【路径规划】基于RRT算法在未知环境中应对不可预测障碍的实时路径重规划附matlab代码
在机器人导航、无人机飞行等诸多应用场景中,智能体常常需要在未知环境中自主规划路径以抵达目标位置。然而,现实环境复杂多变,随时可能出现不可预测的障碍,这就要求智能体具备实时路径重规划能力,以确保任务顺利进行。快速探索随机树(RRT)算法因其能够在复杂环境中快速搜索路径的特性,成为解决此类问题的常用方法之一。通过对 RRT 算法的优化与扩展,可以实现智能体在未知环境中面对不可预测障碍时的高效实时路径重
✅作者简介:热爱科研的Matlab仿真开发者,擅长毕业设计辅导、数学建模、数据处理、建模仿真、程序设计、完整代码获取、论文复现及科研仿真。
🍎 往期回顾关注个人主页:Matlab科研工作室
👇 关注我领取海量matlab电子书和数学建模资料
🍊个人信条:格物致知,完整Matlab代码获取及仿真咨询内容私信。
🔥 内容介绍
一、引言
在机器人导航、无人机飞行等诸多应用场景中,智能体常常需要在未知环境中自主规划路径以抵达目标位置。然而,现实环境复杂多变,随时可能出现不可预测的障碍,这就要求智能体具备实时路径重规划能力,以确保任务顺利进行。快速探索随机树(RRT)算法因其能够在复杂环境中快速搜索路径的特性,成为解决此类问题的常用方法之一。通过对 RRT 算法的优化与扩展,可以实现智能体在未知环境中面对不可预测障碍时的高效实时路径重规划。
二、RRT 算法基础
三、应对不可预测障碍的挑战与改进思路
(一)挑战
-
实时性要求:不可预测障碍的出现意味着必须在短时间内重新规划路径,以避免碰撞,这对算法的计算速度提出了很高要求。
-
信息不完整性:由于环境未知,在障碍出现前,智能体对周围空间的信息掌握有限,需要在有限信息下快速做出路径调整决策。
-
路径质量与效率平衡:既要快速找到新路径绕过障碍,又要保证新路径的质量,避免生成过于迂回或复杂的路径,影响智能体的移动效率。
(二)改进思路
-
增量式搜索:在检测到新障碍后,不重新构建整棵树,而是基于现有的 RRT 树进行增量扩展。通过局部搜索的方式,快速在树的局部区域找到绕过障碍的路径,减少计算量,满足实时性要求。
-
启发式引导:引入启发式信息,如目标方向引导,使搜索更有针对性。在生成新节点时,优先向靠近目标的方向扩展,有助于快速找到高质量的路径,平衡路径质量与效率。
-
多分辨率搜索:采用多分辨率策略,在障碍附近使用高分辨率进行精细搜索,确保准确绕过障碍;在远离障碍区域使用低分辨率以加快搜索速度,提高整体搜索效率。
四、基于 RRT 的实时路径重规划算法实现
(一)算法框架
-
障碍检测:智能体通过传感器(如激光雷达、摄像头等)实时感知环境,当检测到不可预测障碍时,标记障碍位置及范围。
-
局部路径重规划:基于已有的 RRT 树,以检测到的障碍为中心,确定一个局部搜索区域。在该区域内,利用增量式搜索策略,从与障碍最近的树节点开始扩展。通过启发式引导,优先向靠近目标方向生成新节点,并进行碰撞检测。若找到绕过障碍且通向目标的路径,则停止搜索,更新路径。
-
全局路径优化:对局部重规划得到的路径进行全局优化,去除不必要的迂回,使路径更加平滑和高效。可以采用路径简化算法,如 Douglas - Peucker 算法,对路径点进行筛选,保留关键节点,简化路径。
(二)关键步骤
-
局部搜索区域确定:根据障碍的位置和大小,以及智能体的运动能力,确定一个合理的局部搜索区域。例如,以障碍中心为圆心,以一定距离为半径的圆形区域作为局部搜索区域。
-
