ICRA和IROS近十年的成果总结
智能范式:从模型驱动的专用自动化,转向数据驱动的通用具身智能,机器人的核心竞争力从“硬件精度”转向“智能泛化能力”。应用边界:从封闭工业场景的固定任务,转向开放动态环境的全场景覆盖,机器人从汽车产线的小众设备,变成了千行百业的通用基础设施。学术格局:从欧美单极主导,转向中美双雄并立、中国快速领跑,中国成为全球机器人技术创新与产业落地的核心增长极。
ICRA & IROS 近十年(2015-2025)成果总结
ICRA(IEEE国际机器人与自动化大会)与IROS(IEEE/RSJ国际智能机器人与系统大会)是全球机器人领域最具影响力的两大顶会,二者形成互补格局:ICRA更聚焦机器人底层理论、自动化控制、硬件设计与工业落地,偏基础硬科技;IROS更侧重智能算法、感知交互、多机协同与具身智能,偏系统级智能创新。
近十年,两大顶会完整见证并引领了全球机器人技术从「模型驱动的专用自动化」到「数据驱动的通用具身智能」的范式革命,其成果不仅是学术创新的风向标,更直接推动了机器人产业从汽车产线的小众应用,走向千行百业的规模化普及,完成了四次核心代际跃迁。
一、十年技术范式的三次核心迁移
第一阶段:2015-2018 几何与模型为主轴,数据驱动方法入场
这一阶段是传统机器人技术的成熟期,物理建模、几何方法、优化控制仍是顶会的绝对主流,同时深度学习开始从计算机视觉领域向机器人领域渗透,完成了数据驱动方法的早期验证。
- 核心成果:
- 接触与操作建模实现突破:ICRA 2016最佳论文提出平面滑动的凸多项式力-运动模型,建立了可解释、可辨识的机器人接触操作理论,成为工业机器人精密装配的核心理论基础。
- 数据驱动抓取开启规模化探索:ICRA 2016学生最佳论文完成5万次抓取、700小时机器人数据的自监督学习,首次证明大规模数据可显著提升机器人抓取的泛化能力,打破了传统手工建模的局限。
- 控制与规划体系全面成熟:模型预测控制(MPC)、轨迹优化(Collocation)方法在无人机、工业机器人领域广泛落地,成为机器人运动控制的行业标准;同时RRT*、A*等路径规划算法完成工程化优化,支撑移动机器人的规模化应用。
- 几何SLAM进入成熟期:以ORB-SLAM2、LIO-SAM为代表的激光/视觉几何SLAM方案在顶会集中爆发,解决了静态环境下机器人的高精度定位与建图问题,定位误差降至厘米级,成为移动机器人的核心标配技术。
- 阶段特征:技术核心是“让机器人在已知结构化环境中稳定完成预设任务”,机器人的泛化能力、动态环境适应能力仍有明显短板,学术创新仍以欧美团队为主导。
第二阶段:2019-2021 学习方法上位,Sim2Real成为核心刚需
这一阶段是机器人技术的智能化转型关键期,深度学习、强化学习全面进入机器人领域的核心赛道,顶会论文中学习类论文占比从不足20%提升至50%以上,核心解决了“仿真到现实的迁移”“真实场景数据稀缺”两大行业痛点。
- 核心成果:
- 强化学习实现工业级落地:ICRA 2019首次实现强化学习驱动的机械臂灵巧抓取,成功率突破80%;Google在ICRA 2018发布的QT-Opt算法,通过大规模强化学习实现了700+真实场景的机械臂抓取,成功率突破96%,证明了强化学习在真实机器人场景的落地价值。
