TEB算法原理与代码分析 详细文档+代码分析+matlab程序包 这段代码看起来是一个路径规划...
MATLAB 中的 TEB 实现是一个工程化程度高、配置灵活的轨迹优化模块。它通过图优化框架统一处理多源约束,结合自适应节点调整与高效数值求解器,在保证实时性的同时生成动力学可行、安全平滑的轨迹。其设计充分体现了软约束优化在机器人运动规划中的强大能力,为自动驾驶、移动机器人等领域提供了可靠的底层支持。TEB算法原理与代码分析详细文档+代码分析+matlab程序包这段代码看起来是一个路径规划算法的实
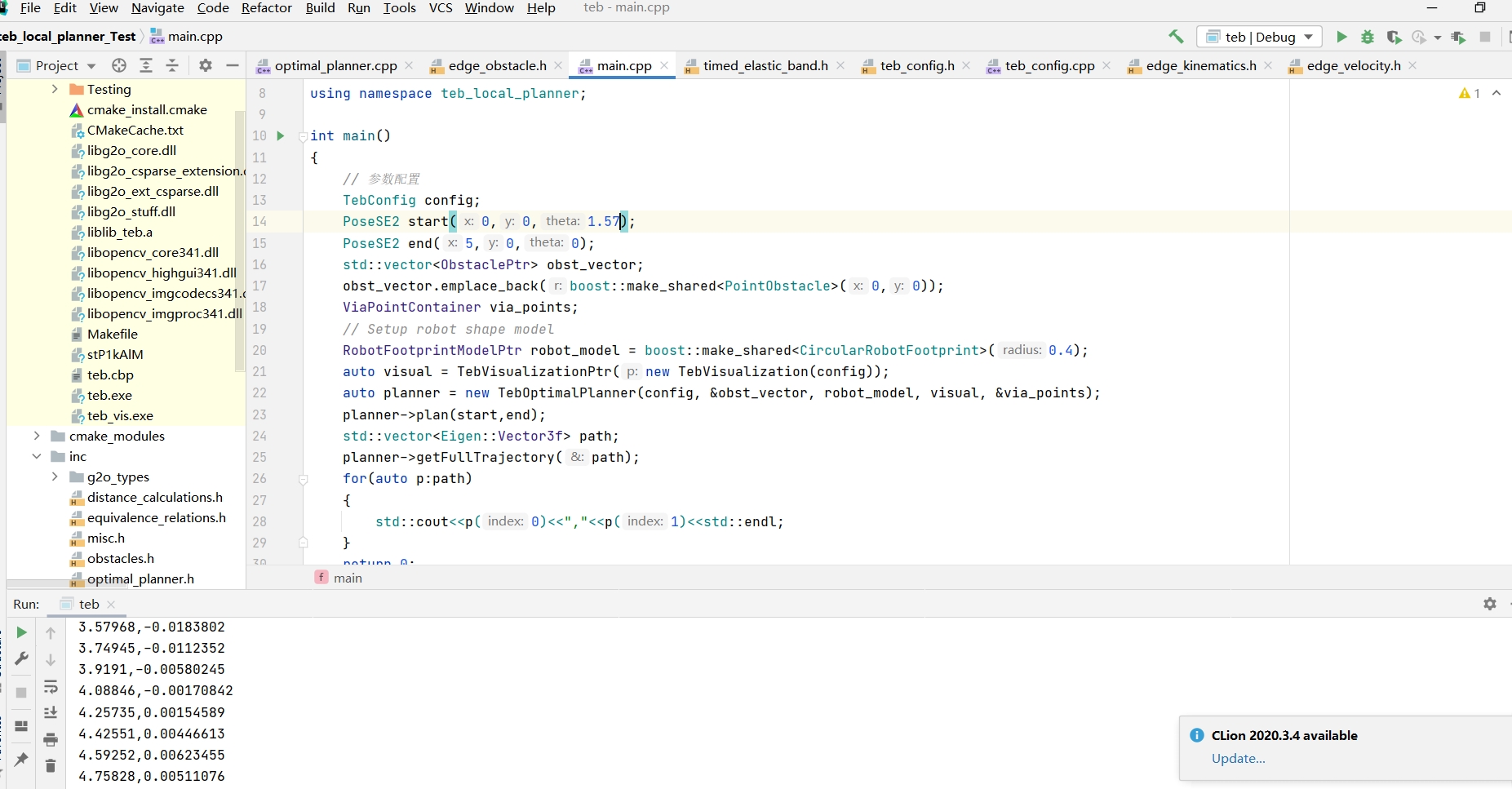
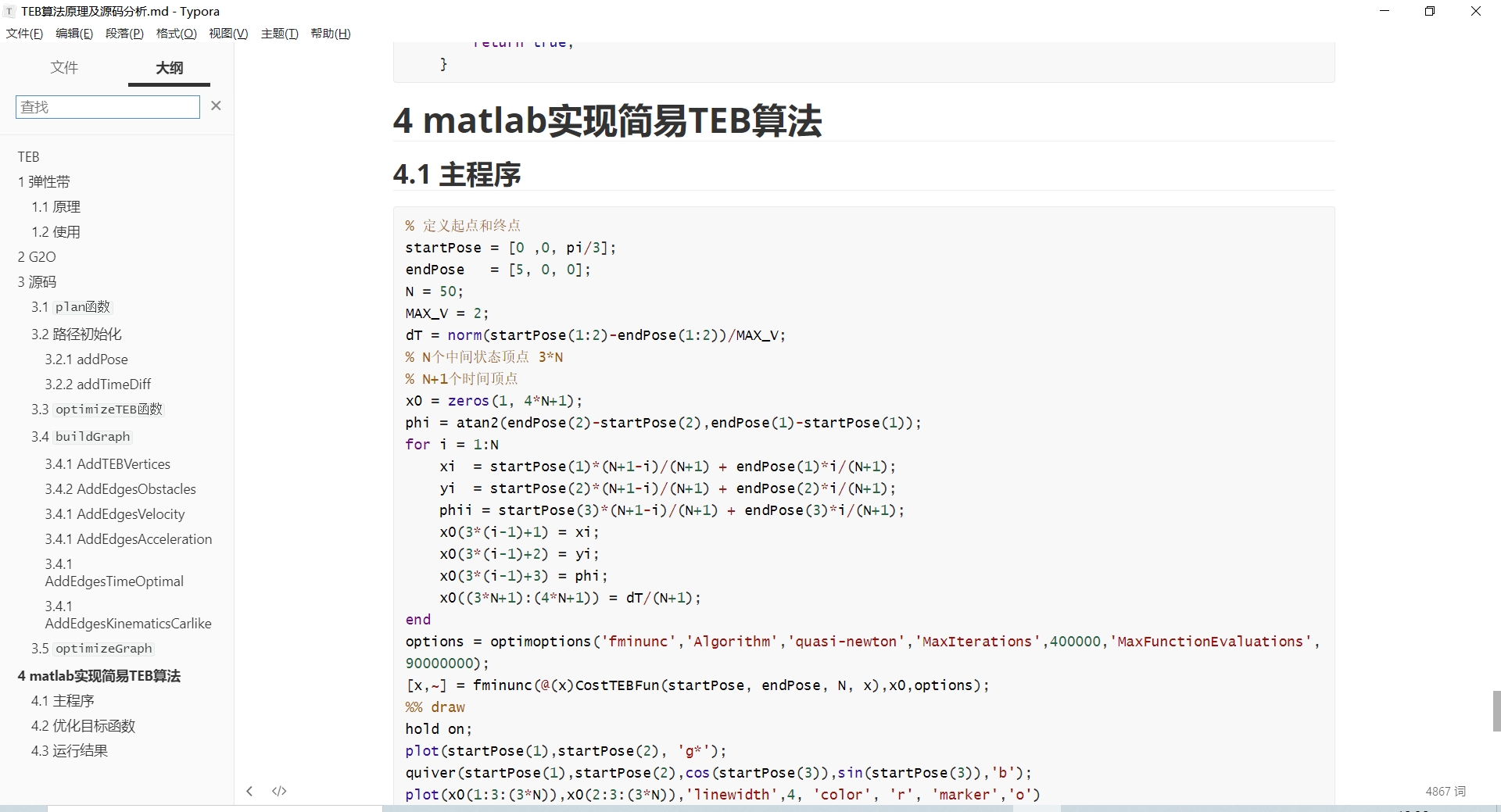
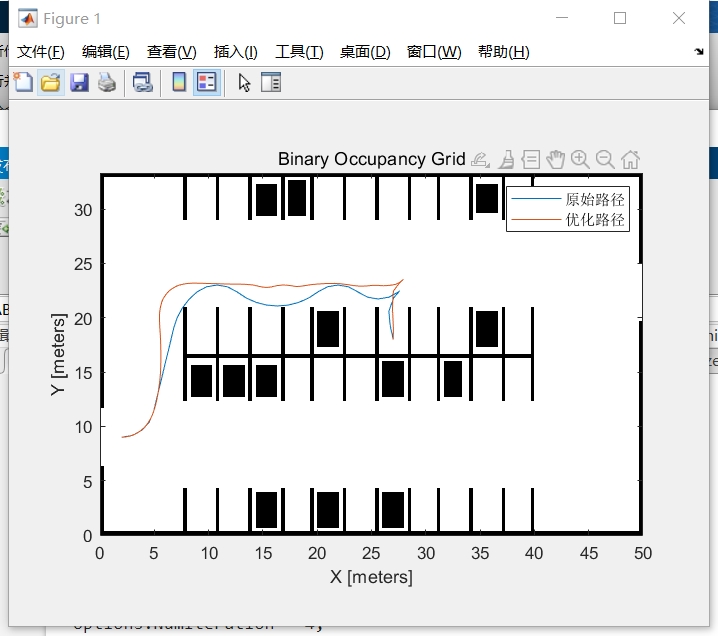
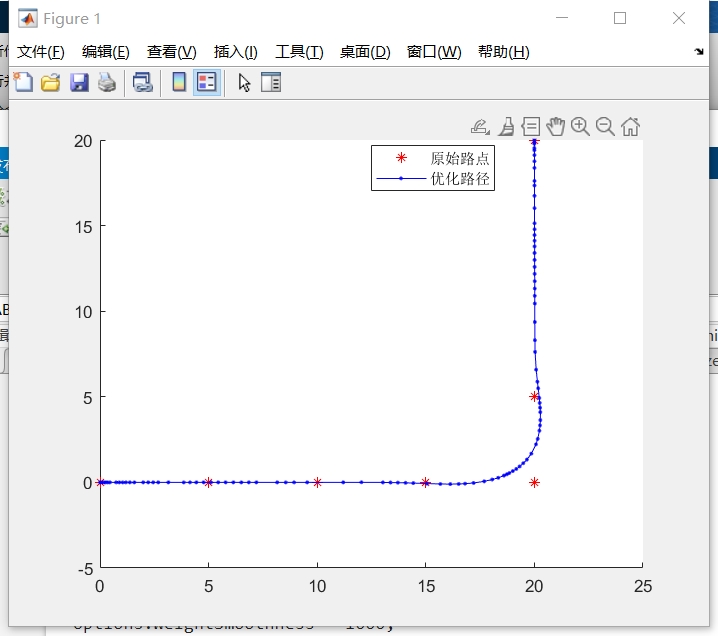
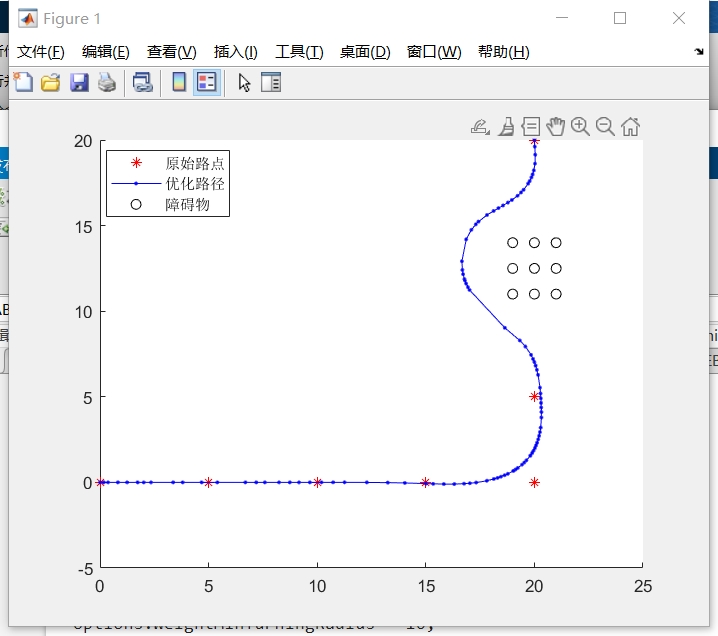
TEB算法原理与代码分析 详细文档+代码分析+matlab程序包 这段代码看起来是一个路径规划算法的实现。它使用了优化算法来寻找从起点到终点的最优路径,考虑了速度约束、运动学约束和障碍物避障。 首先,代码定义了起点和终点的位置,以及障碍物的位置(如果有)。然后,它设置了一些参数,如路径中的中间状态顶点数量N、最大速度MAX_V和时间步长dT。 接下来,代码初始化了一个状态向量x0,用于存储路径规划的初始解。