六自由度机械臂的 RRT 避障算法仿真之旅
机械臂仿真,RRT避障算法,六自由度机械臂机械臂matlab仿真,RRT避障算法,六自由度机械臂避障算法,RRT避障算法,避障仿真,无机械臂关节碰撞机械臂 机器人 DH参数 运动学 正逆解urdf建模 轨迹规划在机器人领域,六自由度机械臂可是个明星选手,它能在三维空间里灵活舞动,完成各种复杂任务。但要是周围有障碍物,它就必须学会巧妙避开,这时候 RRT 避障算法就派上用场啦。今天咱就用 MATLA
机械臂仿真,RRT避障算法,六自由度机械臂 机械臂matlab仿真,RRT避障算法,六自由度机械臂避障算法,RRT避障算法,避障仿真,无机械臂关节碰撞机械臂 机器人 DH参数 运动学 正逆解 urdf建模 轨迹规划
在机器人领域,六自由度机械臂可是个明星选手,它能在三维空间里灵活舞动,完成各种复杂任务。但要是周围有障碍物,它就必须学会巧妙避开,这时候 RRT 避障算法就派上用场啦。今天咱就用 MATLAB 来对六自由度机械臂进行仿真,看看 RRT 算法是怎么让机械臂安全避障的。
前期准备:机械臂运动学基础
要让机械臂动起来,首先得了解它的运动学。这里我们用 DH 参数法来描述机械臂的结构。DH 参数是一组用来定义机器人连杆之间相对位置和姿态的参数。下面是一段简单的 MATLAB 代码,用于根据 DH 参数创建机械臂模型:
% 定义六自由度机械臂的 DH 参数
L1 = Link([0 0 0 pi/2], 'standard');
L2 = Link([0 0.4 0 0], 'standard');
L3 = Link([0 0.3 0 pi/2], 'standard');
L4 = Link([0 0 0 -pi/2], 'standard');
L5 = Link([0 0 0 pi/2], 'standard');
L6 = Link([0 0.2 0 0], 'standard');
% 创建机械臂对象
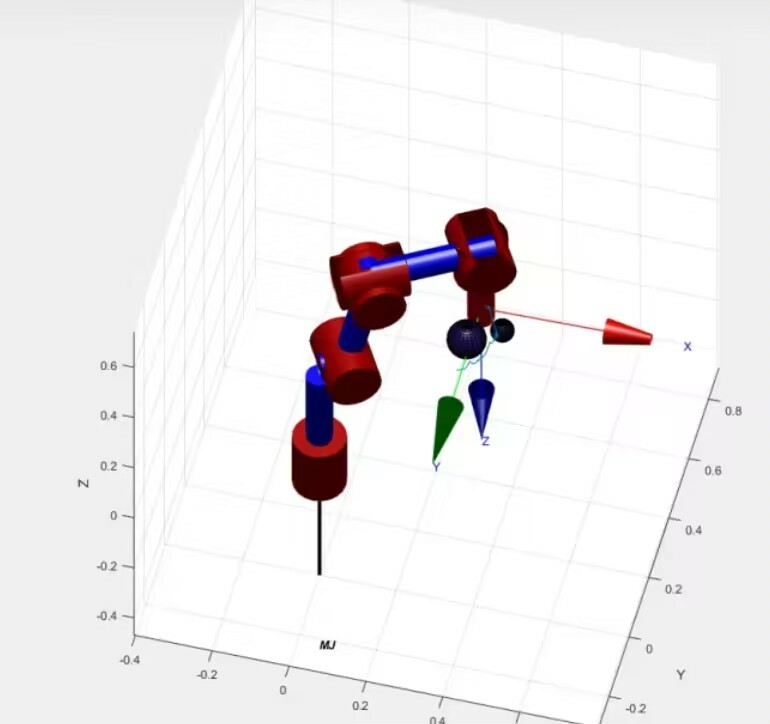
robot = SerialLink([L1 L2 L3 L4 L5 L6], 'name', '6DOF_Robot');代码分析:这里我们依次定义了六个连杆的 DH 参数,然后使用 SerialLink 函数创建了一个六自由度机械臂对象。每个 Link 函数里的参数分别是连杆的扭转角、连杆长度、连杆偏移和关节角。这样我们就有了一个机械臂的模型框架。
有了模型,还得会算它的正逆运动学。正运动学就是根据关节角算出机械臂末端执行器的位置和姿态,逆运动学则相反,根据末端执行器的位置和姿态算出各个关节角。下面是正运动学的代码:
% 定义关节角
q = [0 pi/6 pi/4 pi/3 pi/2 pi/6];
% 计算正运动学
T = robot.fkine(q);
