探索信捷XD3 PLC驱动六轴机器人:梯形图与C语言的交织之旅
信捷XD3 PLC驱动的六轴机器人项目,融合了梯形图的直观逻辑控制、C语言的复杂算法实现以及维纶通触摸屏的便捷人机交互,真的是一个非常有挑战性但又充满乐趣的项目。它需要我们对PLC编程、C语言以及人机交互都有深入的理解和掌握。希望我的分享能给正在研究类似项目的小伙伴们一些启发,大家一起交流进步!PLC的六轴机器人,信捷XD3的,有梯形图、有C语言,示较器是维纶通的触摸屏这个比较复杂,需要非常好的基
PLC的六轴机器人,信捷XD3的,有梯形图、有C语言,示较器 是维纶通的触摸屏 这个比较复杂,需要非常好的基础。
最近在研究信捷XD3 PLC驱动的六轴机器人项目,那过程可真是充满挑战,因为它涉及到梯形图和C语言,还搭配维纶通的触摸屏作为示教器,这可真不是一般的复杂,没有扎实的基础还真hold不住。今天就来跟大家分享分享我的一些经验和发现。
一、硬件组合的奥秘
信捷XD3 PLC作为核心控制器,它有着不错的性能和丰富的指令集,非常适合工业自动化控制场景。而六轴机器人呢,通过多个关节的协同运动,能够完成各种复杂的任务。再加上维纶通的触摸屏,操作人员可以直观地进行参数设置、任务示教等操作,让整个系统更加人性化。
二、梯形图:逻辑控制的基石
梯形图对于PLC编程来说就像积木一样,通过不同的组合搭建出完整的控制逻辑。以控制六轴机器人的运动为例,我们可以利用梯形图来实现机器人的基本动作,比如手臂的伸缩、旋转等。
// 假设X0为启动按钮,Y0控制机器人手臂伸出
LD X0
OUT Y0这段简单的梯形图代码意思就是当启动按钮X0被按下时(LD X0 读取X0的状态),输出Y0信号,从而控制机器人手臂伸出(OUT Y0)。在实际项目中,逻辑会复杂得多,可能会涉及到多个条件判断、互锁逻辑等。比如我们要确保机器人手臂在完全收回的情况下才能进行旋转动作,就需要更多的触点和线圈来实现这种逻辑关系。
// 假设X1为手臂收回到位信号,X2为旋转允许信号,Y1控制手臂旋转
LD X1
AND X2
OUT Y1这里LD X1读取手臂收回到位信号,AND X2表示只有当手臂收回到位且旋转允许信号X2都满足时(逻辑与关系),才会输出Y1信号控制手臂旋转。这种逻辑控制在梯形图里通过简单的触点和线圈连接就能清晰表达,非常直观。
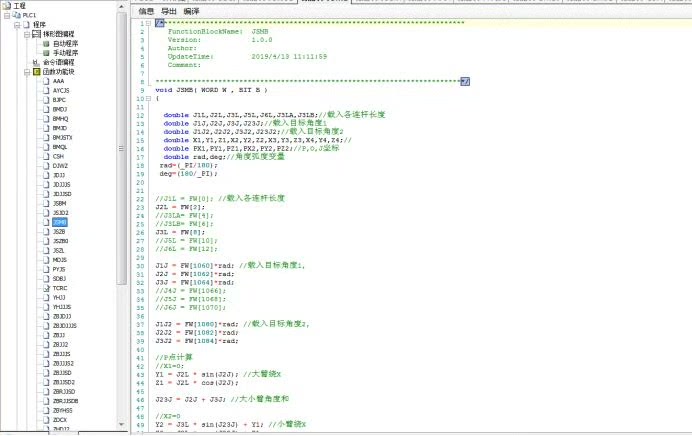
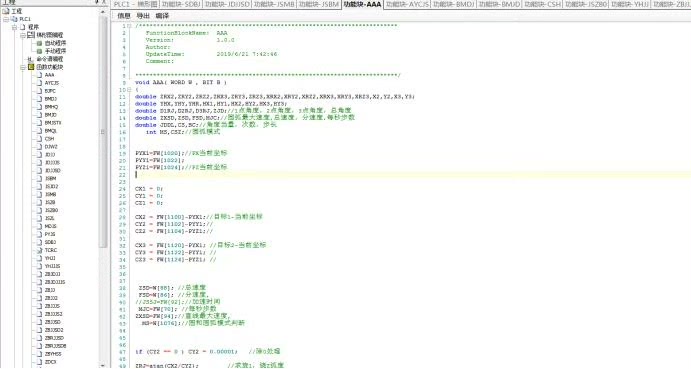
三、C语言:更灵活高效的实现
虽然梯形图很直观,但对于一些复杂的算法和数据处理,C语言就派上用场了。例如,我们要对六轴机器人的运动轨迹进行精确规划,就需要用C语言来编写算法。
#include <stdio.h>
// 定义结构体表示六轴机器人的关节角度
typedef struct {
float joint1;
float joint2;
float joint3;
float joint4;
float joint5;
float joint6;
} RobotJoints;