增量式扩展:从局部搜索区域内与障碍最近的树节点开始,按照一定步长和方向生成新节点。为提高搜索效率,采用启发式函数 h(q) ,如计算节点 q 到目标点的直线距离,优先选择使 h(q) 减小的方向生成新节点。
-
碰撞检测优化:为加快碰撞检测速度,采用层次包围盒(AABB)等方法对障碍和智能体进行建模。在检测新节点是否碰撞时,先进行包围盒之间的快速碰撞检测,若不碰撞再进行精确的几何碰撞检测,减少计算量。
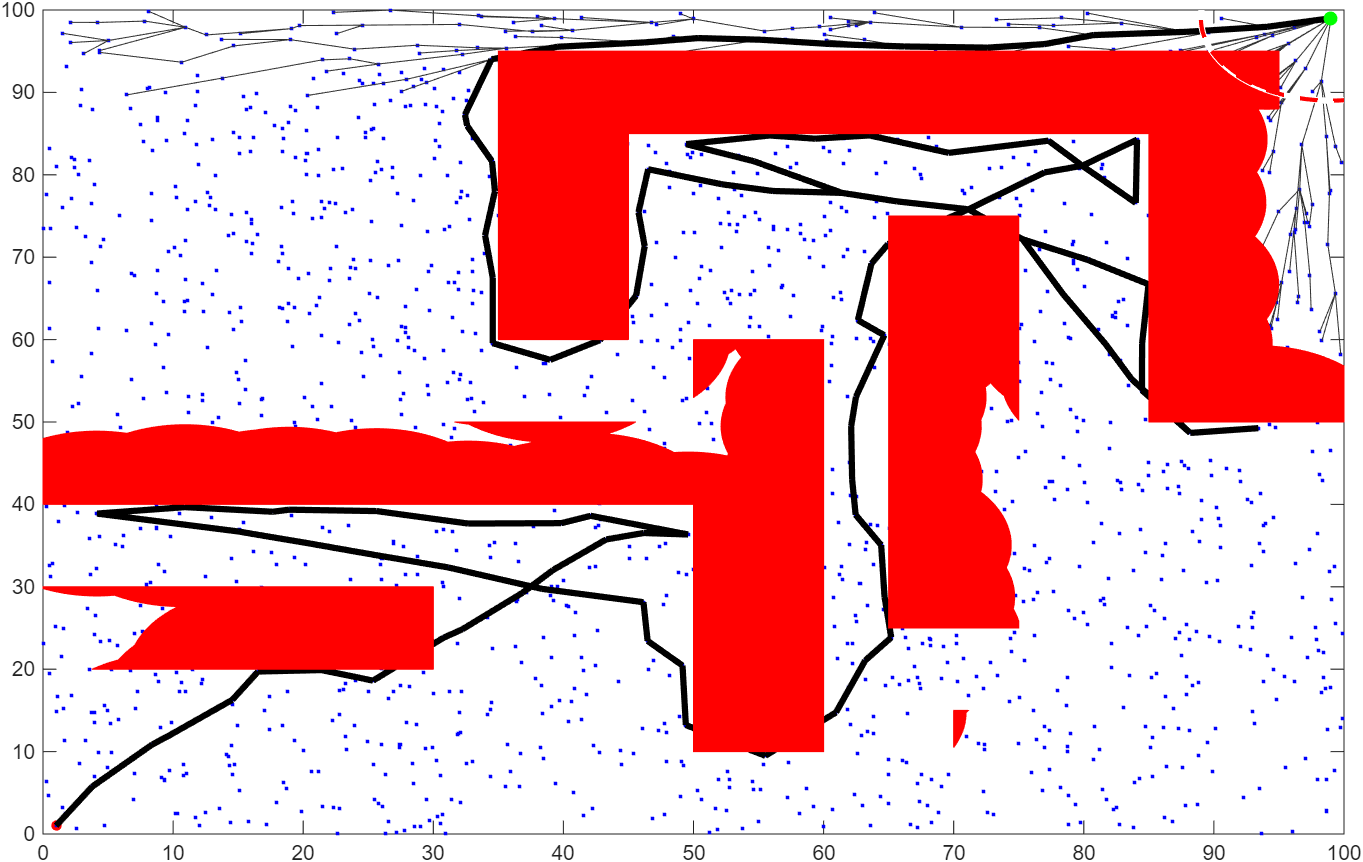
⛳️ 运行结果
📣 部分代码
global node_pos parent edge_wt cost_goal neighbours line_handles rhs r_radius o_nodes discovered_obstacles video_name;
global goal_handles children start_idx temp_edge_wt queue delta curr_node obstacle_cost filename file_index;
start = [1 1]; goal = [99 99]; epsilon = 5; delta = 0; ball_radius = (8)^2;
filename = 'RRTx_Map1_'; file_index = 1; sample_frame = 60;
video_name = 'RRTx_Map1';
samples = 10000;
node_pos = NaN(samples,2); parent = NaN(samples,1); edge_wt = cell(samples,1);
neighbours = cell(samples,1); cost_goal = Inf(samples,1); rhs = Inf(samples,1);
children = cell(samples,1); goal_handles = gobjects(samples,1); queue = Inf(samples,3);
rng(1);
figure,plot(start(1),start(2),'r.','MarkerSize',15);
hold on;
plot(goal(1),goal(2),'g.','MarkerSize',15);
h = gca; h.XLim = [0 100]; h.YLim = [0 100];
🔗 参考文献
![]()
🎈 部分理论引用网络文献,若有侵权联系博主删除
🏆团队擅长辅导定制多种毕业课题和科研领域
MATLAB仿真,助力毕业科研梦:
🌈 各类智能优化算法改进及应用
生产调度、经济调度、装配线调度、充电优化、车间调度、发车优化、水库调度、三维装箱、物流选址、货位优化、公交排班优化、充电桩布局优化、车间布局优化、集装箱船配载优化、水泵组合优化、解医疗资源分配优化、设施布局优化、可视域基站和无人机选址优化、背包问题、 风电场布局、时隙分配优化、 最佳分布式发电单元分配、多阶段管道维修、 工厂-中心-需求点三级选址问题、 应急生活物质配送中心选址、 基站选址、 道路灯柱布置、 枢纽节点部署、 输电线路台风监测装置、 集装箱调度、 机组优化、 投资优化组合、云服务器组合优化、 天线线性阵列分布优化、CVRP问题、VRPPD问题、多中心VRP问题、多层网络的VRP问题、多中心多车型的VRP问题、 动态VRP问题、双层车辆路径规划(2E-VRP)、充电车辆路径规划(EVRP)、油电混合车辆路径规划、混合流水车间问题、 订单拆分调度问题、 公交车的调度排班优化问题、航班摆渡车辆调度问题、选址路径规划问题、港口调度、港口岸桥调度、停机位分配、机场航班调度、泄漏源定位
