IMU和GPS ekf融合定位 从matlab到c++代码实现 基于位姿状态方程
IMU和GPS ekf融合定位 从matlab到c++代码实现 基于位姿状态方程,松耦合 文档原创且详细 这段代码是一个数据融合程序,主要用于将GPS和IMU(惯性测量单元)数据进行融合,以估计车辆的位置和姿态。下面我将对代码进行详细的解释和分析。 首先,代码使用了MATLAB的一些函数和工具箱来进行数据处理和仿真。代码中的`clear`函数用于清除MATLAB的工作空间。 接下来,代码定义了一些变量和参数,如`imuFs`和`gpsFs`分别表示IMU和GPS的数据采样频率,`imuSamplesPerGPS`表示每个GPS数据点对应的IMU数据点数量。然后,代码加载了一个名为`trajData0.mat`的数据文件,其中包含了车辆的轨迹数据。 接下来,代码创建了一个名为`gndFusion`的数据融合对象,使用了`insfilterNonholonomic`函数进行初始化。该对象用于融合IMU和GPS数据,并估计车辆的位置和姿态。通过设置不同的参数,可以调整融合算法的性能和精度。 然后,代码初始化了融合对象的状态和噪声参数。状态包括姿态、速度和位置等信息,噪声参数用于模拟传感器的测量误差。此外,代码还定义了一些其他变量,如`Rpos`表示GPS水平位置的精度,`estPositions`用于保存估计的位置数据。 接下来,代码使用一个循环来处理IMU和GPS数据。循环中的每个迭代都包括以下步骤: 1. 预测:根据当前的IMU数据,使用`predict`函数对状态进行预测,得到车辆的姿态和位置估计。 2. 更新:根据当前的GPS数据,使用`fusegps`函数对状态进行更新,修正姿态和位置估计。 3. 保存数据:将预测和更新后的位置数据保存到`estPositions`和`gpsPoss`中。 最后,代码使用`subplot`和`plot`函数将真实位置、估计位置和GPS数据进行可视化展示。 接下来,代码重复了上述的过程,并加载了另一个名为`trajData2.mat`的数据文件,其中包含了另一个车辆的轨迹数据。代码的结构和功能与前面的部分基本相同,只是使用了不同的数据文件和参数。 此外,代码还定义了一些子函数,如`IMUstateTranTcn`函数用于更新状态,`repairQuaternionFcn`函数用于修正四元数的值。这些子函数在主程序中被调用,用于实现状态的更新和修正。 总体而言,这段代码主要是一个数据融合程序,应用在车辆导航和定位领域。它通过融合GPS和IMU数据,估计车辆的位置和姿态。代码的主要思路是使用滤波算法(扩展卡尔曼滤波器)对IMU和GPS数据进行融合,通过预测和更新步骤来估计车辆的状态。代码涉及到了滤波算法、姿态估计、位置估计、传感器模型等知识点。
一、系统概述
