蚁群DWA单机器人多动态障碍物路径规划系统代码功能说明
蚁群算法融合动态窗口法路径规划算法 多动态障碍物
一、系统概述
蚁群DWA单机器人多动态障碍物路径规划系统,是一套基于MATLAB开发的集成化路径规划解决方案。该系统创新性地融合蚁群算法(Ant Colony Optimization, ACO)的全局路径规划能力与动态窗口法(Dynamic Window Approach, DWA)的局部实时避障优势,针对单机器人在包含多动态障碍物的复杂环境中,实现从起点到目标点的高效、安全、平滑路径规划。
系统核心价值在于解决传统路径规划算法在动态环境下适应性差、路径平滑度不足等问题。蚁群算法负责在已知静态障碍物地图中生成全局最优路径,为机器人提供宏观行驶方向;DWA算法则实时感知动态障碍物运动状态,在全局路径基础上动态调整机器人速度与角速度,确保机器人在行驶过程中能够灵活避障,同时兼顾路径的平滑性与行驶效率。
蚁群算法融合动态窗口法路径规划算法 多动态障碍物
系统支持自定义地图尺寸、静态障碍物分布、动态障碍物数量及运动轨迹,提供可视化交互界面供用户选择机器人起点、目标点及障碍物参数,输出路径规划结果、路径长度、算法运行时间等关键指标,并通过动态仿真演示机器人行驶过程,适用于机器人导航、自动驾驶、仓储物流等领域的路径规划算法验证与应用开发。
二、核心功能模块
(一)地图与环境构建模块
该模块是系统运行的基础,负责创建机器人行驶的二维网格地图,并定义静态障碍物、动态障碍物的初始状态与运动参数,为后续路径规划算法提供环境模型支持。
- 地图初始化
- 支持正方形网格地图创建,通过MAX0矩阵定义地图尺寸与静态障碍物分布,矩阵中“0”表示无障碍物区域,“1”表示静态障碍物区域。
- 提供地图旋转功能,通过rot90函数将MAX0矩阵逆时针旋转270度,确保用户定义的障碍物分布与最终可视化地图一致,解决矩阵存储与图形显示方向差异问题。
- 自动计算地图边界参数,通过size函数获取地图的X轴长度(MAXX)与Y轴长度(MAXY),确定机器人行驶的空间范围。
- 障碍物管理
- 静态障碍物处理:遍历MAX矩阵,将静态障碍物坐标存储到CLOSED列表中,同时在可视化界面中以黑色方块形式绘制静态障碍物,直观展示障碍物分布。
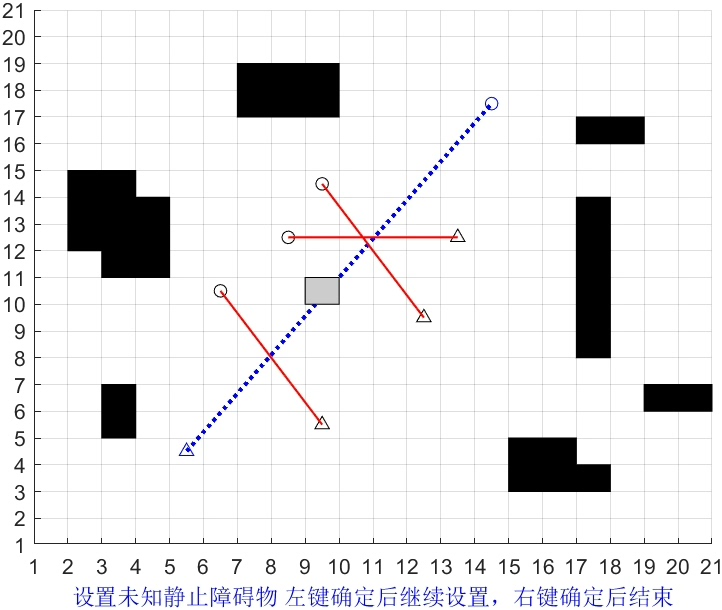
- 动态障碍物设置:支持用户通过鼠标交互设置多个动态障碍物的起点与终点,系统自动调用A*算法(AstarG函数)为每个动态障碍物规划运动路径,并根据设定的速度参数(Lobst)生成动态障碍物的实时位置序列,在可视化界面中以黄色方块及运动轨迹线(红色虚线)展示动态障碍物运动状态。
- 未知静态障碍物添加:允许用户在地图初始化后,通过鼠标左键添加未知静态障碍物,系统实时更新障碍物列表(Obsdj),并在可视化界面中以灰色方块标记,增强系统对动态变化环境的适应性。
- 起点与目标点设置
