基于动态窗口算法的AGV仿真避障:设置起点与障碍物,实时局部规划与评价函数选择最优轨迹 希望...
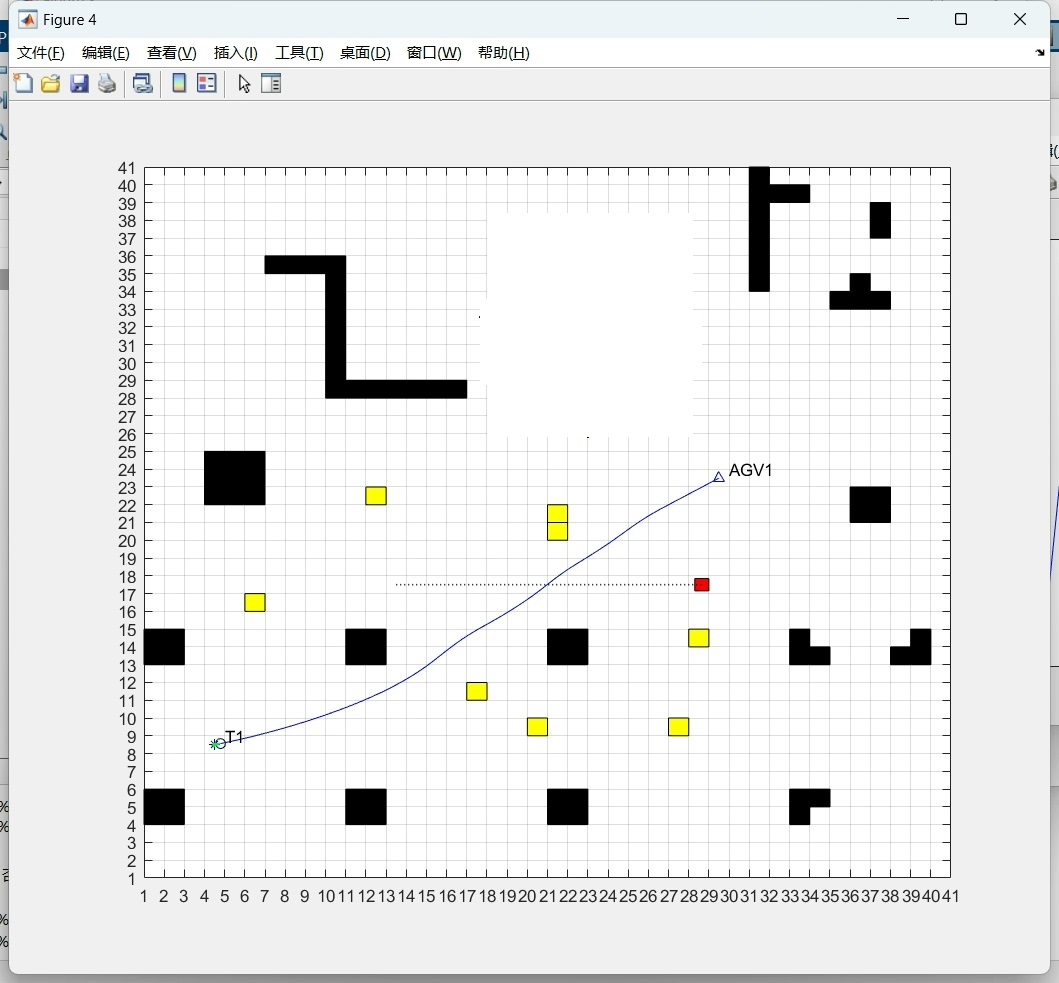
基于动态窗口算法的AGV仿真避障 可设置起点目标点,设置地图,设置移动障碍物起始点目标点,未知静态障碍物 动态窗口方法(DynamicWindowApproach) 是一种可以实现实时避障的局部规划算法,通过将轮式机器人的位置约束转化为速度约束,根据约束进行速度采样,并由一系列的选定速度的动作生成轨迹,结合评价函数选择评分最高的轨迹,实现执行最优速度的问题。 黄色是静态障碍物,红色是可移动障碍物
1. 系统概述与设计理念
多AGV动态窗口避障系统是一个基于MATLAB开发的综合性机器人路径规划仿真平台。该系统深度融合了全局路径规划与局部实时避障算法,构建了一个完整的AGV导航解决方案。系统核心设计理念在于通过分层决策架构实现多AGV在复杂环境中的协同作业——A*算法负责宏观层面的全局路径指引,而动态窗口算法(DWA)则处理微观层面的实时避障与运动控制。
基于动态窗口算法的AGV仿真避障 可设置起点目标点,设置地图,设置移动障碍物起始点目标点,未知静态障碍物 动态窗口方法(DynamicWindowApproach) 是一种可以实现实时避障的局部规划算法,通过将轮式机器人的位置约束转化为速度约束,根据约束进行速度采样,并由一系列的选定速度的动作生成轨迹,结合评价函数选择评分最高的轨迹,实现执行最优速度的问题。 黄色是静态障碍物,红色是可移动障碍物
系统支持用户自定义环境配置,包括栅格地图构建、静态障碍物布置、动态障碍物轨迹规划以及多AGV任务分配。特别值得关注的是,系统引入了AGV优先级机制,确保在多AGV可能发生路径冲突时,能够按照预设优先级进行智能调度,避免死锁和碰撞情况的发生。