它根据起点和终点的位置,以及N的数量,计算了中间状态顶点的位置和朝向,并将它们存储在x0中。同时,它还计算了每个状态顶点之间的时间间隔dT,并将其存储在x0中。 然后,代码使用优化算法(fminunc函数)来最小化一个成本函数(CostTEBFun函数)。这个成本函数考虑了时间最小约束、速度约束、运动学约束和障碍物避障。优化算法将调整状态向量x0的值,以找到使成本函数最小化的最优解x。 最后,代码绘制了路径规划的结果。它使用plot函数绘制了起点、中间状态顶点和终点的位置,使用quiver函数绘制了起点和中间状态顶点的朝向。如果有障碍物,它还使用plot函数绘制了障碍物的位置。 总结一下,这段代码实现了一个路径规划算法,用于寻找从起点到终点的最优路径。它考虑了速度约束、运动学约束和障碍物避障,并使用优化算法来搜索最优解。这个算法可以应用于机器人导航、自动驾驶等领域,解决路径规划问题。它涉及到的知识点包括优化算法、几何计算和路径规划算法。
引言
时间弹性带(Timed Elastic Band, TEB)是一种广泛应用于移动机器人轨迹优化的非线性优化方法。其核心思想是将路径建模为一条带有时间信息的“弹性带”,通过引入一系列软约束(如运动学约束、速度/加速度限制、避障要求等),在满足机器人动力学可行性的前提下,对初始路径进行平滑与优化。MATLAB 近年来在其导航工具箱中引入了基于 TEB 的路径优化函数,为开发者提供了高效、可配置的轨迹后处理能力。本文将深入解析该实现的架构设计、优化流程及关键功能模块,帮助读者理解其工程实现逻辑。
整体架构:基于图优化的软约束建模