- 提供交互式起点、目标点选择功能,通过msgbox函数弹出提示信息,引导用户使用鼠标左键在地图中选择机器人起点(蓝色三角形标记)与目标点(蓝色圆形标记)。
- 对用户选择的坐标进行预处理,通过floor函数将鼠标获取的浮点数坐标转换为整数网格坐标,确保起点与目标点位于合法的地图网格内,避免坐标超出地图边界或落在障碍物区域。
(二)全局路径规划模块(蚁群算法)
全局路径规划模块基于蚁群算法实现,在已知静态障碍物的地图环境中,为机器人计算从起点到目标点的全局最优路径,为后续局部避障提供基础路径参考。
- 蚁群算法参数初始化
- 信息素矩阵(Tau):初始化一个MM×MM(MM为地图边长)的信息素矩阵,初始值设为8,确保算法初始阶段各路径具有相同的信息素浓度,保证搜索的公平性。
- 算法控制参数:设置迭代次数(K=100)、蚂蚁数量(M=50)、信息素重要程度参数(Alpha=1)、启发式因子重要程度参数(Beta=7)、信息素蒸发系数(Rho=0.1)、信息素增加强度系数(Q=1)等关键参数,平衡算法的探索能力与收敛速度。
- 启发式信息矩阵(Eta):基于节点到目标点的直线距离倒数的平方计算启发式信息,距离目标点越近的节点,启发式信息值越大,引导蚂蚁优先向目标点方向搜索。
- 蚂蚁路径搜索
- 每轮迭代中,为每只蚂蚁初始化禁忌表(TABUkm),记录蚂蚁已访问的节点,避免重复访问。
- 蚂蚁根据信息素浓度与启发式信息,通过转轮赌法选择下一个待访问节点。对于当前节点的每个相邻节点,计算其被选择的概率,概率与该节点的信息素浓度的Alpha次方、启发式信息的Beta次方成正比。
- 蚂蚁从起点出发,按照节点选择概率依次移动,直到到达目标点或陷入死胡同(无未访问的相邻节点),记录每只蚂蚁的行驶路径(ROUTES)与路径长度(PL)。
- 信息素更新
- 局部信息素更新:每轮迭代结束后,根据信息素蒸发系数Rho,对所有路径的信息素进行蒸发,减少过时信息素对后续搜索的影响,公式为Tau=(1-Rho).*Tau。
- 全局信息素增强:对成功到达目标点的蚂蚁路径,根据路径长度增加信息素浓度,路径越短的蚂蚁,其路径上的信息素增加量越多,公式为DeltaTau(x,y)=DeltaTau(x,y)+Q/PLkm(PLkm为蚂蚁路径长度),引导后续蚂蚁优先选择优质路径。
- 信息素边界限制:设置信息素最大阈值(Taumax)与最小阈值(Taumin),避免信息素浓度过高导致算法过早收敛(局部最优)或过低导致算法搜索效率下降,确保算法在探索与收敛之间保持平衡。
- 全局最优路径提取与优化
- 在所有迭代轮次中,跟踪记录最短路径(RouteShortest),即路径长度最小的蚂蚁路径。
- 对最短路径进行坐标转换,将蚂蚁搜索的节点索引转换为地图网格坐标,生成初始全局路径(Planpath)。
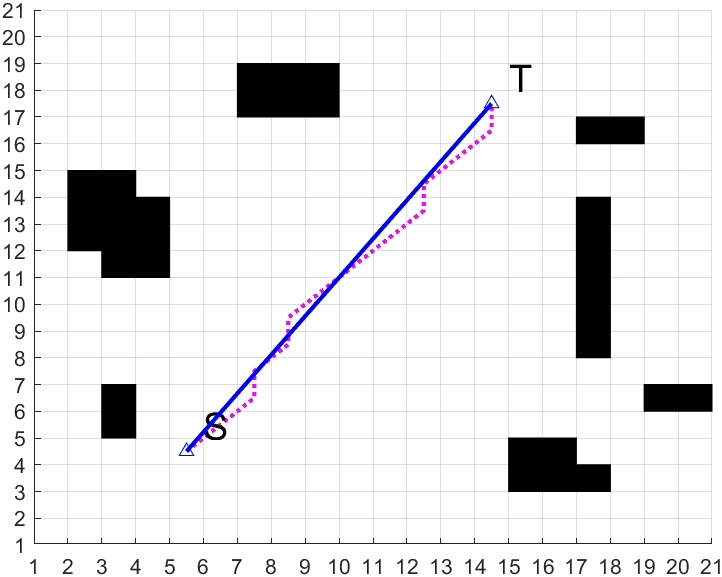
