探索三维RRT路径规划算法:RRT、RRT*与双向RRT
三维RRT路径规划算法。RRT、RRT*和双向RRT。输出时间和路径长度,三种路径规划算法基于matlab在机器人运动规划领域,路径规划算法一直是研究的热点。今天咱们就来深入聊聊三维空间中的RRT(快速扩展随机搜索,Rapidly - exploring Random Tree)路径规划算法家族,包括RRT、RRT*以及双向RRT,并通过Matlab实现它们,同时输出时间和路径长度。
三维RRT路径规划算法。 RRT、RRT*和双向RRT。 输出时间和路径长度,三种路径规划算法基于matlab
在机器人运动规划领域,路径规划算法一直是研究的热点。今天咱们就来深入聊聊三维空间中的RRT(快速扩展随机搜索,Rapidly - exploring Random Tree)路径规划算法家族,包括RRT、RRT*以及双向RRT,并通过Matlab实现它们,同时输出时间和路径长度。
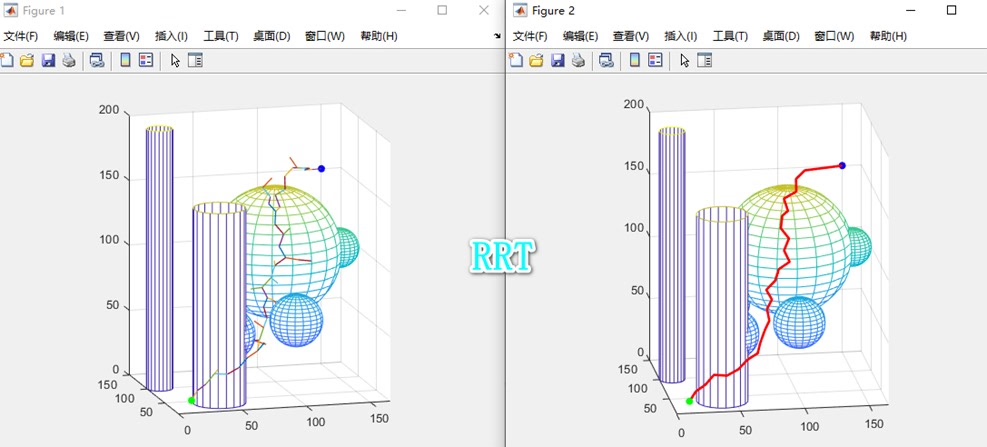
RRT算法基础
RRT算法的核心思想是通过在搜索空间中随机采样点,不断扩展树状结构来寻找从起点到目标点的路径。下面是一段简单的Matlab伪代码示意其基础流程:
% 初始化树,根节点为起点
tree = [start_point];
while ~found_path
% 随机采样一个点
sample = random_sample();
% 找到树中距离采样点最近的节点
nearest = nearest_neighbor(tree, sample);
% 尝试从最近节点向采样点扩展
new_node = extend(nearest, sample);
if collision_free(new_node)
% 将新节点加入树中
tree = [tree; new_node];
if near_goal(new_node)
% 找到了目标点,生成路径
path = generate_path(tree, start_point, goal_point);
found_path = true;
end
end
end代码分析
- 初始化树:从起点开始构建树结构,这是整个搜索的起始点。
- 随机采样:
random_sample()函数在整个搜索空间中随机生成一个点,这使得算法能有效探索不同区域。 - 寻找最近节点:
nearest_neighbor()通过计算距离,在已有树节点中找到距离采样点最近的,这一步引导树向采样点方向扩展。 - 扩展节点:
extend()函数尝试从最近节点向采样点移动一定步长,生成新节点。 - 碰撞检测:
collision_free()判断新节点是否与障碍物碰撞,只有无碰撞时才加入树。 - 目标判断:
near_goal()检查新节点是否接近目标点,若接近则生成路径。
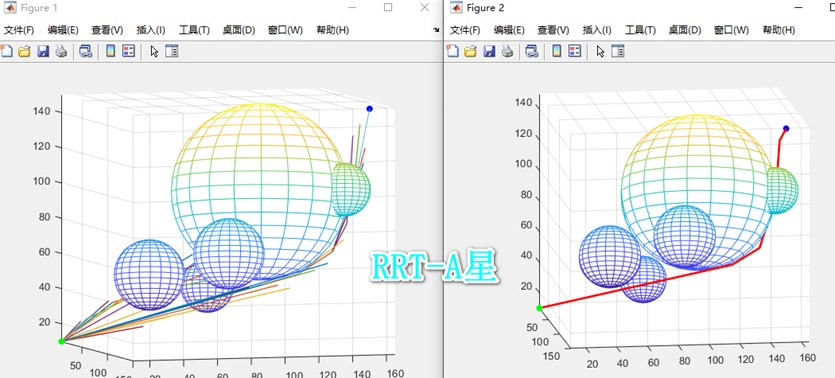
RRT*算法改进
RRT是对RRT的优化,它在扩展树的同时进行重布线(rewiring)操作,使树的结构更优,找到更短路径。以下是RRT相对RRT新增操作的Matlab代码示意:
% 在扩展新节点后
if collision_free(new_node)
tree = [tree; new_node];
% 重布线操作
for i = 1:size(tree, 1)
