具身智能:AI从虚拟走进现实
本文分享了作者参与Datawhale具身智能课程的学习心得。文章从"缸中之脑"概念切入,阐述了具身智能(Embodied AI)让AI通过身体与环境交互的全新学习方式。作者用淋浴水温调节的生动例子解释了PID控制算法的原理,并记录了在"算力自由"平台上运行Habitat仿真环境的实践过程,包括通过VNC连接云端实例、运行Demo控制虚拟机器人等操作。文章展现
【Datawhale 具身智能】Task 1 学习笔记:从“缸中之脑”到走进现实
大家好,我是 Q。最近加入了 Datawhale 的具身智能入门课程,想和大家聊聊我这两天“入坑”具身智能的一些碎碎念,以及在“算力自由”平台上折腾 Habitat 仿真环境的一点实战记录。
一、 具身智能:给 AI 装上“身体”
说实话,在接触这个概念之前,我对 AI 的印象还停留在 ChatGPT 那个对话框里。它博学、聪明,但总感觉缺了点什么——它像是一个被关在服务器里的“缸中之脑”,知道“苹果”是红的、甜的,但它从未真正拿起过一个苹果,感受过那份沉甸甸的重量。
具身智能(Embodied AI) 给了我一种全新的震撼。简单来说,它就是 “大脑 + 身体”。
这不仅仅是给 AI 装上轮子或者机械臂那么简单。它意味着 AI 像我们人类婴儿一样,不再只是通过“读书”(数据)来学习,而是通过“摸爬滚打”(与物理环境交互)来认识世界。
- 身体(Body) 是它的感知和行动的接口,比如摄像头是眼睛,机械臂是手。
- 大脑(Brain) 是它的灵魂,现在有了大模型(LLM)的加持,这个大脑正变得越来越像人。
- 环境(Environment) 是它成长的舞台,哪怕跌跌撞撞,也是学习的一部分。
看着波士顿动力的 Atlas 后空翻,或者特斯拉的 Optimus 叠衣服,我真切地感觉到:AI 正在走出屏幕,走进我们的物理世界。