- 调用路径平滑优化函数(LineOPENST、LineOPENSTtwo),通过删除路径中的冗余节点、调整折线角度等方式,减少路径转折次数,提升路径平滑度,最终生成优化后的全局路径(Plan_path2),为机器人提供更易于行驶的宏观路径。
(三)局部避障与运动控制模块(DWA算法)
局部避障与运动控制模块是系统应对动态环境的核心,基于DWA算法实时处理动态障碍物信息,在全局路径基础上调整机器人运动状态,确保机器人安全、高效行驶。
- 动态窗口计算
- 速度约束分析:根据机器人运动学模型参数(最高速度、最高旋转速度、加速度、旋转加速度等),确定机器人在当前时刻的速度(v)与角速度(w)的可行范围,即静态窗口(Vs)。
- 动态窗口生成:结合机器人当前运动状态(x,包含位置、航向角、速度、角速度)与加速度约束,计算未来0.1秒内机器人速度与角速度的可达范围,即动态窗口(Vd)。
- 最终窗口确定:取静态窗口与动态窗口的交集,得到机器人当前时刻的可行速度与角速度范围(Vr),确保机器人运动状态符合物理性能限制,避免超速、急加速等超出机器人能力的运动。
- 轨迹预测与评价
- 轨迹生成:在可行速度与角速度范围内,按照速度分辨率与转速分辨率,生成多组候选速度(vt)与角速度(ot)组合。对每组组合,基于机器人运动学模型(f函数),预测未来3秒内机器人的行驶轨迹(traj)与最终位置(xt)。
- 多维度评价函数:从三个关键维度对候选轨迹进行评价,计算轨迹的综合得分,选择最优轨迹。
- 方位角评价(heading):计算预测轨迹终点与目标点的方位角偏差,偏差越小,得分越高,确保机器人向目标点方向行驶。
- 障碍物距离评价(dist):计算预测轨迹上机器人与静态障碍物、动态障碍物的最小距离,距离越大,得分越高,保证机器人行驶安全。
- 速度评价(velocity):以候选速度的绝对值作为评价指标,速度越大,得分越高,提升机器人行驶效率。
- 评价函数正则化:对三个维度的评价得分进行归一化处理,消除不同维度得分的量纲差异,根据预设权重(evalParam)计算候选轨迹的综合得分,权重可根据实际需求调整,平衡安全性与效率。
- 机器人运动控制
- 最优速度选择:根据候选轨迹的综合得分,选择得分最高的轨迹对应的速度(v)与角速度(w),作为机器人当前时刻的控制指令(u)。
- 运动状态更新:基于机器人运动学模型(f函数),根据控制指令更新机器人的位置、航向角、速度、角速度等状态信息(x),实现机器人的实时运动控制。
- 动态障碍物实时更新:在每轮运动控制周期内,更新动态障碍物的当前位置(根据动态障碍物的运动路径与速度),重新计算机器人与动态障碍物的距离,确保避障决策的实时性与准确性。
- 目标点动态调整
- 全局路径跟踪:根据机器人当前位置(dangnode)与全局路径节点(pathnode)的距离,动态选择机器人的局部目标点(Tg)。当机器人接近当前局部目标点时,自动切换到下一个全局路径节点,确保机器人沿全局路径行驶。
