跑酷、拧旋钮、耍杂技!北京具身天工3.0重磅亮相,开源生态剑指行业乱象
摘要:本文深度解析北京人形机器人创新中心(X-Humanoid)重磅发布的具身天工3.0人形机器人,解析高扭矩关节、慧思开物平台、Pelican-VL模型的核心技术突破,解读其全维度开源战略的布局逻辑与行业意义,对比前代天工Ultra的定位差异,剖析其核心优势与开源生态运营、行业竞争等潜在挑战,探讨具身天工3.0对中国人形机器人行业的影响与未来发展趋势,为技术从业者、行业观察者提供最专业、最全面的深度解读,助力了解2026年人形机器人赛道的最新技术革新与产业发展方向。
一、从赛道冠军到全能多面手:具身天工3.0的定位跃迁
具身天工3.0的重磅发布,并非孤立的技术升级,而是北京人形机器人创新中心战略转型的重要信号——从“实验室里程碑”向“产业化落地”的全面跨越,这一点,既体现在与前代机型的定位差异上,也彰显在其“更开放、更好用”的核心目标中。
回顾前代产品,去年斩获北京半程马拉松冠军的天工Ultra,曾以极致的速度与耐力惊艳行业,其中100米短跑仅需21.5秒的成绩,成为当时人形机器人速度领域的标杆。但彼时的机型,核心聚焦于运动性能的突破,更多承担着“技术验证”的角色,离工业场景的实际应用仍有差距。
而具身天工3.0的推出,彻底打破了这一局限。这款身高169厘米、体重62公斤、配备43个自由度的全尺寸人形机器人,以“具身智能”为核心,实现了从“能跑能跳”到“能干活、会干活”的跨越式升级。其背后,是北京人形机器人创新中心的战略调整——在国内人形机器人行业陷入“低质量重复研发”“IPO热潮盲目跟风”的当下,中心立志以标准化、开源化打破行业壁垒,推动人形机器人从实验室走向千行百业,这也是其斩获1亿美元商业融资后,迅速推出新品的核心底气。
1.1 核心定位:拒绝“单一炫技”,聚焦“实用落地”
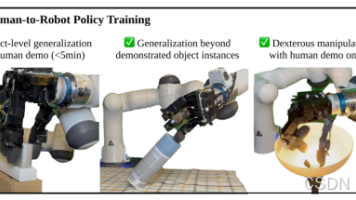
具身天工3.0的核心定位是“新一代通用机器人平台”,区别于前代机型的“性能标杆”定位,其所有技术突破都围绕“工业实用性”与“场景适配性”展开。无论是高动态的跑酷动作,还是精细的旋钮操作,本质上都是为了验证其在复杂工业场景、商用服务场景中的适配能力——既能在工厂车间、仓库等环境中灵活穿梭、处理复杂任务,也能在家庭、服务场所中完成精细操作,真正实现“一脑多机、全域适配”的规模化应用目标。
与此同时,依托北京人形机器人创新中心的资源优势,具身天工3.0还承担着“行业规范者”的角色。针对当前行业内接口封闭、协议不兼容、研发重复率高的痛点,其以开放协同为核心,打造标准化的软硬件平台,试图终结行业碎片化乱象,推动产业进入“协同创新、快速落地”的新阶段。
二、技术解析:不止于跑酷,具身天工3.0的三大核心突破
具身天工3.0之所以能实现“高动态运动”与“精细操作”的双重突破,核心得益于硬件、软件、智能算法的协同升级。不同于单纯的性能堆砌,其技术设计始终围绕“自主决策、灵活适配、实用落地”三大核心,每一项突破都直击行业应用痛点,具体解析如下:
1. 硬件突破:高扭矩关节+拓展接口,兼顾力量与适配性
硬件层面,具身天工3.0的核心优势在于“高扭矩一体化关节”的规模化应用。这款机器人配备的高扭矩集成关节,不仅能提供充足的动力支撑,让其轻松完成单手翻越1米高障碍物、空翻、跳舞甚至耍乒乓球等高强度高动态动作,还能精准控制力度,实现拧小旋钮、抓取易碎物品等精细操作,兼顾力量与灵活性。这种关节设计,既解决了传统人形机器人“要么有力不灵活,要么灵活没力量”的痛点,也为其适配工业、服务等多元场景提供了硬件基础。
同时,为提升场景适配性,具身天工3.0预留了多类型拓展接口,支持各类外设工具灵活接入,可快速适配特种作业、工业制造、商用服务等不同场景需求,实现与行业主流系统的无缝衔接。无需对本体进行大规模改造,仅通过接入不同外设,就能完成抓取、焊接、检测等多种任务,大幅降低了场景适配成本,加速了产业化落地进程。
2. 软件突破:慧思开物平台,构建“感知-决策-执行”闭环
软件层面,具身天工3.0的核心支撑是北京人形机器人创新中心自研的“慧思开物”通用具身智能平台。这款软件栈的最大突破,在于构建了“感知-决策-执行”的全链路闭环,彻底摆脱了传统机器人“预编程操作”的局限,实现了真正的全自主作业。