IMU(惯性测量单元)与GPS(全球定位系统)数据EKF(扩展卡尔曼滤波)融合定位系统,是一套基于位姿状态方程实现松耦合融合的高精度定位解决方案。该系统通过C++与Matlab双语言开发,能够实时处理IMU的加速度计和陀螺仪数据以及GPS的位置数据,利用EKF算法的预测-更新机制,有效弥补单一传感器的缺陷——IMU在短时间内精度高但存在累积误差,GPS无累积误差但易受遮挡等因素影响导致数据不稳定,最终实现连续、可靠、高精度的定位输出,可广泛应用于自动驾驶、无人机导航、机器人定位等领域。
二、核心功能模块解析
(一)数据预处理模块
- 数据读取与解析
- 在C++实现中,通过ReadDataFromTxt函数从指定的文本文件(如trajData1.txt)中读取系统运行所需的初始化数据与传感器数据。初始化数据包括初始姿态(initialAtt)、初始位置(initialPos)、初始速度(initialVel);传感器数据涵盖IMU的加速度数据(accelDatas)、陀螺仪数据(gyroDatas)、GPS的经纬度高度数据(llas)以及用于结果验证的真实位置数据(truePositions)。读取过程中,通过ReadState枚举类型精准控制数据读取的状态,确保不同类型数据被正确分类存储到对应的数据结构中。
- Matlab版本则通过GenTxtData.m脚本将.mat格式的轨迹数据转换为文本格式,为数据交互与跨语言使用提供支持;同时,通过IMUGPSData_Gen.m生成仿真所需的IMU和GPS数据,其中IMU数据模拟了加速度计和陀螺仪的噪声、分辨率等特性,GPS数据则考虑了水平与垂直位置精度、速度精度等参数,为算法测试与验证提供高质量的仿真数据源。 - 坐标转换
- 系统实现了GPS的LLA(纬度、经度、高度)坐标到ENU(东、北、天)坐标的转换功能。在C++代码的lla2enu函数中,通过特定的数学公式将经纬度数据转换为平面坐标,便于后续与IMU输出的位置数据在同一坐标系下进行融合计算;Matlab代码中则通过gnsstoxy等函数实现类似的坐标转换,确保两种传感器数据的空间一致性,为融合算法的正确运行奠定基础。
(二)EKF滤波核心模块
1. 初始化配置
- C++中通过
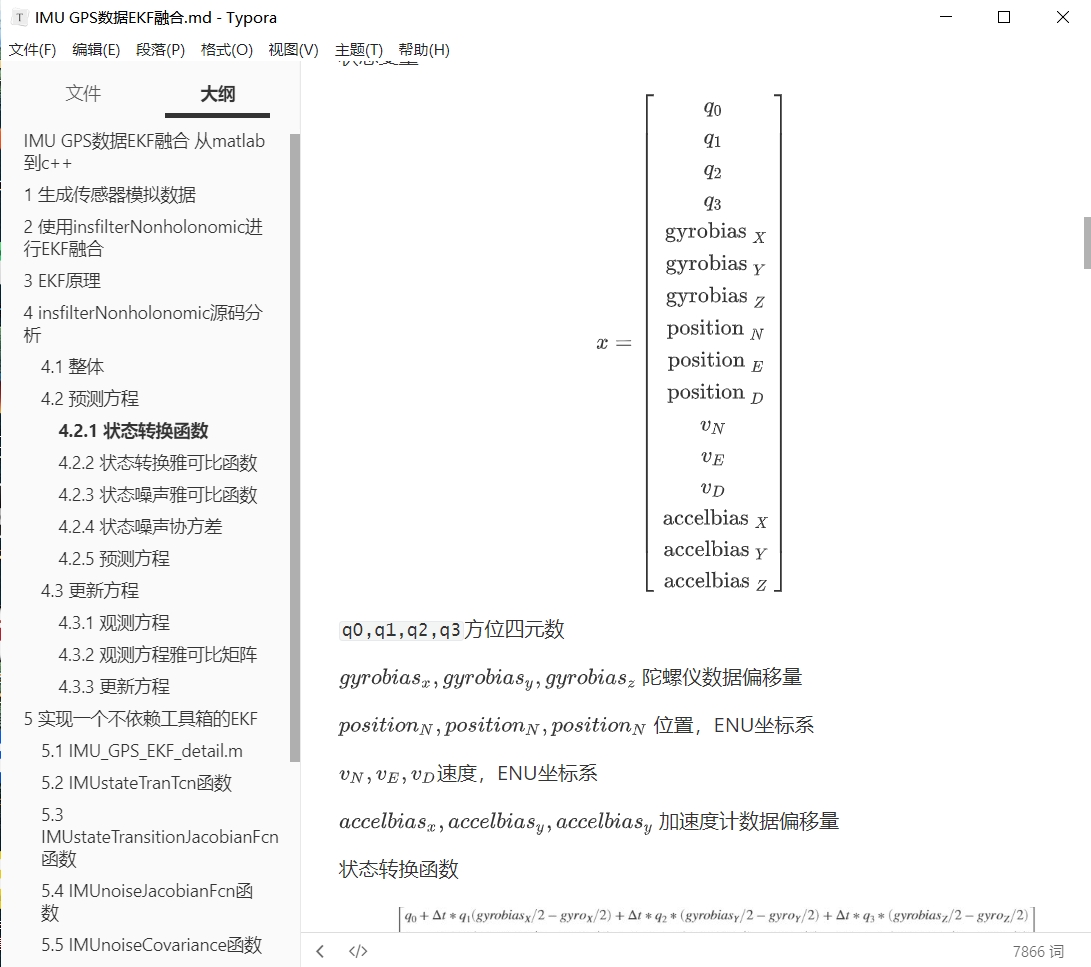
INSEKFfliter类的构造函数完成EKF滤波的初始化工作。初始化参数包括初始姿态(4维四元数)、初始位置(3维向量)、初始速度(3维向量)。在构造函数内部,将初始姿态、位置、速度分别赋值到16维的状态向量(State)对应位置,同时初始化陀螺仪和加速度计的零偏为0,并设置16x16的状态协方差矩阵(StateCovariance)初始值为1e-9 * Ones,表示初始状态下各状态量的不确定性较小。 - Matlab代码在
IMUGPSEKF_detail.m等脚本中,同样对滤波状态向量(16维)、协方差矩阵(16x16)以及各噪声参数(如陀螺仪噪声、加速度计噪声、GPS位置测量噪声等)进行初始化,为滤波过程设置初始条件。
2. 预测阶段(Predict)
- 状态预测:在C++的