TEB 的本质是一个带约束的非线性最小二乘问题。在 MATLAB 的实现中,这一问题被建模为一个带权图结构(Graph),其中:
- 节点(Vertices):包含两类变量:
- 位姿节点(Pose Nodes):表示机器人在 SE(2) 空间中的状态(x, y, θ)。
- 时间间隔节点(DeltaT Nodes):表示相邻位姿之间的时间差 Δt。
- 边(Edges):每条边对应一个软约束项,其误差函数衡量当前状态与理想状态的偏差。这些边包括:
1. 时间代价边:鼓励缩短总行程时间(最小化 Δt)。
2. 非完整运动学约束边:确保路径符合差速或类车模型的运动学特性。
3. 最小转弯半径约束边:防止路径曲率过大。
4. 速度与角速度约束边:限制线速度和角速度不超过设定阈值。
5. 加速度与角加速度约束边:包括路径中间段、起点和终点的加速度限制。
6. 障碍物安全边:确保路径点与障碍物保持安全距离。
所有约束均以软约束形式加入目标函数,通过用户可调的权重参数(如 WeightTime, WeightObstacles 等)平衡各项优化目标。
核心优化流程
TEB 优化过程采用内外双层迭代策略,兼顾路径拓扑调整与数值优化:
外层循环:路径结构自适应调整
外层循环负责动态调整路径的节点数量与分布,以适应局部几何复杂度:
- 节点插入:若某段 Δt 过大(超过参考值
ReferenceDeltaTime的 110%),则在该段插入新节点,细化轨迹。 - 节点合并:若某段 Δt 过小(低于参考值的 90%),且总节点数大于最小值,则合并相邻节点,简化轨迹。