具体而言,慧思开物平台能够实时接收机器人视觉、触觉等多维度感知数据,通过智能算法快速分析场景环境、判断任务需求,自主规划操作路径,再通过底层控制系统驱动关节执行动作,整个过程无需人工干预。例如,在陌生环境中,机器人能够自主识别障碍物,规划最优通行路径;在执行拧旋钮任务时,能够自主判断旋钮的大小、松紧,调整发力力度,确保操作成功。这种自主决策能力,让具身天工3.0能够适配复杂多变的真实场景,真正具备了“实用价值”。
此外,该软件平台还支持ROS2、MQTT、TCP/IP等主流通信中间件和端云协议,完全兼容行业主流开发框架,合作伙伴无需进行底层技术重构,即可根据自身场景需求开展定制化二次开发,显著降低了开发门槛、缩短了开发周期。
3. 智能突破:Pelican-VL模型+RoboMIND数据集,赋能自主推理
具身天工3.0的“自主决策能力”,核心来源于两大智能组件的加持——Pelican-VL视觉语言模型(VLM)与RoboMIND数据集。其中,Pelican-VL作为国内规模领先的开源具身多模态大脑模型,覆盖7B、72B参数规模,采用开创性的DPPO(刻意练习策略优化)训练范式,通过“强化学习探索弱点+监督微调补齐短板”的循环训练,实现了性能的大幅提升,其平均性能超越GPT-5和Google Gemini等闭源系列模型,在多模态理解、空间-时间认知、具身交互等方面表现突出。
借助Pelican-VL模型,具身天工3.0能够精准理解视觉图像与语言指令,实现物理推理、空间关系判断和动作规划。例如,在封闭厨房场景中,它能够分辨果蔬摆放位置,规划取物和放置动作;在长程任务中,能够零样本生成可行的操作方案,甚至在操作失败后自主纠错、迭代优化。而RoboMIND数据集作为其训练基础,提供了海量高质量的具身智能训练数据,进一步提升了模型的泛化能力和决策准确性,让机器人能够快速适配不同场景的任务需求。
三、开源战略:剑指行业乱象,构建协同共赢的产业生态
如果说技术突破是具身天工3.0的“硬实力”,那么开源战略就是其“软实力”,也是其区别于其他机型的核心差异化优势。在北京近期明确警示“重复、低质量机器人项目”的背景下,北京人形机器人创新中心选择以“全面开源”布局,不仅是自身战略的重要一步,更是试图以标准化推动行业规范化发展的重要举措。
3.1 开源布局:全维度开放,打破行业技术壁垒
具身天工3.0的开源布局,呈现“全维度、高实用、无壁垒”的特点,不同于行业内部分企业“形式主义开源”(仅开放部分代码或图纸),其真正实现了核心资源的全面开放。目前,北京人形机器人创新中心已开源了具身天工3.0的多项核心组件,包括机器人物理设计蓝图、Pelican-VL视觉语言模型、RoboMIND数据集,以及运控框架、世界模型等关键技术成果,形成了全栈式开源体系。
这种全维度开源,意味着科研机构、高校、企业等合作伙伴,能够直接获取机器人的核心设计资料和技术资源,无需从零开始研发,大幅降低了研发成本和门槛。例如,企业可以基于开源的物理设计蓝图,快速迭代自身产品;科研机构可以基于Pelican-VL模型和RoboMIND数据集,开展具身智能算法的深入研究;开发者可以借助开源工具链,快速进行二次开发,加速技术成果转化。
3.2 开源目的:终结碎片化,推动产业规模化落地
具身天工3.0的开源战略,核心目的并非“炫技”,而是“解决行业痛点、推动产业升级”。当前,中国人形机器人行业正处于快速发展期,但同时也陷入了“盲目跟风、重复研发、碎片化严重”的困境——许多企业为抢占赛道,纷纷推出类似产品,但大多存在接口封闭、协议不兼容、核心技术薄弱等问题,不仅浪费大量研发资源,也制约了产业的规模化落地。
北京人形机器人创新中心的开源布局,正是为了破解这一困境。通过开放标准化的软硬件平台,让所有合作伙伴能够在同一基准上协同创新,避免重复研发,同时实现“一次开发、多场景适配”,加速人形机器人在工厂、仓库、家庭等场景的部署应用。例如,其开源的软件协议的兼容主流框架,硬件预留拓展接口,能够让不同企业的产品实现互联互通,推动“一脑多机”的规模化应用,为行业提供标准化的基础平台。
四、行业对比与未来展望:具身天工3.0能否改写行业格局?