- Sim2Real技术体系全面成熟:两大顶会集中爆发了仿真环境构建、域随机化、域适应相关成果,解决了仿真与现实的“现实鸿沟”,让机器人在仿真中完成90%的训练,再迁移到真实场景,大幅降低了机器人算法的开发成本与周期。
- 多机器人协同实现突破:IROS 2021提出多机器人通信-感知协同框架,解决了复杂无信号环境下的多机鲁棒性协同问题;分布式SLAM、集群任务分配、冲突避让算法实现千台级规模的验证,支撑了电商仓储场景的机器人集群规模化落地。
- 离线强化学习破局数据稀缺问题:顶会提出的BC、DT、Offline RL等算法,解决了真实机器人场景数据采集成本高、风险大的痛点,可利用历史离线数据完成策略优化,让学习方法从实验室走向工业场景。
- 阶段特征:技术核心从“预设任务的稳定执行”转向“未知场景的泛化适应”,机器人的动态环境适应能力、任务泛化能力实现质的飞跃,中国团队开始在顶会崭露头角,论文投稿量、录用量快速增长。
第三阶段:2022-2025 具身智能成为统一范式,大模型重构机器人技术体系
这一阶段是机器人技术的范式革命期,大语言模型、多模态大模型全面重构了机器人的技术架构,两大顶会全面聚焦具身智能,核心目标从“完成单一任务”转向“实现通用环境适应能力”,机器人技术从“自动化”正式进入“智能化”时代。
- 核心成果:
- 具身多模态大模型全面落地:ICRA 2023集中发布了RT-1、PaLM-E等里程碑式成果,首次将大语言模型与机器人感知、动作体系深度融合,实现了自然语言指令到机器人动作的端到端映射,让机器人可理解模糊指令、完成长时序复杂任务。
- 世界模型成为机器人学习的核心框架:两大顶会的相关论文实现爆发式增长,世界模型可让机器人构建环境的内在表征,预测动作带来的环境变化,实现“先想象、再执行”,大幅提升了机器人在未知场景的泛化能力,成为具身智能的核心底座。
- 人形机器人技术实现量产级突破:IROS 2025集中发布了双足机器人动态控制、直驱执行器、灵巧手相关成果,突破了双足机器人足球动态控制、复杂地形自适应行走等核心难题;视触觉集成灵巧手实现了穿针引线、叠衣、发牌等类人精细操作,打破了人形机器人“只能走、不能做”的瓶颈。
- 神经SLAM与动态环境感知实现颠覆式突破:以MoD-SLAM、DDN-SLAM为代表的神经隐式SLAM方案(ICRA/IROS 2025),实现了动态环境下的高精度定位与稠密建图,追踪误差较传统方法降低90%,解决了机器人在真实动态场景的长期自主运行难题。
- 阶段特征:技术核心从“单任务性能优化”转向“通用智能能力构建”,机器人的人机交互能力、任务泛化能力、长期自主运行能力实现指数级提升;中国团队实现从跟跑到领跑的跨越,2025年IROS落地杭州,中国大陆学者首次担任大会主席,中国团队的论文录用量、最佳论文提名量跃居全球第二。
二、六大核心技术领域的十年里程碑成果
1. 感知与SLAM技术:从几何定位到全域语义理解
这是十年间变化最彻底的技术领域,完成了三次核心升级:
- 2015-2018年:几何SLAM成熟期,激光SLAM、单目/双目视觉SLAM方案全面成熟,解决了静态结构化环境下的机器人定位与建图问题,代表成果包括ORB-SLAM2、LIO-SAM、VINS-Mono,成为移动机器人的标配技术。