🌈 机器学习和深度学习时序、回归、分类、聚类和降维
2.1 bp时序、回归预测和分类
2.2 ENS声神经网络时序、回归预测和分类
2.3 SVM/CNN-SVM/LSSVM/RVM支持向量机系列时序、回归预测和分类
2.4 CNN|TCN|GCN卷积神经网络系列时序、回归预测和分类
2.5 ELM/KELM/RELM/DELM极限学习机系列时序、回归预测和分类
2.6 GRU/Bi-GRU/CNN-GRU/CNN-BiGRU门控神经网络时序、回归预测和分类
2.7 ELMAN递归神经网络时序、回归\预测和分类
2.8 LSTM/BiLSTM/CNN-LSTM/CNN-BiLSTM/长短记忆神经网络系列时序、回归预测和分类
2.9 RBF径向基神经网络时序、回归预测和分类
2.10 DBN深度置信网络时序、回归预测和分类
2.11 FNN模糊神经网络时序、回归预测
2.12 RF随机森林时序、回归预测和分类
2.13 BLS宽度学习时序、回归预测和分类
2.14 PNN脉冲神经网络分类
2.15 模糊小波神经网络预测和分类
2.16 时序、回归预测和分类
2.17 时序、回归预测预测和分类
2.18 XGBOOST集成学习时序、回归预测预测和分类
2.19 Transform各类组合时序、回归预测预测和分类
方向涵盖风电预测、光伏预测、电池寿命预测、辐射源识别、交通流预测、负荷预测、股价预测、PM2.5浓度预测、电池健康状态预测、用电量预测、水体光学参数反演、NLOS信号识别、地铁停车精准预测、变压器故障诊断
🌈图像处理方面
图像识别、图像分割、图像检测、图像隐藏、图像配准、图像拼接、图像融合、图像增强、图像压缩感知
🌈 路径规划方面
旅行商问题(TSP)、车辆路径问题(VRP、MVRP、CVRP、VRPTW等)、无人机三维路径规划、无人机协同、无人机编队、机器人路径规划、栅格地图路径规划、多式联运运输问题、 充电车辆路径规划(EVRP)、 双层车辆路径规划(2E-VRP)、 油电混合车辆路径规划、 船舶航迹规划、 全路径规划规划、 仓储巡逻
🌈 无人机应用方面
无人机路径规划、无人机控制、无人机编队、无人机协同、无人机任务分配、无人机安全通信轨迹在线优化、车辆协同无人机路径规划
🌈 通信方面
传感器部署优化、通信协议优化、路由优化、目标定位优化、Dv-Hop定位优化、Leach协议优化、WSN覆盖优化、组播优化、RSSI定位优化、水声通信、通信上传下载分配
🌈 信号处理方面
信号识别、信号加密、信号去噪、信号增强、雷达信号处理、信号水印嵌入提取、肌电信号、脑电信号、信号配时优化、心电信号、DOA估计、编码译码、变分模态分解、管道泄漏、滤波器、数字信号处理+传输+分析+去噪、数字信号调制、误码率、信号估计、DTMF、信号检测
🌈电力系统方面
微电网优化、无功优化、配电网重构、储能配置、有序充电、MPPT优化、家庭用电
🌈 元胞自动机方面
交通流 人群疏散 病毒扩散 晶体生长 金属腐蚀
🌈 雷达方面
卡尔曼滤波跟踪、航迹关联、航迹融合、SOC估计、阵列优化、NLOS识别
🌈 车间调度
零等待流水车间调度问题NWFSP 、 置换流水车间调度问题PFSP、 混合流水车间调度问题HFSP 、零空闲流水车间调度问题NIFSP、分布式置换流水车间调度问题 DPFSP、阻塞流水车间调度问题BFSP

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐
 21
21 0
0- 0



 已为社区贡献177条内容
已为社区贡献177条内容

所有评论(0)