具身天工3.0的发布,无疑为中国人形机器人行业注入了新的活力,但在“IPO热潮”与“同质化竞争”的双重背景下,其开源战略能否成功,能否真正推动行业规范化发展,仍面临诸多考验。我们从“核心优势”“潜在挑战”“行业影响”三个维度,展望其未来发展路径。
4.1 核心优势:三大壁垒,奠定行业领先地位
优势一:技术壁垒,兼顾性能与实用性。具身天工3.0实现了高动态运动与精细操作的双重突破,慧思开物平台、高扭矩关节、Pelican-VL模型的协同应用,使其在自主决策、场景适配等方面处于行业领先水平,尤其是“感知-决策-执行”的闭环设计,大幅提升了其实际应用价值,区别于传统机型的“单一炫技”。
优势二:开源壁垒,打破行业碎片化。其全维度开源布局,配套完善的开发文档、工具链及低代码开发平台,不仅降低了行业研发门槛,更试图打造标准化的行业基准,这种“开放协同”的模式,短期内难以被竞争对手复制,也契合当前行业“协同创新”的发展趋势。
优势三:资源壁垒,助力规模化落地。北京人形机器人创新中心的平台优势、1亿美元商业融资的资金支撑,以及Pelican-VL模型、RoboMIND数据集等核心资源的积累,为具身天工3.0的技术迭代、生态建设和规模化落地提供了有力保障。同时,其“一脑多机”的调度能力,已在天易2.0机型的工业测试中得到验证,为后续规模化应用奠定了基础。
4.2 潜在挑战:两大考验,决定长期发展上限
挑战一:开源生态运营难度大。开源并非“一放了之”,后续需要持续投入大量人力、物力,提供技术支持、更新开发文档、收集合作伙伴反馈,优化平台性能。目前,行业内仍存在“开源易、运营难”的痛点,具身天工3.0能否吸引足够多的科研机构、企业参与,能否形成高效的协同创新氛围,能否避免“开源后无人问津”的困境,仍是未知。
挑战二:行业竞争与标准化落地难。当前,中国人形机器人行业正处于IPO热潮中,许多企业纷纷布局人形机器人赛道,其中不乏大型科技企业和老牌机器人企业,它们凭借自身资源优势,可能推出类似的开源平台,挤压具身天工3.0的市场空间。同时,行业标准化的落地需要多方协同,如何推动更多企业认可并采用其开源标准,打破现有“各自为战”的格局,仍是其面临的核心挑战。
4.3 未来展望:开源引领,推动行业进入规模化落地新阶段
短期来看,具身天工3.0的核心任务是“完善开源生态、验证场景应用”。一方面,持续优化慧思开物平台、Pelican-VL模型的性能,完善开源文档和技术支持,吸引更多合作伙伴参与二次开发,扩大开源生态规模;另一方面,加快在工厂、仓库等工业场景的测试与部署,验证其实际应用价值,积累场景落地经验,推动天易2.0与具身天工3.0的协同应用,实现“一脑多机”的规模化试点。
长期来看,其核心目标是“成为行业标准化基准、推动产业规模化落地”。通过持续深化开源战略,推动软硬件平台的标准化,终结行业碎片化乱象,让更多企业能够基于其平台快速实现技术成果转化;同时,拓展家庭服务、特种作业等更多应用场景,实现“千行百业皆可用”的目标,推动中国人形机器人产业从“实验室阶段”全面进入“产业化阶段”。
对整个人形机器人行业而言,具身天工3.0的发布具有开创性意义:它不仅证明了人形机器人能够实现“实用化、自主化”的突破,更以开源战略为行业提供了全新的发展思路——拒绝低质量重复研发,坚持协同创新、开放共赢,才能推动产业快速升级。如果能够破解生态运营、标准化落地等核心挑战,具身天工3.0有望成为中国人形机器人行业的“标准化标杆”,改写行业发展格局,助力中国在全球人形机器人赛道中占据领先地位。
相关研报参考:
2025具身智能发展全景报告:从技术探索到场景落地,开启通用智能新征程


DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐

 16
16 0
0- 0



 已为社区贡献64条内容
已为社区贡献64条内容

所有评论(0)