- 2019-2021年:多模态与动态SLAM突破期,事件相机、毫米波雷达、IMU多传感器融合方案成为顶会主流,解决了弱光、高速、遮挡场景的鲁棒性感知问题;动态SLAM算法可剔除动态物体干扰,实现了人流密集场景的长期稳定运行。
- 2022-2025年:神经隐式SLAM与语义感知爆发期,NeRF、占用网络(OccNet)与SLAM深度融合,实现了动态环境的稠密三维重建与语义级场景理解;IROS 2025提出的DRACO-SLAM2实现了水下分布式声学SLAM,ICRA 2025的相关成果实现了深空、地下极端环境的鲁棒定位,彻底拓展了机器人的感知边界。
2. 运动控制与规划:从优化控制到端到端智能决策
十年间,机器人的运动能力从“精准重复”升级为“动态自适应”,完成了从工业场景到全场景的跨越:
- 2015-2018年:传统优化控制体系成熟,MPC、LQR、非线性轨迹优化成为机器人控制的行业标准,在工业机器人、无人机领域实现了微米级的控制精度;足式机器人实现了稳定平地行走,波士顿动力Atlas在ICRA展示了后空翻等动态动作,但仍依赖手工调参的传统控制方案。
- 2019-2021年:学习控制规模化落地,强化学习、模仿学习在足式机器人、机械臂控制领域全面突破,IROS 2020的RMA算法让四足机器人实现了复杂地形的自适应行走,无需人工调参即可适配草地、台阶、斜坡等未知场景;模仿学习+规划的融合方案,让工业机器人的装配效率提升300%,大幅降低了部署成本。
- 2022-2025年:端到端规划与人形控制突破,大模型+世界模型重构了机器人规划体系,实现了从视觉感知到动作输出的端到端规划,无需人工设计中间模块,泛化能力实现质的飞跃;IROS 2025的相关成果突破了双足机器人动态轨迹规划,实现了足球运动中的跑位、踢球、避障全流程自主控制;人形机器人实现了直膝行走、上下楼梯、摔倒自主起身等类人动作,控制精度与鲁棒性达到量产级要求。
3. 机器人操作与灵巧手:从粗放抓取到类人精细操作
十年间,机器人的操作能力从“能抓起来”升级为“能做精细活”,是机器人从工业走向服务场景的核心突破:
- 2015-2018年:接触建模与抓取基础突破,顶会成果集中在机器人接触力学建模、抓取姿态规划领域,解决了结构化场景下的固定物体抓取问题,工业机器人实现了稳定的码垛、上下料操作,但泛化能力弱,无法适配未知物体。
- 2019-2021年:数据驱动的抓取泛化突破,自监督学习、强化学习让机器人实现了未知物体的通用抓取,ICRA 2019的相关成果实现了1000+未知物体的抓取,成功率突破90%;力控技术全面成熟,协作机器人实现了柔顺装配、打磨等精细操作,力控精度达到±0.5N。
- 2022-2025年:灵巧手与大模型驱动的精细操作爆发,视触觉融合灵巧手成为顶会主流,IROS 2025展示了指尖集成视触觉传感器的灵巧手,实现了发牌、穿针引线、叠衣服等类人精细操作;清华大学AIR团队的X-VLA模型(IROS 2025竞赛冠军)实现了120分钟无辅助自主叠衣,突破了 deformable物体操作的行业难题;大模型让机器人可理解人类的操作意图,自主完成复杂的家务、装配任务,实现了从“会操作”到“懂操作”的跨越。