- 此过程确保轨迹在曲率大或靠近障碍物区域有足够分辨率,而在平直区域保持简洁,有效控制计算复杂度。
内层循环:基于 Levenberg-Marquardt 的数值优化
内层循环使用 Error-Damped Levenberg-Marquardt (LM) 算法求解非线性最小二乘问题:
- 目标函数:总代价为所有边误差的加权平方和,即
$$C = \sum{i} wi \cdot \|e_i\|^2$$ - 雅可比矩阵:系统自动计算或数值近似各误差项对状态变量(位姿与 Δt)的导数。
- 无界优化:由于所有约束均为软约束,优化器无需处理硬边界,简化了求解过程。
关键功能模块详解
1. 障碍物处理机制
障碍物约束是 TEB 的核心优势之一。其实现包含以下策略:
- 障碍物预处理:将栅格地图转换为障碍物点列表,并根据地图分辨率动态调整安全裕度。
- 分层距离筛选:
- 近区(Inclusion Zone):距离小于
ObstacleSafetyMargin,直接产生惩罚。 - 中区(Middle Zone):距离介于
ObstacleInclusionDistance与ObstacleCutOffDistance之间,仅保留左右两侧最近障碍物以减少计算量。 - 远区(Cutoff Zone):忽略影响。
- 左右障碍物分离:通过叉积判断障碍物位于路径左侧或右侧,分别建立约束,提升避障鲁棒性。
2. 运动学与动力学约束
- 非完整约束:针对类车模型,约束相邻位姿间的运动必须满足无侧滑条件。
- 最小转弯半径:通过计算相邻位姿形成的圆弧半径,确保其不小于