IMUstateTranTcn函数中,基于IMU的加速度计和陀螺仪测量数据,结合当前的滤波状态(姿态四元数、位置、速度、传感器零偏),通过位姿状态方程完成状态的预测更新。具体包括:根据陀螺仪数据与陀螺仪零偏计算姿态四元数的更新;基于速度计算位置的更新;通过加速度计数据、加速度计零偏、姿态四元数以及重力加速度(设置为9.81m/s²,Z轴方向)计算速度的更新;同时考虑传感器零偏的衰减特性(通过accelBiasDecayFactor和gyroBiasDecayFactor控制),更新陀螺仪和加速度计的零偏。 - 雅可比矩阵计算:
IMUstateTransitionJacobianFcn函数计算状态转移矩阵(16x16的F矩阵),该矩阵描述了状态向量中各状态量之间的线性化关系,是EKF线性化处理的关键。矩阵元素的计算基于状态预测过程中各状态量的更新公式,通过偏导数推导得到,涵盖了姿态、位置、速度、传感器零偏之间的相互影响。 - 噪声矩阵计算:
IMUnoiseJacobianFcn函数构建噪声传递矩阵(16x12的G矩阵),用于描述过程噪声对状态向量的影响;IMUnoiseCovariance函数定义12x12的过程噪声协方差矩阵(U矩阵),其中包含陀螺仪噪声、陀螺仪零偏噪声、加速度计噪声、加速度计零偏噪声的方差信息。 - 协方差预测:
predictCovEqnFcn函数根据状态转移矩阵F、噪声传递矩阵G和过程噪声协方差矩阵U,通过公式StateCovariance = F StateCovariance F.transpose() + G U G.transpose()完成状态协方差矩阵的预测更新,反映了预测后各状态量不确定性的变化。
3. 更新阶段(Update)
- 测量模型构建:在GPS数据融合时,
GPSPositionmeasurementFcn函数提取状态向量中的位置信息作为滤波的预测测量值(h);GPSPositionmeasurementJacobianFcn函数构建3x16的测量矩阵(H矩阵),该矩阵仅在对应位置状态的列上为1,其余为0,表示GPS测量仅对位置状态进行观测。 - 卡尔曼增益计算:在
correctEqnFcn函数中,首先计算innovation协方差矩阵(innovCov = H StateCovariance H.transpose() + R,其中R为GPS位置测量噪声协方差矩阵),然后基于状态协方差矩阵、测量矩阵和innovation协方差矩阵计算卡尔曼增益(W = StateCovariance H.transpose() innovCov.inverse()),卡尔曼增益决定了测量值与预测值在状态更新中的权重。 - 状态与协方差更新:利用GPS的测量位置(经坐标转换后)与预测测量值的差值(innovation),结合卡尔曼增益对状态向量进行更新(
State = State + W (pos - h));同时更新状态协方差矩阵(StateCovariance = StateCovariance - WH * StateCovariance),降低状态量的不确定性,完成一次EKF的更新过程。