4. 机器人学习:从深度强化学习到具身大模型统一范式
这是十年间最具颠覆性的技术领域,彻底重构了机器人的智能生成逻辑:
- 2015-2018年:深度强化学习入场验证,DDPG、TD3、SAC等深度强化学习算法在仿真环境中实现了机器人控制任务的突破,但真实场景落地困难,Sim2Real迁移效果差,仅能完成简单的抓取、导航任务。
- 2019-2021年:Sim2Real与离线学习成熟,域随机化、域适应技术让仿真到现实的迁移成功率突破90%;离线强化学习、行为克隆算法解决了真实场景数据稀缺的问题,让学习方法可利用工厂历史数据完成策略优化,正式进入工业落地阶段;多任务学习、元学习让机器人实现了跨任务的快速适配,泛化能力大幅提升。
- 2022-2025年:具身大模型成为统一范式,PaLM-E、RT-2、GPT-4V等多模态大模型与机器人体系深度融合,解决了机器人的任务规划、语义理解、长时序推理难题,让机器人从“只会执行指令”升级为“能理解任务、自主拆解步骤、处理突发异常”;世界模型成为机器人学习的核心框架,让机器人具备了环境预判、风险规避的能力,彻底打破了传统模块化架构的泛化瓶颈。
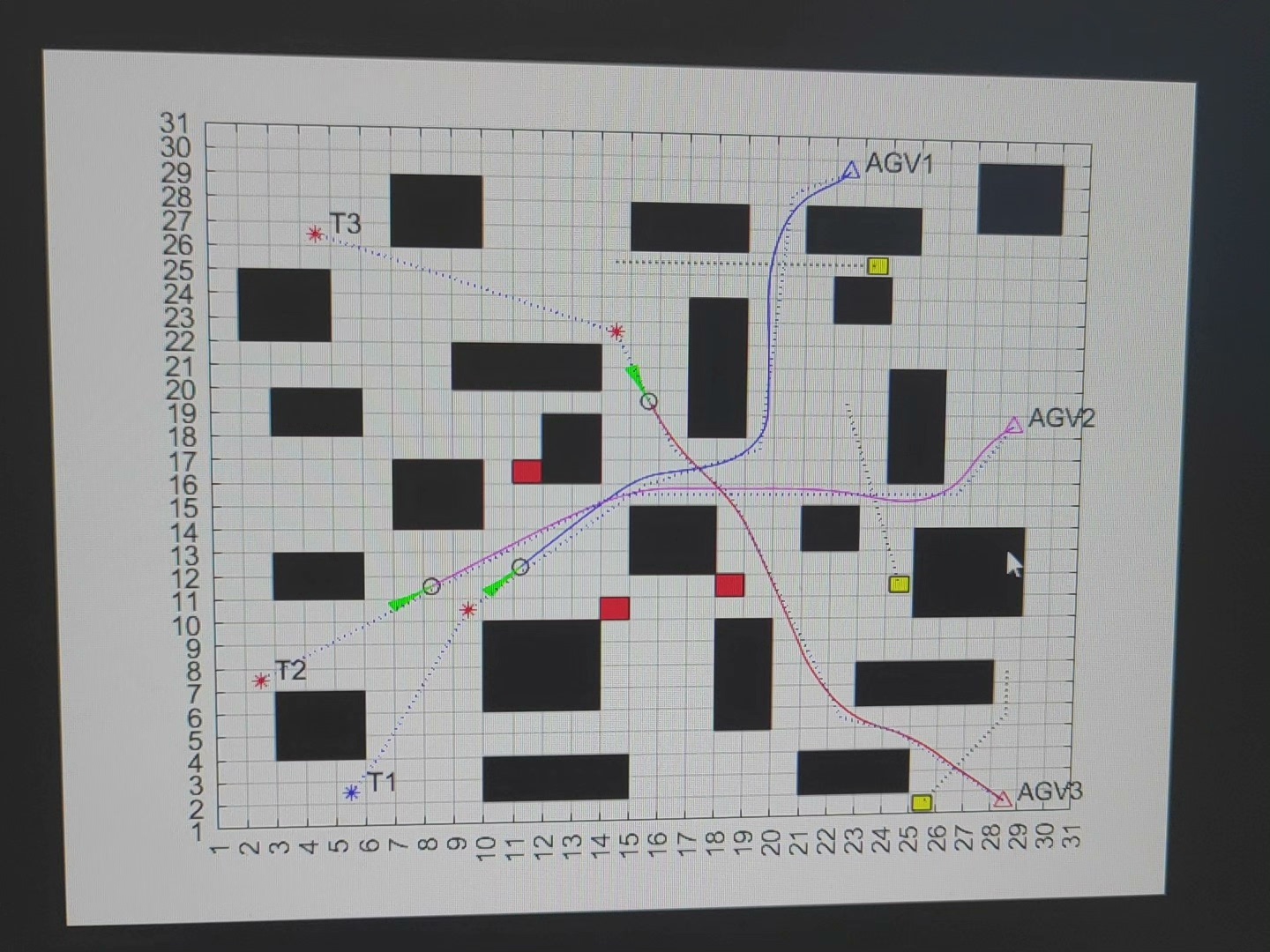
5. 多机器人系统:从单机运行到万级集群全域协同
十年间,机器人从“单打独斗”升级为“群体协同”,支撑了物流、矿山、港口等场景的规模化应用:
- 2015-2018年:小规模集群调度成熟,实现了数十台同类型AGV的集中调度与冲突避让,核心应用于电商仓储的分拣场景,采用集中式调度架构,鲁棒性差,无法适配无信号环境。
- 2019-2021年:分布式协同框架突破,IROS 2021提出的多机器人通信-感知协同框架,实现了无中心节点的分布式协同,解决了复杂环境下的集群鲁棒性问题;分布式SLAM、协同定位技术让多机器人可在无GPS、无先验地图的环境中,协同完成定位与建图,适配了灾害救援、地下勘探等极端场景。
- 2022-2025年:万级集群全域协同落地,顶会成果实现了跨品类、跨域机器人的协同调度,可同时调度AMR、机械臂、无人机、无人车等多类型机器人,完成复杂的物流、巡检、救援任务;IROS 2025的相关成果实现了水下多机器人分布式协同作业,ICRA 2025的成果实现了矿山场景千台级无人设备的全域协同,集群作业效率较人工提升5倍以上。
6. 硬件与特殊场景机器人:从工业专用到全场景覆盖
十年间,机器人本体硬件实现了从“大型、笨重、专用”到“小型、轻量化、通用化”的跨越,彻底拓展了机器人的应用边界:
- 2015-2018年:工业机器人本体成熟,六轴工业机器人、SCARA机器人的精度、寿命、负载能力达到国际先进水平,核心应用于汽车、3C产线;协作机器人实现了人机协同安全控制,负载能力从3kg拓展至20kg,开始进入3C、医疗场景。
- 2019-2021年:足式机器人与特种机器人爆发,四足机器人实现了商业化落地,可完成巡检、安防、救援等任务,适应复杂地形;水下、空中、防爆、消毒等特种机器人在顶会集中爆发,在疫情、灾害救援、矿山勘探等场景实现了规模化应用。