- 避障优先级判断:若局部目标点附近存在动态障碍物(距离小于安全阈值),则临时调整局部目标点,引导机器人绕开障碍物区域,待障碍物远离后,重新回到全局路径,平衡全局路径跟踪与局部避障需求。
(四)可视化与结果输出模块
可视化与结果输出模块是系统与用户交互的关键,负责将路径规划过程、机器人运动状态以图形化方式展示,并输出算法运行关键指标,帮助用户直观理解算法效果。
- 实时可视化仿真
- 静态环境展示:在MATLAB图形窗口中,以黑色方块绘制静态障碍物,灰色方块绘制未知静态障碍物,蓝色三角形标记机器人起点,蓝色圆形标记目标点,清晰呈现机器人行驶环境。
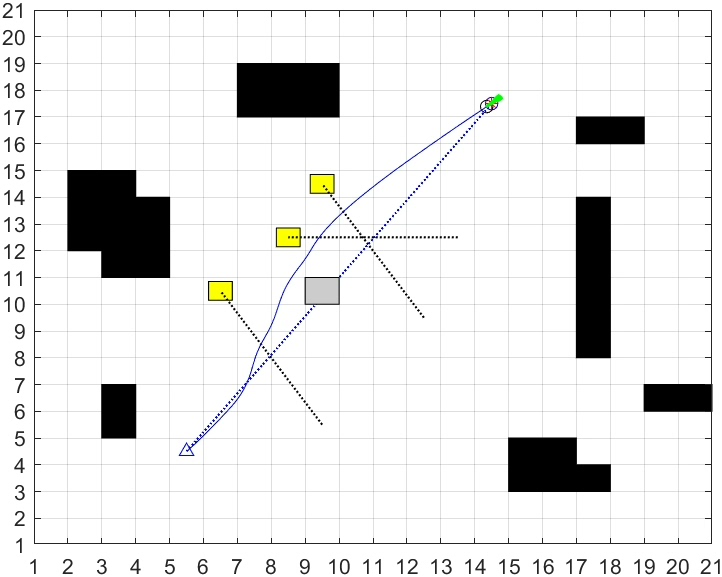
- 动态过程演示:实时绘制机器人当前位置(蓝色箭头,箭头方向表示机器人航向角)、已行驶路径(蓝色实线)、全局路径(蓝色虚线)、动态障碍物位置(黄色方块)及运动轨迹(黑色虚线),直观展示机器人与障碍物的运动状态。
- 候选轨迹展示:在DWA算法计算过程中,以绿色虚线绘制所有候选轨迹,帮助用户理解算法的轨迹搜索过程与最优轨迹选择依据。
- 关键指标输出
- 算法运行时间:通过tic与toc函数记录蚁群算法的全局路径规划时间、DWA算法的局部避障控制时间,为算法性能优化提供数据支持。
- 路径长度计算:通过Distance_path函数计算全局路径长度,通过遍历机器人运动状态序列计算实际行驶路径长度,对比分析路径规划的最优性。
- 运动参数曲线:输出机器人行驶过程中的姿态角度(yaw)、线速度(v)、角速度(w)随时间的变化曲线,帮助用户分析机器人运动的平稳性与控制精度。
- 交互与提示功能
- 操作提示:通过msgbox函数弹出操作提示窗口,引导用户完成起点选择、目标点选择、动态障碍物参数设置等操作,降低用户使用门槛。
- 异常提示:当蚁群算法无法找到从起点到目标点的路径(如起点或目标点被障碍物包围)时,弹出警告窗口提示“无可行路径”,并自动暂停程序,避免系统异常运行。
- 结果保存:支持将路径规划结果(机器人运动状态序列、路径坐标)存储到变量中,供用户后续分析或导出到文件,方便算法结果的二次利用。
三、系统工作流程
- 初始化阶段
- 调用地图与环境构建模块,加载或创建地图矩阵(MAX0),旋转地图矩阵并计算地图边界参数(MAXX、MAXY)。
- 遍历地图矩阵,提取静态障碍物坐标并存储到CLOSED列表,在可视化界面中绘制静态障碍物。
- 弹出交互提示窗口,引导用户通过鼠标选择机器人起点(Start)与目标点(Goal),记录起点与目标点坐标。
- 全局路径规划阶段
- 初始化蚁群算法参数(信息素矩阵、启发式信息矩阵、控制参数等),设置迭代次数与蚂蚁数量。
- 启动蚁群算法迭代:每轮迭代中,蚂蚁从起点出发,根据信息素与启发式信息搜索路径,记录路径与长度;迭代结束后,更新信息素矩阵,跟踪最短路径。