MinTurningRadius。 - 加速度建模:利用三阶位姿差分估算线加速度与角加速度,并在起点/终点假设初/末速度为零,施加额外约束。
3. 时间与平滑性优化
- 时间最优:通过最小化 Δt 总和,隐式优化路径执行时间。
- 平滑性:通过高权重的“平滑性”项(实际体现在非完整约束与转弯半径约束中),抑制路径震荡,生成曲率连续的轨迹。
接口与使用
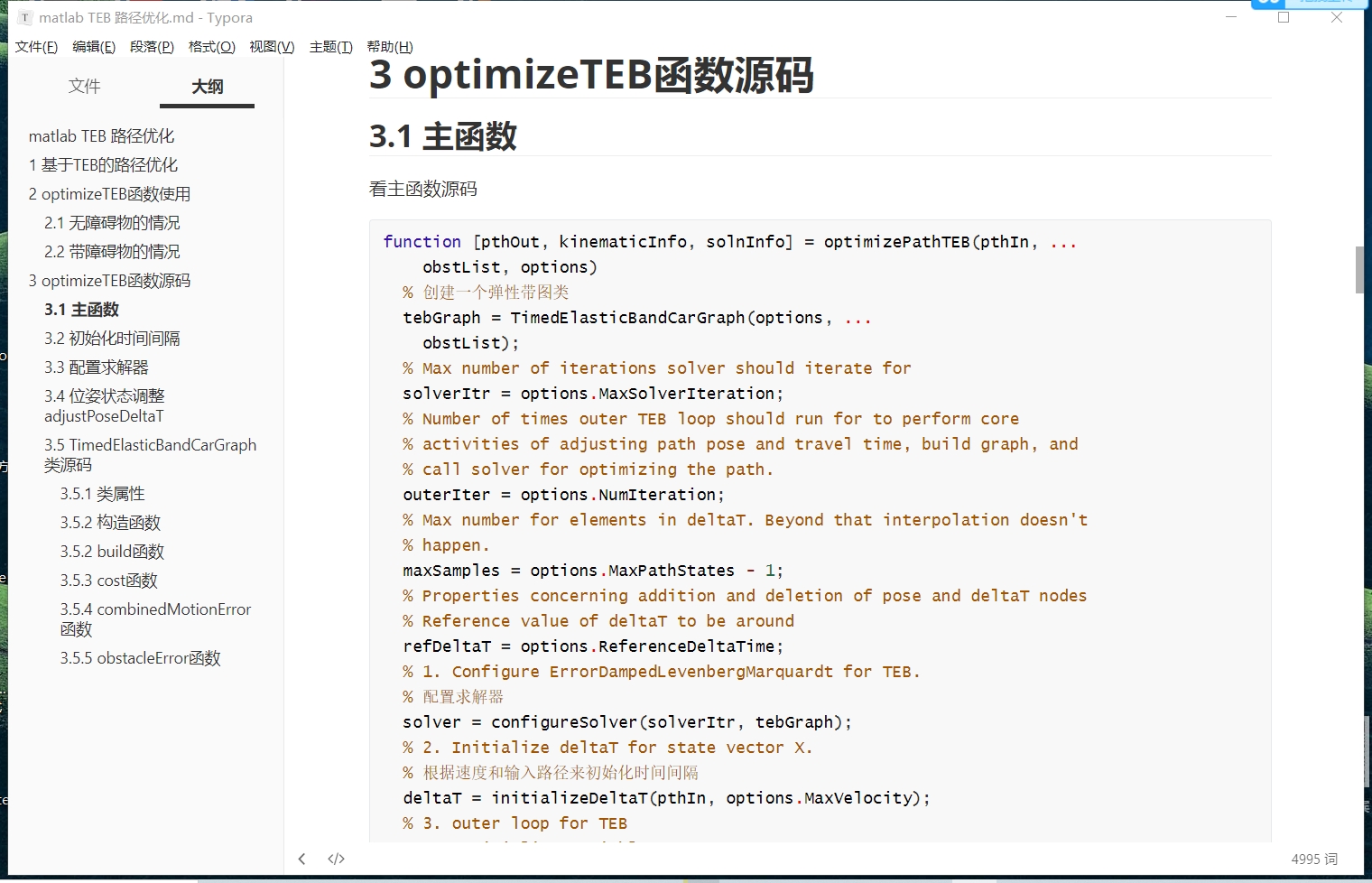
MATLAB 的 TEB 优化函数(如 optimizeTEB)提供简洁的调用接口:
[pathOut, kinematicInfo, solnInfo] = optimizeTEB(initialPath, obstacleList, options);用户只需提供:
- 初始路径(位姿序列)
- 障碍物列表
- 配置参数(速度/加速度限制、权重、安全距离等)
函数返回优化后的路径、运动学信息(速度、加速度)及求解统计信息,便于集成到高层规划框架中。
总结
MATLAB 中的 TEB 实现是一个工程化程度高、配置灵活的轨迹优化模块。它通过图优化框架统一处理多源约束,结合自适应节点调整与高效数值求解器,在保证实时性的同时生成动力学可行、安全平滑的轨迹。其设计充分体现了软约束优化在机器人运动规划中的强大能力,为自动驾驶、移动机器人等领域提供了可靠的底层支持。