二、 重新认识 PID:控制算法其实很“生活”
在具身智能里,光有聪明的大脑还不行,还得有精准的控制。这就不得不提经典的 PID 控制算法。
以前上课学 PID,满脑子都是公式。现在结合具身智能再看,发现它其实特别有“生活哲理”。
想象一下我们在调节淋浴水温:
-
P (比例) —— 关注当下:
水太凉了(误差大),你会猛地把龙头往热的方向拧(输出大)。P 就是这么直接,误差多大,力气就多大。但光靠 P 容易过头,或者永远差那么一点点(稳态误差)。 -
I (积分) —— 积累过去:
如果你发现水温虽然热了一点,但总是达不到你想要的温度(存在稳态误差),你会慢慢地、一点点地继续往热的方向修整。I 就是那个有耐心的修正者,它会积累过去的误差,直到问题彻底解决。 -
D (微分) —— 预测未来:
当你猛拧龙头,感觉水温升得太快(变化率大),快要烫猪皮了!你会下意识地往回回调一点,防止过热。D 就是这个“预判家”,它能看到趋势,提前踩刹车,防止“超调”。
在机器人身上,无论是关节的转动还是平衡的维持,背后都有 PID 三兄弟在默默配合。虽然现在有了强化学习(RL)这些高大上的手段,但 PID 依然是那个最稳健的基石。
三、 实战:在“算力自由”上折腾 Habitat
理论看完了,手痒想实操。这次课程推荐用 Datawhale 联合“算力自由”平台提供的 Habitat 镜像。Meta 的这个 Habitat 平台在圈内很有名,专门做室内导航仿真的。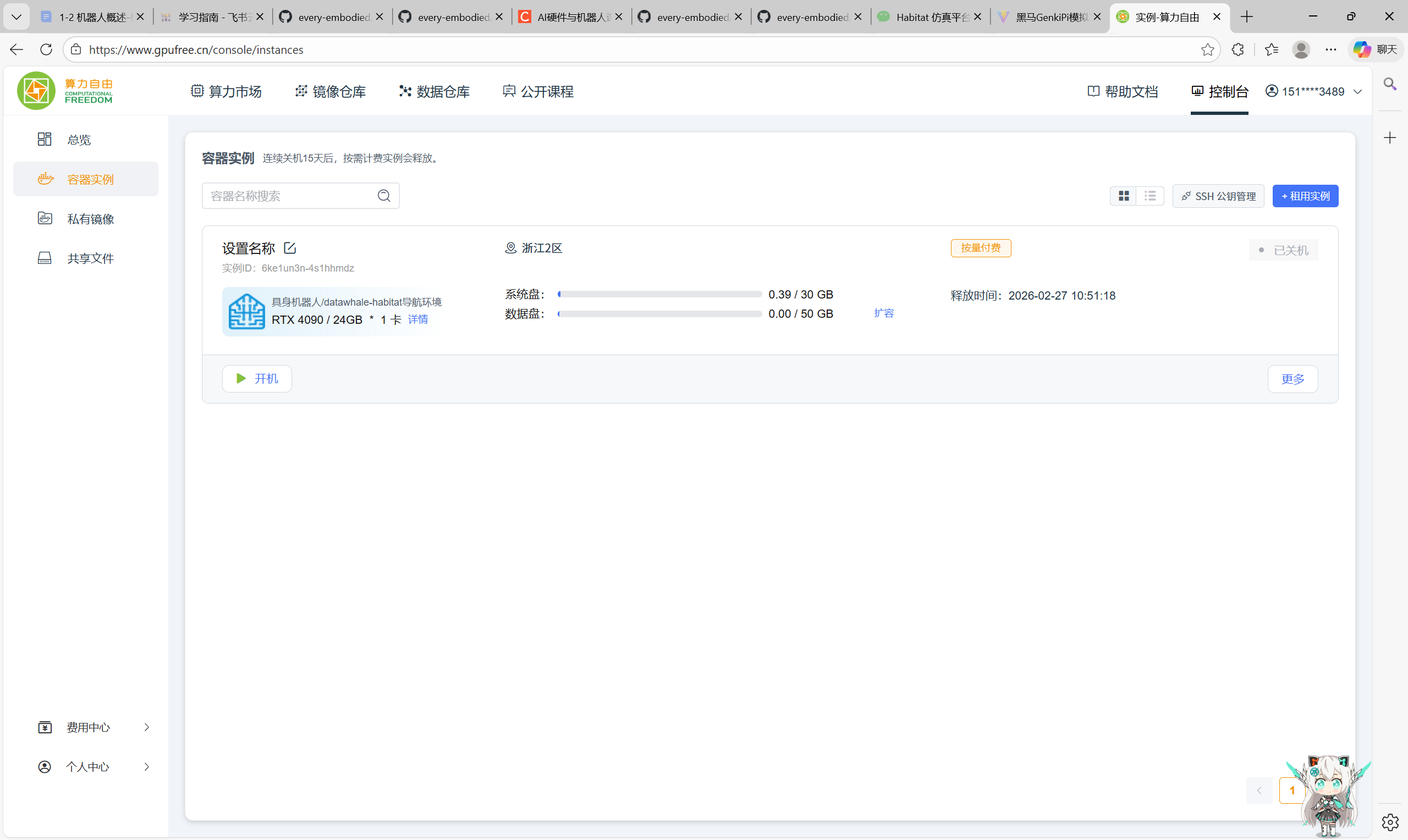
1. 启动环境:虽然是云端,但体验很丝滑
在平台上租了个 RTX 4090 的实例(不得不说,4090 跑仿真确实爽)。开机后直接通过 VNC 连上桌面,这一点对新手很友好,毕竟能看到图形化界面才更有实感嘛。
(刚连上 VNC 的样子,就像在操作自己的电脑)
2. 跑通 Demo:机器人动起来了!