2. 核心功能模块详述
2.1 环境建模与地图管理系统
系统采用离散化的栅格地图表示工作环境,每个栅格单元对应实际环境中的特定区域。地图管理系统具备以下核心功能:
- 多类型地图元素支持:系统定义了完整的语义地图体系,包括自由通道(0)、静态障碍物(1)、AGV起点(2)、AGV目标点(-1)以及未知静态障碍物(-2)。这种分类体系为后续的路径规划算法提供了清晰的环境认知基础。
- 动态地图更新机制:系统支持运行时动态修改地图状态,特别是在处理未知障碍物时,能够实时更新环境信息并影响AGV的决策过程。
- 可视化渲染引擎:通过MATLAB图形系统实现地图的实时可视化,不同地图元素采用差异化渲染策略——障碍物以实心黑色方块标示,AGV起点使用蓝色三角标记,目标点采用绿色圆圈,移动障碍物路径则用红色虚线显示。
2.2 全局路径规划子系统
基于改进型A*算法的全局路径规划子系统负责为每个AGV计算从起点到目标点的最优路径:
- 启发式搜索优化:传统的A*算法在本系统中得到了多方面改进。搜索方向从经典的8方向缩减为5方向,在保证路径质量的同时显著提升了搜索效率。同时,算法避免了斜向穿越障碍物顶点的危险行为,增强了路径的安全性。
- 路径平滑处理:系统实现了多级路径优化机制,通过直线化检测和冗余节点剔除,将原始的折线路径转化为更加平滑、适合AGV实际运动的轨迹。这种处理不仅减少了AGV的不必要转向,也提升了运行效率。
- 自适应评价函数:全局规划的评价函数引入了距离权重因子,使得路径搜索过程能够更好地平衡路径长度与安全性的关系。
2.3 局部实时避障核心引擎
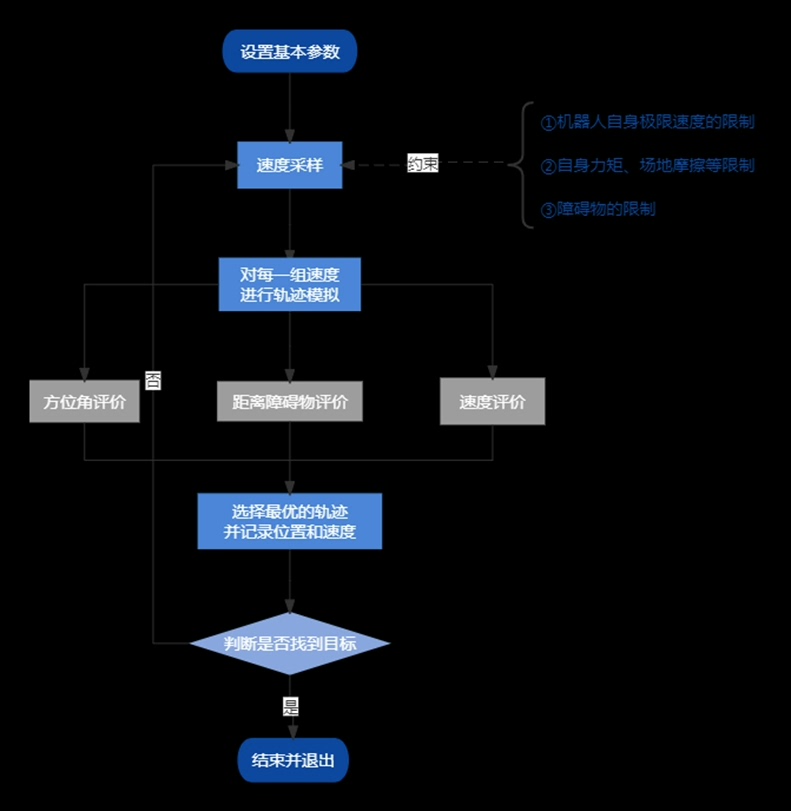
动态窗口算法(DWA)构成了系统的局部避障核心,该模块实现了以下关键功能:
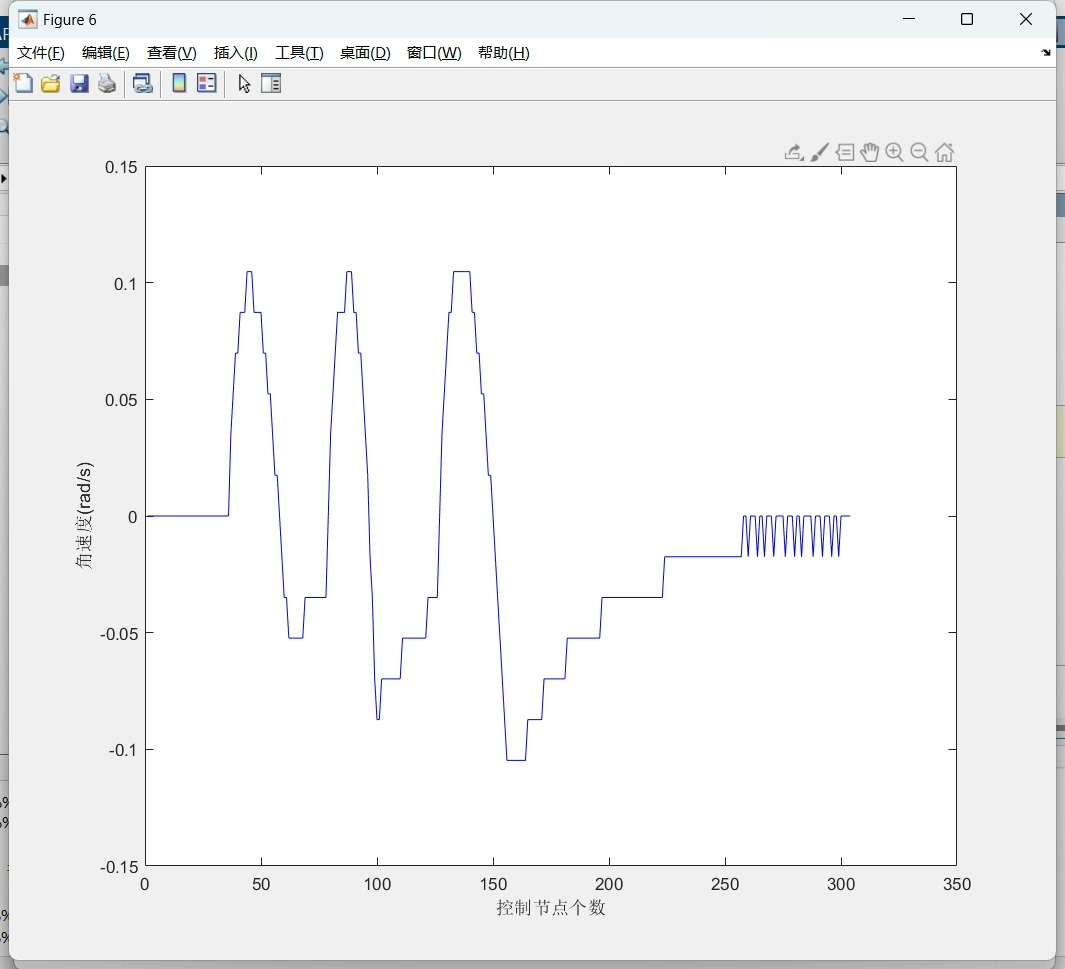
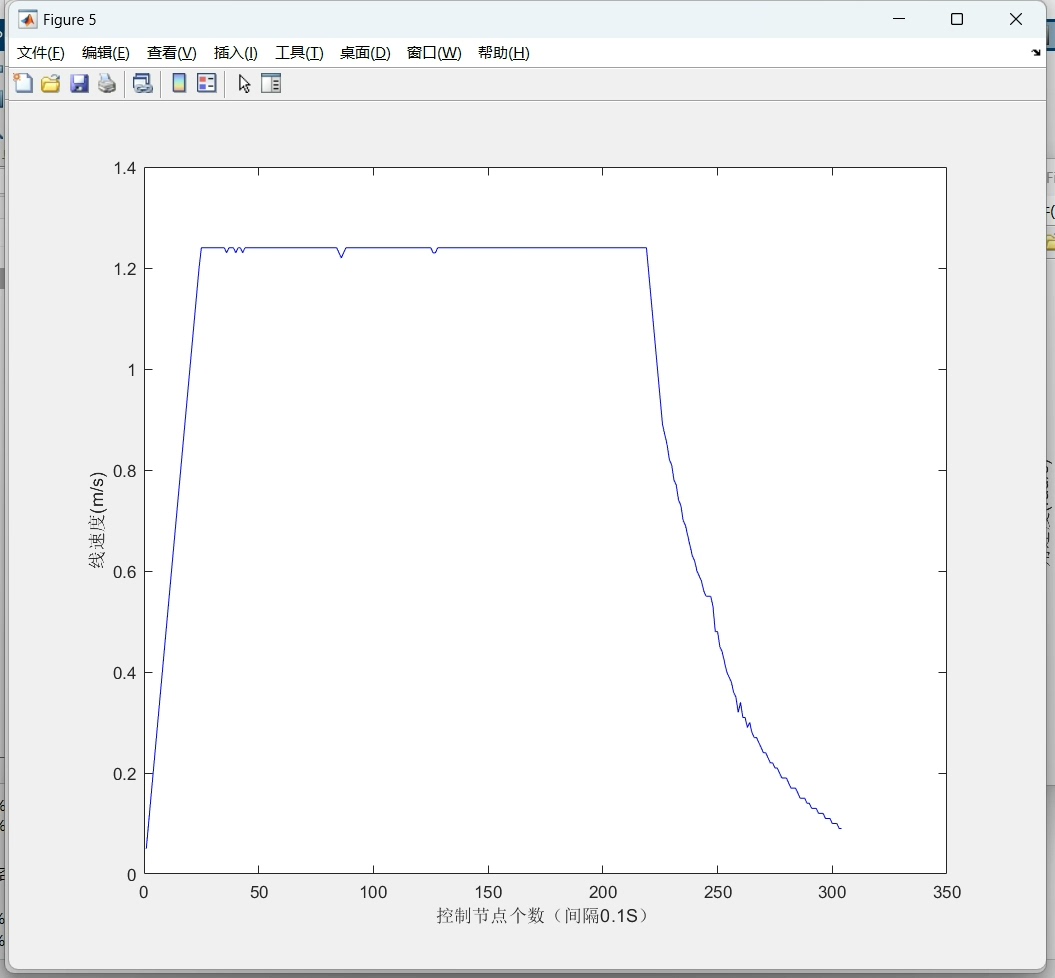
- 速度空间采样:算法首先基于AGV的当前运动状态和动力学约束,计算出可行的速度搜索空间。这个动态窗口综合考虑了AGV的最大速度、加速度限制以及制动距离等物理约束。
- 多轨迹预测评估:对于速度空间中的每个候选速度对(线速度和角速度),系统都会模拟生成对应的预测轨迹,并从三个维度进行综合评估:
- 目标导向性:评估轨迹朝向目标点的程度
- 安全距离性:评估轨迹与障碍物保持的安全距离
- 运动效率性:评估轨迹的运动平滑度和前进速度
- 最优决策机制:通过对所有候选轨迹的加权评分,系统选择综合得分最高的轨迹作为当前控制周期的执行方案。这种机制确保了AGV在复杂环境中能够同时兼顾目标趋近、障碍规避和运动效率。
2.4 多AGV协同调度系统
系统支持多AGV同时运行,并通过优先级机制实现协同调度:
- 冲突检测机制:系统实时监控所有AGV的相对位置和运动状态。当两个AGV之间的距离进入设定的安全阈值(如3米)范围内,且它们的运动方向存在交汇可能时(通过方向夹角判断,如小于100度),系统即判定存在潜在冲突。
- 优先级仲裁策略:预设的AGV优先级(如AGV1 > AGV2 > AGV3)在冲突发生时起到决策作用。低优先级AGV将主动进入暂停状态,等待高优先级AGV通过冲突区域。这种策略虽然简单,但在实际应用中能够有效避免死锁和碰撞。
- 非对称避让行为:高优先级AGV继续按照原定规划路径行驶,几乎不受低优先级AGV存在的影响,而低优先级AGV则需要承担主要的避让责任。这种非对称设计确保了系统整体运行效率。
2.5 动态障碍物处理模块
系统对动态障碍物的处理体现了环境适应能力:
- 移动障碍物轨迹规划:用户可以通过图形界面设置移动障碍物的起点和终点,系统内部使用A*算法为移动障碍物规划行进路径,确保其运动符合环境约束。
- 实时轨迹插值:移动障碍物的路径会被离散化为密集的轨迹点序列,每个控制周期按照预设速度沿轨迹移动。这种细粒度的控制使得AGV能够准确预测动态障碍物的短期运动趋势。
- 多障碍物类型统一处理:系统将静态障碍物、未知障碍物和动态障碍物统一纳入DWA的评价函数中,通过距离场计算实现一致的避障响应,简化了算法架构的同时保证了系统的可靠性。
3. 系统工作流程深度解析
系统的运行遵循严格的状态机流程,确保各个模块协调工作:
3.1 初始化阶段
系统启动后首先进行环境初始化:加载栅格地图数据,解析障碍物分布,初始化图形显示系统。这一阶段构建了完整的静态环境模型,为后续的路径规划和运动控制奠定基础。
3.2 交互配置阶段
用户通过图形化界面完成各项配置任务:设置各个AGV的起点和目标点,定义移动障碍物的运动轨迹,标记未知静态障碍物的位置。系统在这一阶段提供了丰富的视觉反馈,确保用户准确理解当前的环境状态。
3.3 多AGV并行执行阶段
这是系统的核心运行阶段,每个AGV独立运行以下循环过程:
- 环境感知:AGV获取当前位置、方向信息,并检测周围障碍物状态(包括静态障碍物、其他AGV和动态障碍物)
- 动态窗口计算:基于当前运动状态和物理约束,确定可行的速度搜索空间
- 轨迹生成与评估:对速度空间进行采样,生成候选轨迹并进行多目标优化评估
- 最优控制选择:选择综合评分最高的速度对作为当前控制输出
- 状态更新与冲突检测:更新AGV位置和姿态,检测与其他AGV的潜在冲突并执行优先级仲裁
- 可视化更新:实时刷新图形界面,显示AGV当前位置、历史轨迹和规划路径
3.4 仿真终止与性能分析