TEB算法原理与代码分析 详细文档+代码分析+matlab程序包 这段代码看起来是一个路径规划算法的实现。它使用了优化算法来寻找从起点到终点的最优路径,考虑了速度约束、运动学约束和障碍物避障。 首先,代码定义了起点和终点的位置,以及障碍物的位置(如果有)。然后,它设置了一些参数,如路径中的中间状态顶点数量N、最大速度MAX_V和时间步长dT。 接下来,代码初始化了一个状态向量x0,用于存储路径规划的初始解。它根据起点和终点的位置,以及N的数量,计算了中间状态顶点的位置和朝向,并将它们存储在x0中。同时,它还计算了每个状态顶点之间的时间间隔dT,并将其存储在x0中。 然后,代码使用优化算法(fminunc函数)来最小化一个成本函数(CostTEBFun函数)。这个成本函数考虑了时间最小约束、速度约束、运动学约束和障碍物避障。优化算法将调整状态向量x0的值,以找到使成本函数最小化的最优解x。 最后,代码绘制了路径规划的结果。它使用plot函数绘制了起点、中间状态顶点和终点的位置,使用quiver函数绘制了起点和中间状态顶点的朝向。如果有障碍物,它还使用plot函数绘制了障碍物的位置。 总结一下,这段代码实现了一个路径规划算法,用于寻找从起点到终点的最优路径。它考虑了速度约束、运动学约束和障碍物避障,并使用优化算法来搜索最优解。这个算法可以应用于机器人导航、自动驾驶等领域,解决路径规划问题。它涉及到的知识点包括优化算法、几何计算和路径规划算法。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐

 4
4 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)