(三)数据融合与结果输出模块
- 多传感器数据时序同步
- 由于IMU与GPS的采样频率不同(通常IMU采样频率远高于GPS,如C++代码中IMU每0.01s采样一次,GPS每处理10次IMU数据后采样一次),系统通过嵌套循环实现数据的时序同步。在C++的
main函数中,内层循环处理IMU数据,执行EKF的预测阶段;外层循环处理GPS数据,执行EKF的更新阶段,确保两种传感器数据在时间上匹配,满足融合算法的时序要求。 - Matlab代码在
GroundIMUandGPSFusionExample.m等脚本中,同样通过控制IMU和GPS的采样次数(imuSamplesPerGPS = imuFs / gpsFs)实现数据同步,保证滤波过程按正确的时序进行。
- 结果输出与可视化
- C++代码在融合过程中,通过
getpos函数获取当前滤波估计的位置,并将真实位置与估计位置输出到控制台,便于实时观察定位误差。 - Matlab代码提供了丰富的结果可视化功能,如在
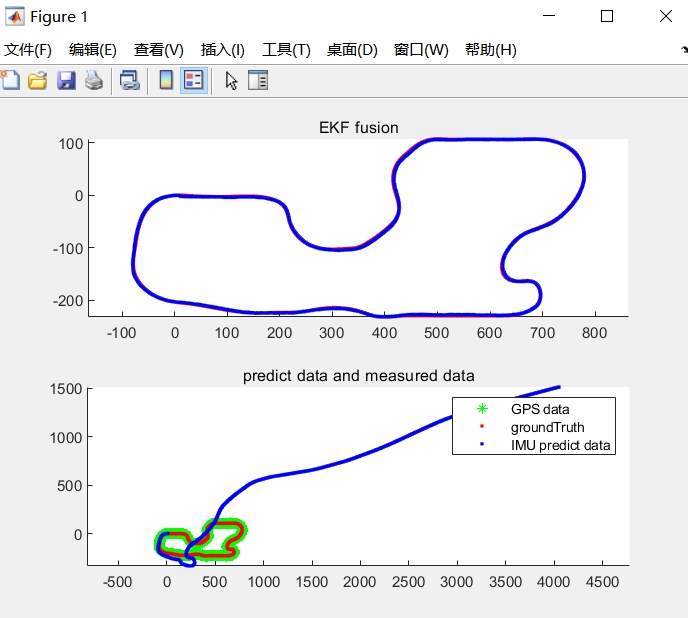
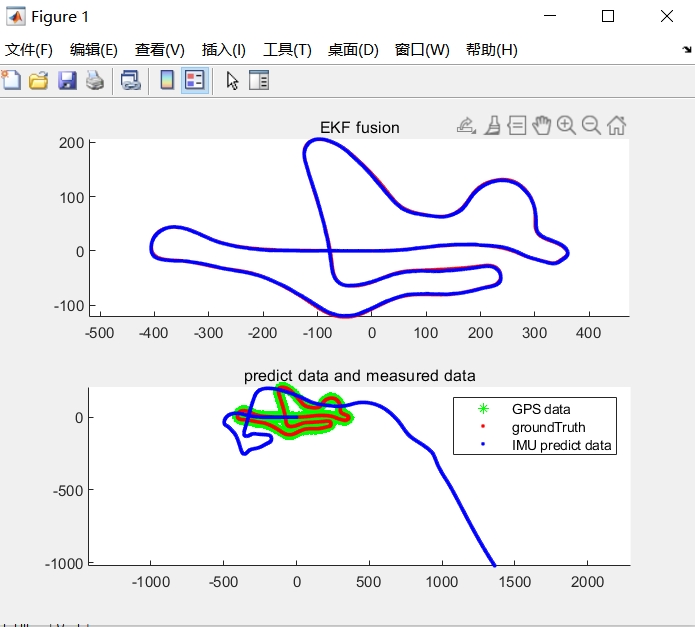
IMUGPSEKF.m和IMUGPSEKF_detail.m中,通过subplot函数绘制真实位置、EKF融合位置、仅IMU预测位置、GPS测量位置的对比曲线,直观展示融合算法的效果;同时,利用HelperScrollingPlotter、HelperPoseViewer等辅助类,实现位置误差、姿态误差的实时滚动显示以及3D姿态与位置的可视化,便于算法性能分析与调试。
三、关键参数配置
(一)传感器噪声参数
| 参数名称 | C++中定义值 | Matlab中定义值 | 说明 |
|---|---|---|---|
| 陀螺仪噪声(GyroscopeNoise) | 4e-6 | 4e-6 | 描述陀螺仪测量噪声的方差,影响姿态预测的不确定性 |
| 陀螺仪零偏噪声(GyroscopeBiasNoise) | 4e-14 | 4e-14 | 描述陀螺仪零偏随机游走噪声的方差,影响零偏估计的稳定性 |
| 加速度计噪声(AccelerometerNoise) | 4.8e-2 | 4.8e-2 | 描述加速度计测量噪声的方差,影响速度与位置预测的精度 |
| 加速度计零偏噪声(AccelerometerBiasNoise) | 4e-14 | 4e-14 | 描述加速度计零偏随机游走噪声的方差,影响零偏估计的准确性 |
| GPS位置测量噪声(Rpos) | 1 | 1 | 描述GPS位置测量噪声的方差,影响GPS测量在更新阶段的权重 |
(二)滤波控制参数
| 参数名称 | C++中定义值 | Matlab中定义值 | 说明 |
|---|---|---|---|