当所有AGV到达各自的目标位置后,系统自动终止仿真过程,并输出详细的性能统计数据,包括每个AGV的实际路径长度、运行时间、平均速度等关键指标。这些数据为用户评估系统性能和进行参数调优提供了重要依据。
4. 系统特色与技术创新
4.1 分层规划架构
系统采用的全局规划与局部避障相结合的分层架构,既保证了路径的全局最优性,又提供了应对动态环境的实时响应能力。这种架构在实际机器人导航系统中被广泛认可为最佳实践。
4.2 完整的障碍物处理体系
系统对障碍物的分类处理展现了工程实践的完整性:静态障碍物构成环境的基础约束,未知障碍物考验系统的鲁棒性,动态障碍物则挑战系统的实时响应能力。这种全面的障碍物处理能力使系统能够适应复杂的实际应用场景。
4.3 实用的多机协同策略
基于优先级的简单协同机制虽然在学术上不是最先进的,但在工程实践中被证明是可靠有效的。这种策略计算开销小、实现简单、可靠性高,特别适合对实时性要求较高的工业应用场景。
5. 应用前景与扩展方向
本系统作为一个完整的多AGV路径规划仿真平台,在多个领域具有应用价值:
- 学术研究:为路径规划算法、多机器人系统研究提供验证平台
- 教学演示:直观展示经典机器人导航算法的工作原理
- 工业仿真:为实际的AGV系统部署提供前期验证和参数调优
- 算法开发:作为新算法的对比基准和测试环境
未来的扩展方向包括引入更复杂的多机通信机制、实现分布式决策架构、增加能耗优化目标以及支持三维环境导航等。系统的模块化设计为这些扩展提供了良好的基础架构支持。
该系统通过精心设计的算法架构和完整的功能实现,展现了现代机器人导航系统的核心要素,为理解和开发实际AGV控制系统提供了宝贵的技术参考和实践基础。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐
 11
11 0
0- 0



 已为社区贡献10条内容
已为社区贡献10条内容

所有评论(0)