- 迭代完成后,提取全局最短路径,调用路径平滑优化函数,生成优化后的全局路径(Plan_path2),在可视化界面中绘制全局路径(蓝色虚线),输出全局路径长度与算法运行时间。
- 动态障碍物设置阶段
- 弹出交互提示窗口,引导用户通过鼠标选择多个动态障碍物的起点与终点,为每个动态障碍物调用AstarG函数规划运动路径,生成动态障碍物的位置序列(Obstddline、Obstddline1等)。
- 允许用户添加未知静态障碍物,更新障碍物列表(Obsd_j),在可视化界面中绘制未知静态障碍物(灰色方块)与动态障碍物起点(黑色三角形)、终点(黑色圆形)及运动轨迹(红色虚线)。
- 局部避障与运动控制阶段
- 初始化机器人运动状态(x),包括初始位置(起点坐标)、初始航向角(angle_node)、初始速度(0)、初始角速度(0),设置机器人运动学模型参数(Kinematic)与DWA评价函数权重(evalParam)。
- 启动DWA算法循环:
- 计算机器人当前可行速度与角速度窗口(Vr),生成候选速度与角速度组合。
- 对每组候选组合,预测未来3秒轨迹,计算轨迹的方位角、障碍物距离、速度评价得分,归一化后得到综合得分,选择最优控制指令(u)。
- 根据最优控制指令更新机器人运动状态,在可视化界面中更新机器人位置、已行驶路径、动态障碍物位置。
- 判断机器人是否到达目标点(距离目标点小于0.2个网格单位),若到达则结束循环;否则重复上述步骤,实现实时避障与运动控制。
- 结果输出阶段
- 循环结束后,输出机器人实际行驶路径长度、DWA算法运行时间。
- 绘制机器人姿态角度、线速度、角速度随时间的变化曲线,展示机器人运动性能。
- 保持可视化界面,供用户观察机器人行驶全过程与路径规划结果,支持用户手动关闭界面或重新运行程序。
四、关键技术特点
- 算法融合创新
- 突破传统单一算法的局限性,将蚁群算法的全局最优搜索能力与DWA算法的局部实时避障能力深度融合,全局路径为局部避障提供方向指导,局部避障确保全局路径在动态环境中的可行性,实现“全局规划-局部调整”的协同工作模式,提升系统在复杂动态环境中的适应性。
- 路径平滑优化
- 针对蚁群算法生成的路径存在较多转折的问题,设计多轮路径平滑优化流程。通过LineOPENST函数删除路径中的冗余节点,合并共线线段;通过LineOPENSTtwo函数进一步调整折线角度,减少路径转折次数,生成平滑的全局路径,降低机器人行驶过程中的转向频率,提升行驶平稳性与效率。
- 动态障碍物实时处理
- 支持多动态障碍物同时存在的场景,为每个动态障碍物规划独立运动路径,实时更新障碍物位置信息。在DWA算法的轨迹评价环节,将动态障碍物距离作为关键评价指标,确保机器人能够提前感知动态障碍物运动趋势,及时调整行驶方向与速度,避免碰撞风险。
- 交互式可视化体验
- 提供友好的交互式操作界面,用户无需修改代码,通过鼠标即可完成地图参数设置、起点与目标点选择、动态障碍物添加等操作,降低系统使用门槛。