| 加速度计零偏衰减因子(accelBiasDecayFactor) | 0.9999 | 0.9999 | 控制加速度计零偏的衰减速度,接近1表示零偏变化缓慢 |
| 陀螺仪零偏衰减因子(gyroBiasDecayFactor) | 0.999 | 0.999 | 控制陀螺仪零偏的衰减速度,影响零偏估计的动态响应 |
| IMU采样时间(dt) | 0.01s | 根据imuFs计算(1/imuFs) |
IMU数据的采样间隔,决定预测阶段的时间步长 |
四、系统工作流程
- 数据准备:通过数据预处理模块读取或生成IMU、GPS的传感器数据以及初始化参数,完成坐标转换与数据格式统一。
- 滤波初始化:创建EKF滤波实例,初始化状态向量、状态协方差矩阵以及各噪声参数,为滤波过程设置初始条件。
- 时序同步与滤波循环
- IMU预测:按IMU采样频率,读取IMU加速度计和陀螺仪数据,执行EKF预测阶段,更新状态向量与状态协方差矩阵。
- GPS更新:当累积到指定次数的IMU数据后,读取GPS的LLA数据并转换为ENU坐标,执行EKF更新阶段,利用GPS测量值修正滤波状态,降低状态不确定性。 - 结果输出与分析:实时输出或记录真实位置与滤波估计位置,通过可视化工具展示定位误差与融合效果,评估系统性能。
五、系统特点与优势
- 高精度定位:采用EKF算法实现IMU与GPS的松耦合融合,充分发挥两种传感器的优势,有效抑制IMU的累积误差和GPS的随机噪声,提升定位精度与稳定性。
- 鲁棒性强:引入传感器零偏估计与衰减机制,能够适应传感器零偏随时间变化的特性;合理设置噪声参数与协方差矩阵,增强系统对噪声的抑制能力。
- 跨语言支持:提供C++与Matlab双语言实现,C++版本可用于实时嵌入式系统,Matlab版本便于算法仿真、调试与性能分析,满足不同开发与应用场景的需求。
- 易用性与可扩展性:代码模块划分清晰,核心功能封装在类或函数中,接口简洁,便于后续集成新的传感器(如激光雷达、视觉传感器)或改进滤波算法(如无迹卡尔曼滤波、粒子滤波)。
六、应用场景与展望
(一)应用场景
- 自动驾驶:为自动驾驶车辆提供连续、高精度的定位信息,辅助车辆路径规划、车道保持、障碍物避让等功能的实现。
- 无人机导航:在无人机飞行过程中,融合IMU与GPS数据,确保无人机在复杂环境(如城市峡谷、室内外过渡区域)下的稳定导航与定位。
- 机器人定位:为移动机器人(如AGV、服务机器人)提供室内外一体化的定位解决方案,满足机器人自主移动、任务执行的定位需求。
(二)未来展望
- 多传感器融合扩展:进一步集成激光雷达、视觉相机等传感器数据,构建多传感器融合定位系统,提升系统在极端环境(如GPS拒止区域)下的定位性能。
- 算法优化:研究基于深度学习的噪声参数自适应调整方法,替代当前的固定噪声参数配置,使系统能够根据环境变化动态优化滤波性能;探索更先进的滤波算法,如联邦卡尔曼滤波、分布式卡尔曼滤波,适应多传感器分布式布局的需求。
- 实时性提升:对C++代码进行进一步优化(如采用GPU加速、指令集优化),降低算法计算复杂度,满足高动态场景下(如高速行驶的车辆、快速飞行的无人机)对实时定位的需求。