// 函数:根据目标位置计算关节角度
void calculateJoints(RobotJoints *target, float x, float y, float z) {
// 这里省略复杂的运动学计算逻辑
// 简单示例,实际计算需要根据机器人的结构参数和运动学模型
target->joint1 = x;
target->joint2 = y;
target->joint3 = z;
// 其他关节角度计算...
}
int main() {
RobotJoints targetJoints;
float targetX = 10.0;
float targetY = 20.0;
float targetZ = 30.0;
calculateJoints(&targetJoints, targetX, targetY, targetZ);
printf("Joint 1: %f\n", targetJoints.joint1);
printf("Joint 2: %f\n", targetJoints.joint2);
printf("Joint 3: %f\n", targetJoints.joint3);
// 打印其他关节角度...
return 0;
}在这段C语言代码里,我们首先定义了一个结构体RobotJoints来存储六轴机器人各个关节的角度。然后calculateJoints函数根据目标位置(这里简单用x、y、z表示)来计算关节角度,当然实际项目中这个计算会依据机器人具体的运动学模型,非常复杂。在main函数里,我们设定了目标位置,并调用calculateJoints函数得到目标关节角度,最后打印出来。通过C语言,我们可以实现更复杂的数学运算和数据处理,为机器人的精确控制提供支持。
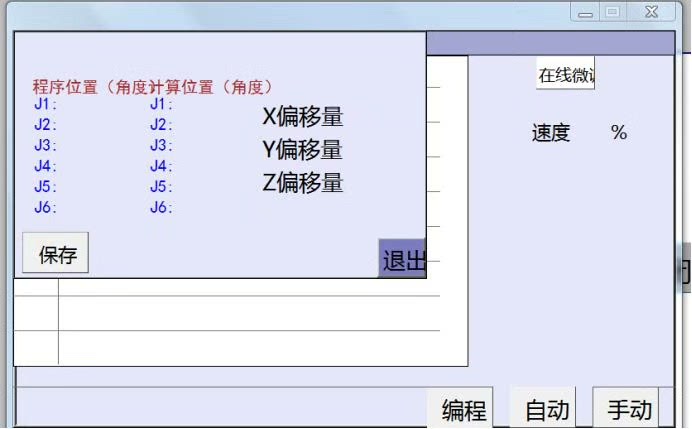
四、维纶通触摸屏:人机交互的窗口
维纶通触摸屏作为示教器,极大地方便了操作人员对机器人的控制。我们可以在触摸屏上设计各种界面,比如主菜单、参数设置界面、手动操作界面等。通过触摸屏与PLC的通信,将操作人员输入的参数、指令等传递给PLC,进而控制机器人的运行。比如在参数设置界面,操作人员可以输入机器人运动速度、加速度等参数,这些参数通过通信协议发送给PLC,PLC再根据这些参数调整机器人的运动。
五、总结
信捷XD3 PLC驱动的六轴机器人项目,融合了梯形图的直观逻辑控制、C语言的复杂算法实现以及维纶通触摸屏的便捷人机交互,真的是一个非常有挑战性但又充满乐趣的项目。它需要我们对PLC编程、C语言以及人机交互都有深入的理解和掌握。希望我的分享能给正在研究类似项目的小伙伴们一些启发,大家一起交流进步!
PLC的六轴机器人,信捷XD3的,有梯形图、有C语言,示较器 是维纶通的触摸屏 这个比较复杂,需要非常好的基础。




DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐



 8
8 0
0- 0



 已为社区贡献4条内容
已为社区贡献4条内容

所有评论(0)