- 实时动态仿真功能直观展示算法运行过程与机器人运动状态,包括全局路径生成、候选轨迹搜索、动态障碍物运动、机器人避障行驶等,帮助用户快速理解算法原理与系统功能。
- 参数可配置性
- 系统核心参数(如蚁群算法的迭代次数、蚂蚁数量、信息素参数,DWA算法的速度约束、评价函数权重,机器人运动学模型参数等)均支持用户根据实际需求调整,用户可通过修改参数文件或交互界面输入,优化算法性能以适应不同的应用场景(如高速行驶场景、高精度避障场景等)。
五、应用场景与扩展方向
(一)典型应用场景
- 室内移动机器人导航:在仓储、办公楼等室内环境中,机器人需要在货架、行人(动态障碍物)等环境中自主导航,系统可生成全局最优路径,并实时避障,确保机器人高效完成货物搬运、巡检等任务。
- 自动驾驶低速场景:在停车场、园区等低速自动驾驶场景中,系统可处理其他车辆、行人等动态障碍物,为自动驾驶车辆提供安全行驶路径,避免碰撞事故。
- 机器人路径规划算法验证:作为算法验证平台,可用于对比不同路径规划算法(如蚁群算法、A*算法、DWA算法)的性能,或优化同一算法的参数,为算法研究与改进提供实验支撑。
(二)系统扩展方向
- 多机器人协同规划:当前系统针对单机器人场景,未来可扩展为多机器人路径规划系统,通过引入分布式蚁群算法或冲突检测机制,解决多机器人在同一环境中的路径协调问题,避免机器人之间的碰撞与路径冲突。
- 三维环境路径规划:现有系统基于二维网格地图,可扩展为三维空间路径规划,将地图模型从二维网格升级为三维点云或体素模型,适应无人机、水下机器人等在三维环境中的导航需求。
- 传感器数据融合:目前系统依赖预设的障碍物信息,未来可集成激光雷达、视觉摄像头等传感器数据处理模块,实时感知环境中的障碍物信息,减少对预设环境模型的依赖,提升系统在未知环境中的适应性。
- 嵌入式平台移植:当前系统基于MATLAB开发,主要用于算法验证,可将核心算法(如DWA局部避障算法)移植到嵌入式平台(如STM32、ROS系统),实现算法的实时运行,为实际机器人硬件提供路径规划与运动控制功能。
六、总结
蚁群DWA单机器人多动态障碍物路径规划系统,通过融合蚁群算法与DWA算法,实现了动态环境下机器人路径规划的全局最优性与局部实时性的平衡。系统具备完整的地图构建、路径规划、避障控制、可视化输出功能,支持用户交互操作与参数配置,可广泛应用于机器人导航、自动驾驶等领域。
系统的核心优势在于算法融合创新与动态环境适应性,通过多轮路径平滑优化提升路径质量,通过实时动态障碍物处理确保行驶安全。未来可通过扩展多机器人协同、三维环境适配、传感器数据融合等功能,进一步提升系统的应用范围与实用价值,为机器人自主导航技术的发展提供有力支撑。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐

 8
8 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)