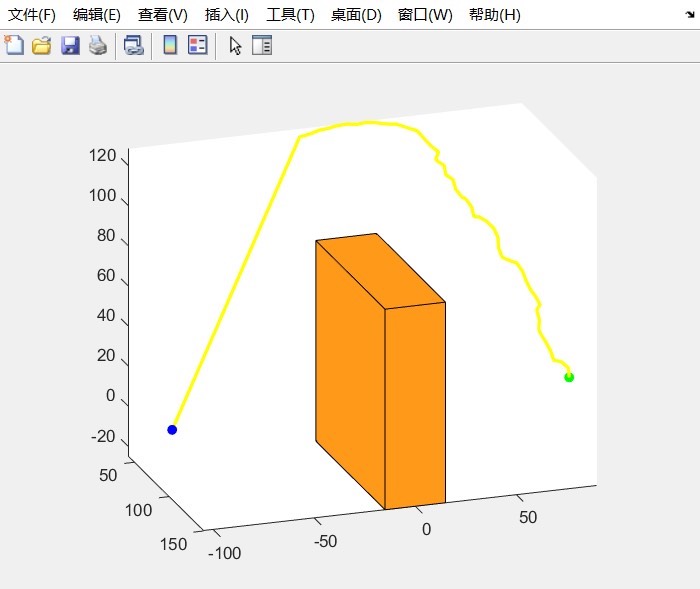
# 绘制RRT路径
plt.figure()
plt.plot([p[0] for p in path], [p[1] for p in path], '-o')
for obs in obstacle_list:
plt.plot(obs[0], obs[1], 'ro')
plt.title('RRT Path')
plt.xlabel('X')
plt.ylabel('Y')
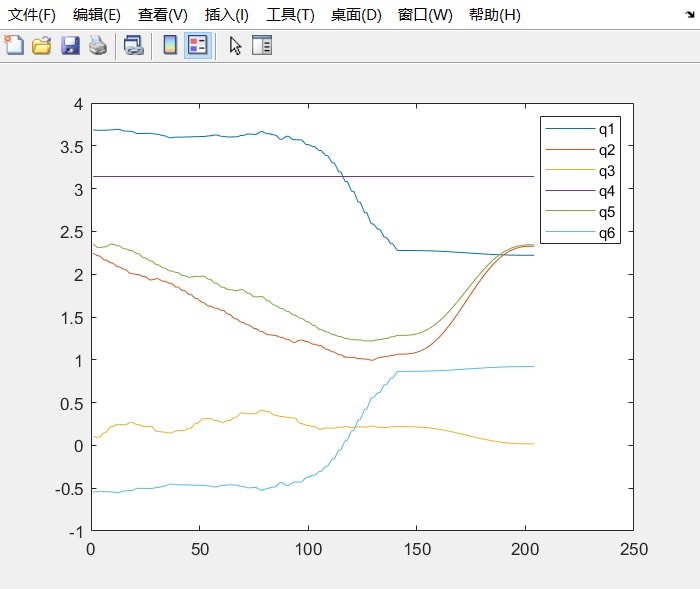
# 绘制关节角度变化曲线
plt.figure()
plt.plot(joint_angles)
plt.title('Joint Angles')
plt.xlabel('Time Step')
plt.ylabel('Angle (rad)')
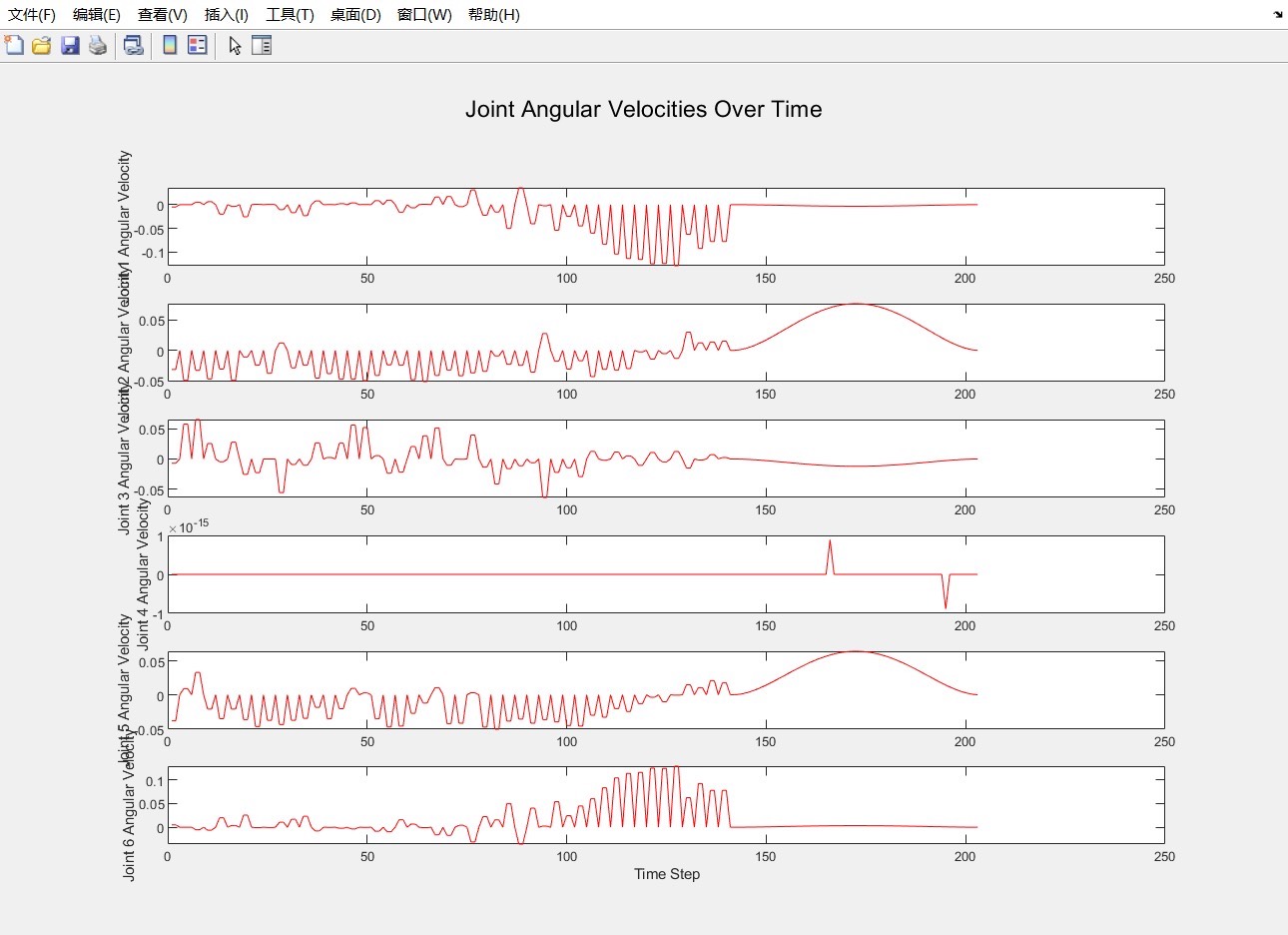
# 绘制关节速度变化曲线
plt.figure()
plt.plot(joint_velocities)
plt.title('Joint Velocities')
plt.xlabel('Time Step')
plt.ylabel('Velocity (rad/s)')
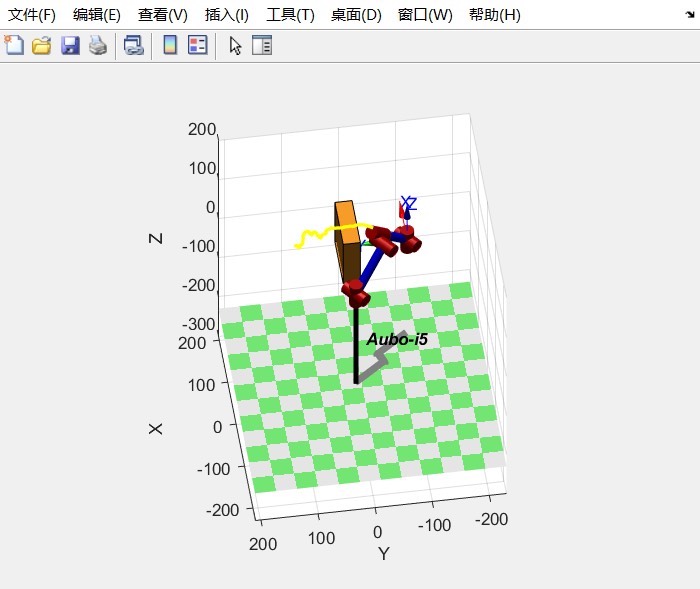
# 制作机械臂避障动图(简单模拟)
images = []
for i in range(len(path)):
img = Image.new('RGB', (400, 400), (255, 255, 255))
draw = ImageDraw.Draw(img)
for obs in obstacle_list:
draw.ellipse((obs[0] * 200 - 10, obs[1] * 200 - 10, obs[0] * 200 + 10, obs[1] * 200 + 10), fill='red')
end_point = (path[i][0] * 200, path[i][1] * 200)
draw.line((200, 200, end_point[0], end_point[1]), fill='blue', width=2)
images.append(img)
images[0].save('obstacle_avoidance.gif', save_all=True, append_images=images[1:], duration=200, loop=0)
代码分析
- 运动学函数模拟:
forwardkinematics和inversekinematics函数是简单模拟,实际需根据机械臂结构精确实现。 - 路径与关节角度计算:通过RRT算法得到路径后,假设使用逆运动学计算每个路径点对应的关节角度,并计算关节速度。
- 曲线绘制:使用
matplotlib分别绘制RRT路径、关节角度变化曲线和关节速度变化曲线。 - 动图制作:使用
PIL库简单模拟制作机械臂避障动图,在每个时间步绘制机械臂位置和障碍物。
通过以上步骤,我们实现了六自由度机械臂的RRT路径规划与梯形速度规划避障,并绘制了相关曲线和动图辅助理解。实际应用中,还需根据具体机械臂结构和控制需求进行进一步优化和调整。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐


 14
14 0
0- 0



 已为社区贡献7条内容
已为社区贡献7条内容

所有评论(0)