IMU和GPS ekf融合定位 从matlab到c++代码实现 基于位姿状态方程,松耦合 文档原创且详细 这段代码是一个数据融合程序,主要用于将GPS和IMU(惯性测量单元)数据进行融合,以估计车辆的位置和姿态。下面我将对代码进行详细的解释和分析。 首先,代码使用了MATLAB的一些函数和工具箱来进行数据处理和仿真。代码中的`clear`函数用于清除MATLAB的工作空间。 接下来,代码定义了一些变量和参数,如`imuFs`和`gpsFs`分别表示IMU和GPS的数据采样频率,`imuSamplesPerGPS`表示每个GPS数据点对应的IMU数据点数量。然后,代码加载了一个名为`trajData0.mat`的数据文件,其中包含了车辆的轨迹数据。 接下来,代码创建了一个名为`gndFusion`的数据融合对象,使用了`insfilterNonholonomic`函数进行初始化。该对象用于融合IMU和GPS数据,并估计车辆的位置和姿态。通过设置不同的参数,可以调整融合算法的性能和精度。 然后,代码初始化了融合对象的状态和噪声参数。状态包括姿态、速度和位置等信息,噪声参数用于模拟传感器的测量误差。此外,代码还定义了一些其他变量,如`Rpos`表示GPS水平位置的精度,`estPositions`用于保存估计的位置数据。 接下来,代码使用一个循环来处理IMU和GPS数据。循环中的每个迭代都包括以下步骤: 1. 预测:根据当前的IMU数据,使用`predict`函数对状态进行预测,得到车辆的姿态和位置估计。 2. 更新:根据当前的GPS数据,使用`fusegps`函数对状态进行更新,修正姿态和位置估计。 3. 保存数据:将预测和更新后的位置数据保存到`estPositions`和`gpsPoss`中。 最后,代码使用`subplot`和`plot`函数将真实位置、估计位置和GPS数据进行可视化展示。 接下来,代码重复了上述的过程,并加载了另一个名为`trajData2.mat`的数据文件,其中包含了另一个车辆的轨迹数据。代码的结构和功能与前面的部分基本相同,只是使用了不同的数据文件和参数。 此外,代码还定义了一些子函数,如`IMUstateTranTcn`函数用于更新状态,`repairQuaternionFcn`函数用于修正四元数的值。这些子函数在主程序中被调用,用于实现状态的更新和修正。 总体而言,这段代码主要是一个数据融合程序,应用在车辆导航和定位领域。它通过融合GPS和IMU数据,估计车辆的位置和姿态。代码的主要思路是使用滤波算法(扩展卡尔曼滤波器)对IMU和GPS数据进行融合,通过预测和更新步骤来估计车辆的状态。代码涉及到了滤波算法、姿态估计、位置估计、传感器模型等知识点。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐

 13
13 0
0- 0



 已为社区贡献5条内容
已为社区贡献5条内容

所有评论(0)