- 2022-2025年:人形机器人与微型机器人突破,人形机器人本体实现量产级技术突破,滚柱丝杠执行器、直驱电机的性能、寿命、成本达到量产要求,整机自由度突破40个,可适配工业、服务等多场景;ICRA 2025发布了78.4mg的TinySense传感器套件,首次实现1g以下亚克级微型机器人的自主悬停,功耗仅15mW,可应用于灾害救援、体内医疗、环境监测等场景,彻底拓展了机器人的物理边界。
三、中国学术力量的十年崛起
近十年,两大顶会见证了中国机器人学术力量从跟跑到并跑、再到领跑的完整历程,实现了三大里程碑式突破:
- 论文规模与质量的全面跃升:2015年,中国团队在ICRA/IROS的论文录用占比不足10%,且以合作论文为主;2025年IROS,中国团队的论文录用量占比超过35%,仅次于美国,位居全球第二,最佳论文提名、最佳学生论文数量实现爆发式增长,在SLAM、多机协同、具身智能领域的成果达到全球领先水平。
- 学术话语权的根本性突破:2025年IROS落地中国杭州,上海交通大学王贺升教授成为首位担任IROS大会主席的中国大陆学者,这是中国机器人领域的里程碑事件;同时,中国学者开始担任ICRA/IROS领域主席、程序委员会委员的核心职务,深度参与顶会的规则制定,从学术成果的参与者,转变为规则的制定者。
- 产学研一体化的全球领先:中国团队的顶会成果不再局限于实验室验证,而是快速实现产业落地,宇树科技、大疆、旷视、美团等企业的研发团队持续在ICRA/IROS发布成果,实现了“学术创新-产业落地-数据反哺学术”的正向循环;在仓储物流、巡检安防、服务机器人等领域,中国的学术成果转化效率、产业落地规模均位居全球第一。
四、十年演进的核心总结与未来趋势
核心总结
近十年,ICRA与IROS完整推动了机器人技术的三大本质转变:
- 智能范式:从模型驱动的专用自动化,转向数据驱动的通用具身智能,机器人的核心竞争力从“硬件精度”转向“智能泛化能力”。
- 应用边界:从封闭工业场景的固定任务,转向开放动态环境的全场景覆盖,机器人从汽车产线的小众设备,变成了千行百业的通用基础设施。
- 学术格局:从欧美单极主导,转向中美双雄并立、中国快速领跑,中国成为全球机器人技术创新与产业落地的核心增长极。
未来趋势(2025-2030)
- 具身大模型成为机器人的标准配置,端侧轻量化具身模型全面落地,实现机器人的自然语言交互、自主任务规划、全场景泛化适配,真正实现“软件定义机器人”。
- 人形机器人技术全面成熟,双足运动控制、灵巧手操作、人机安全协同技术实现量产级突破,人形机器人进入工业、服务、家庭场景,成为下一代通用智能终端。
- 空天地一体化机器人集群体系成型,跨域多机器人协同技术全面落地,实现低空无人机、地面机器人、海洋机器人、太空机器人的全域协同作业,拓展人类的作业边界。
- 中国将主导全球机器人技术标准,中国团队在ICRA/IROS的学术影响力将持续提升,在具身智能、多机协同、人形机器人领域的成果将成为全球行业标准,实现从跟跑到全球领跑的全面跨越。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐
 3
3 0
0- 0



 已为社区贡献363条内容
已为社区贡献363条内容

所有评论(0)