进入代码目录,执行 python habitatlab_test.py。
那一刻还是挺激动的!屏幕上弹出了一个小窗口,展示了机器人的第一人称视角。
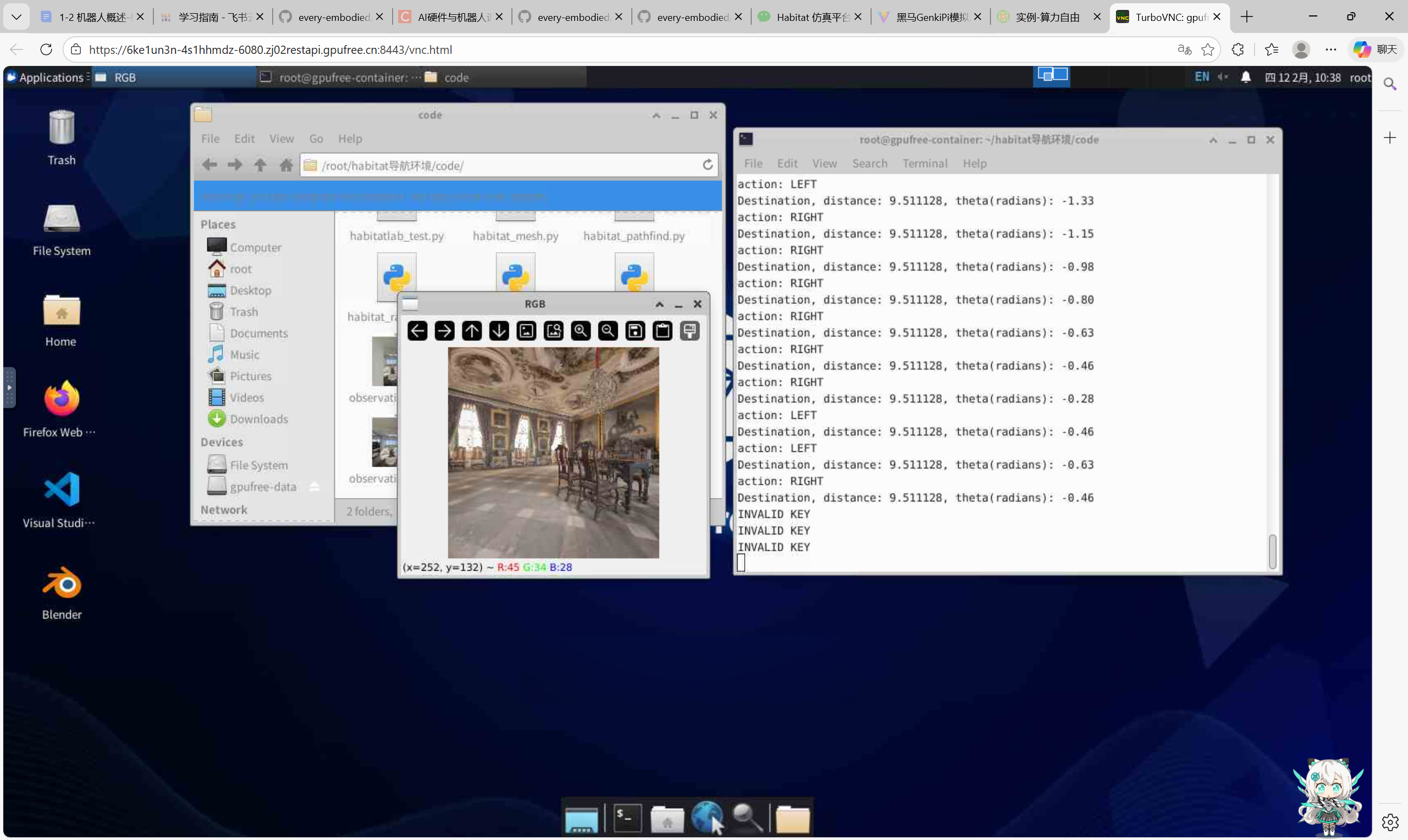
(终端敲下命令,见证奇迹的时刻)
我试着按 w a d 键,画面里的视角随之移动。虽然只是简单的移动,但这种**“我正在控制一个虚拟世界里的智能体”**的感觉非常棒。
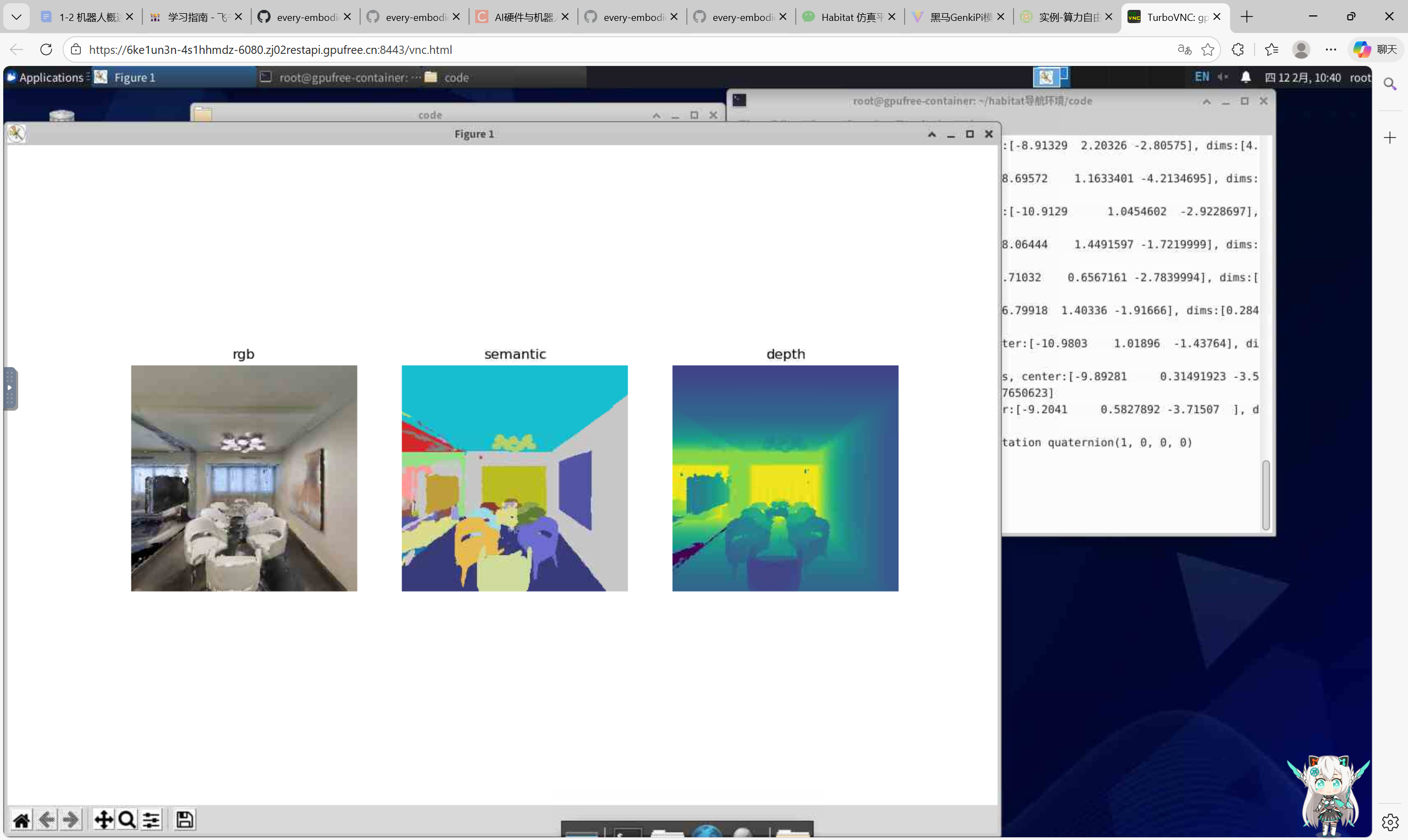
(这是机器人看到的室内场景,渲染效果还不错)
最后跑完脚本,系统生成了一个 MP4 视频。我用桌面上的播放器打开看了一下刚才的轨迹回放,满满的成就感。
四、 总结
这次 Task 1 的任务虽然不算难,但算是一次完整的“破冰”。从理解概念到动手跑通仿真,我对具身智能的轮廓更清晰了。
大家一起加油鸭!🦆
本文是 Datawhale 具身智能学习笔记,感谢 Datawhale 和 算力自由 提供的学习资源。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐



 17
17 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)