disp(T);代码分析:fkine 是 SerialLink 对象的一个方法,用于计算正运动学。我们先定义了一组关节角 q,然后调用 fkine 方法得到末端执行器的齐次变换矩阵 T,最后把这个矩阵显示出来。
URDF 建模
除了用 MATLAB 模型,我们还可以用 URDF(Unified Robot Description Format)来建模。URDF 是一种 XML 格式的文件,用于描述机器人的结构和动力学特性。虽然这里我们主要用 MATLAB 仿真,但了解 URDF 建模也很有必要。一个简单的 URDF 文件示例如下:
<?xml version="1.0"?>
<robot name="6DOF_Robot">
<link name="base_link">
<visual>
<geometry>
<box size="0.1 0.1 0.1"/>
</geometry>
</visual>
</link>
<!-- 其他连杆和关节定义 -->
</robot>这个文件定义了机械臂的基础连杆,后面还可以继续添加其他连杆和关节的定义。
RRT 避障算法登场
RRT(Rapidly-exploring Random Trees)算法是一种用于路径规划的算法,它通过随机采样来快速探索环境,生成一棵搜索树,从而找到一条从起点到终点的路径。下面是一个简化的 RRT 算法的 MATLAB 代码:
% 初始化起点和终点
start = [0 0 0 0 0 0];
goal = [pi/2 pi/3 pi/4 pi/5 pi/6 pi/7];
% 初始化树
tree = [start; zeros(0, length(start))];
% 迭代次数
max_iter = 1000;
for i = 1:max_iter
% 随机采样一个点
rand_point = rand(1, length(start)) * 2 * pi - pi;
% 找到树中距离随机点最近的节点
[~, nearest_index] = min(sum((tree - repmat(rand_point, size(tree, 1), 1)).^2, 2));
nearest_node = tree(nearest_index, :);
% 生成一个新节点
new_node = nearest_node + 0.1 * (rand_point - nearest_node);
% 检查新节点是否与障碍物碰撞
if ~is_collision(new_node)
tree = [tree; new_node];
% 检查是否到达目标点
if norm(new_node - goal) < 0.1
break;
end
end
end代码分析:首先我们初始化了起点和终点,然后创建了一个树,树的第一个节点就是起点。在每次迭代中,我们随机采样一个点,找到树中距离这个随机点最近的节点,然后从这个最近节点向随机点扩展一定距离得到一个新节点。接着检查新节点是否与障碍物碰撞,如果不碰撞就把新节点加入树中。如果新节点接近目标点,就停止迭代。
机械臂仿真,RRT避障算法,六自由度机械臂 机械臂matlab仿真,RRT避障算法,六自由度机械臂避障算法,RRT避障算法,避障仿真,无机械臂关节碰撞机械臂 机器人 DH参数 运动学 正逆解 urdf建模 轨迹规划
这里的 is_collision 函数需要我们自己实现,用于检查关节是否与障碍物碰撞。比如可以根据机械臂的运动学模型和障碍物的位置信息来判断:
function collision = is_collision(q)
% 假设障碍物的位置
obstacle_pos = [0.5 0.5 0.5];
% 计算机械臂末端执行器的位置
T = robot.fkine(q);
end_effector_pos = T(1:3, 4);
% 检查是否碰撞
if norm(end_effector_pos - obstacle_pos) < 0.1
collision = true;
else
collision = false;
end
end代码分析:这个函数接受关节角 q 作为输入,计算出末端执行器的位置,然后检查这个位置是否接近障碍物的位置。如果接近就认为发生了碰撞。
轨迹规划与仿真
有了 RRT 算法找到的路径,我们还需要进行轨迹规划,让机械臂平滑地从起点移动到终点。可以使用 MATLAB 的 jtraj 函数来生成关节轨迹:
% 提取路径上的节点
path = tree;
% 生成关节轨迹
t = linspace(0, 10, size(path, 1));
q_traj = jtraj(path(1, :), path(end, :), t);
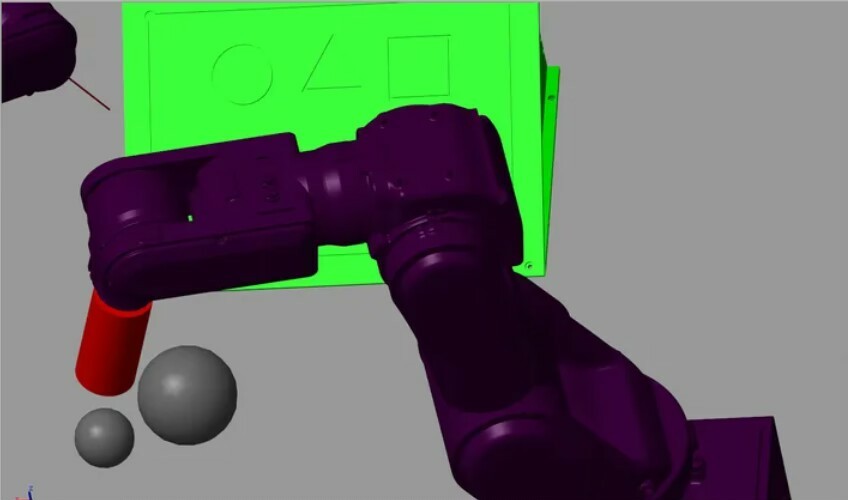
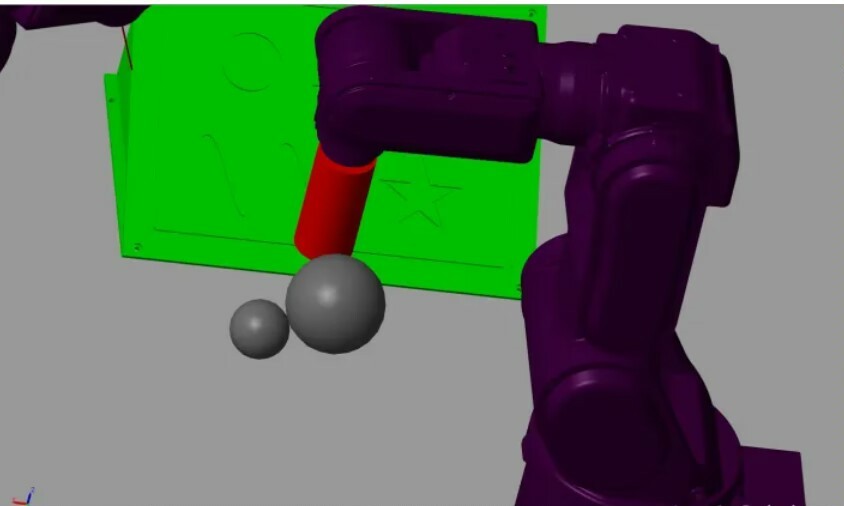
% 仿真
figure;
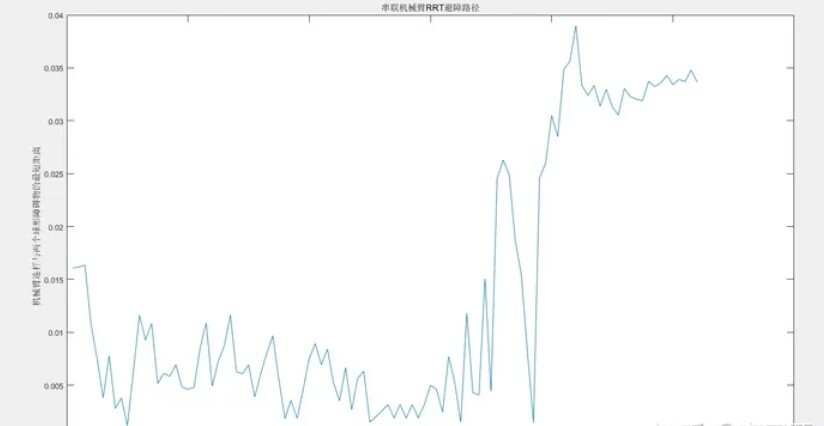
robot.plot(q_traj);代码分析:jtraj 函数根据起点和终点以及时间向量 t 生成平滑的关节轨迹。最后使用 plot 方法对机械臂的运动进行仿真,我们就能看到机械臂在避开障碍物的情况下从起点移动到终点啦。
通过以上步骤,我们完成了六自由度机械臂的 RRT 避障算法仿真。从机械臂的运动学建模,到 RRT 算法的实现,再到轨迹规划和仿真,每一步都充满了乐趣和挑战。希望这篇文章能让你对机械臂仿真和避障算法有更深入的了解。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐


 7
7 0
0- 0



 已为社区贡献5条内容
已为社区贡献5条内容

所有评论(0)