if collision_free(tree(i, :), new_node) && cost(tree(i, :)) + distance(tree(i, :), new_node) < cost(new_node)
new_parent = i;
new_node = [new_node; new_parent];
% 更新新节点到起点的代价
cost(new_node) = cost(tree(i, :)) + distance(tree(i, :), new_node);
end
end
if near_goal(new_node)
path = generate_path(tree, start_point, goal_point);
found_path = true;
end
end代码分析
- 重布线循环:遍历树中所有节点,检查是否可以通过新节点重新连接,以降低到起点的代价。
- 条件判断:既要保证新连接无碰撞,又要确保新连接路径代价小于当前新节点到起点的代价。
- 更新节点:若满足条件,更新新节点的父节点和代价,优化树结构。
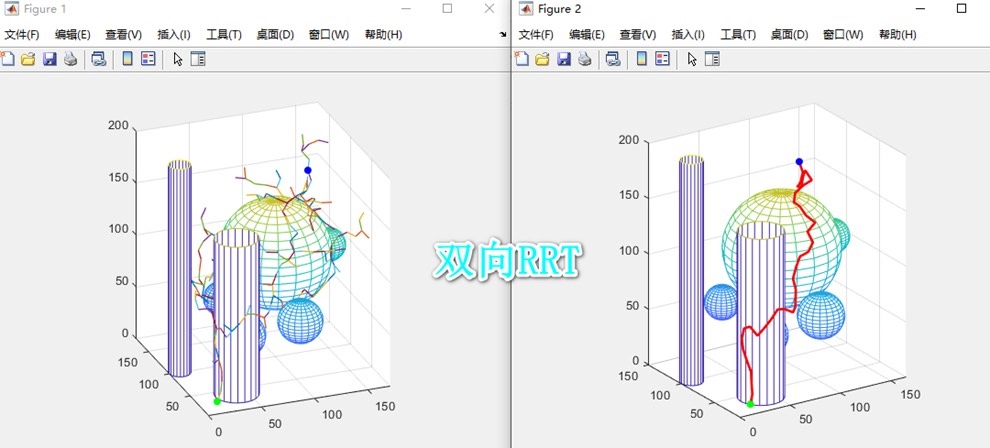
双向RRT算法
双向RRT同时从起点和目标点开始构建两棵树,分别向对方扩展,期望更快相遇。Matlab代码大致如下:
% 初始化两棵树,分别从起点和目标点开始
tree_start = [start_point];
tree_goal = [goal_point];
while ~trees_connected
% 随机采样
sample = random_sample();
% 从起点树扩展
nearest_start = nearest_neighbor(tree_start, sample);
new_node_start = extend(nearest_start, sample);
if collision_free(new_node_start)
tree_start = [tree_start; new_node_start];
% 检查是否与目标树连接
if near_tree(tree_goal, new_node_start)
path = connect_trees(tree_start, tree_goal, new_node_start);
trees_connected = true;
end
end
% 从目标树扩展(类似起点树扩展操作)
nearest_goal = nearest_neighbor(tree_goal, sample);
new_node_goal = extend(nearest_goal, sample);
if collision_free(new_node_goal)
tree_goal = [tree_goal; new_node_goal];
if near_tree(tree_start, new_node_goal)
path = connect_trees(tree_start, tree_goal, new_node_goal);
trees_connected = true;
end
end
end代码分析
- 双树初始化:分别以起点和目标点为根构建两棵树。
- 交替扩展:每次循环从起点树和目标树交替扩展,随机采样点用于引导扩展方向。
- 连接检测:每次扩展新节点后,检查新节点是否接近另一棵树,若接近则连接两棵树生成路径。
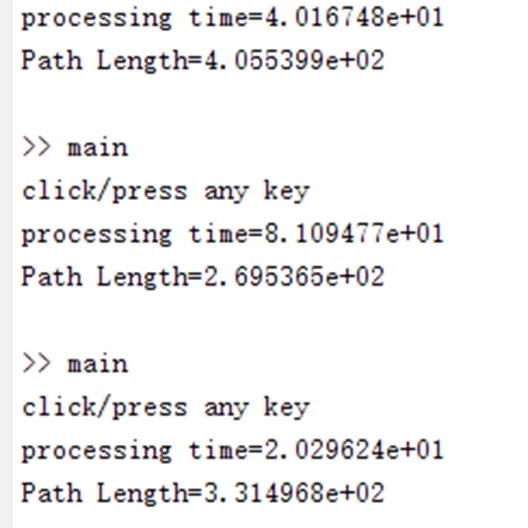
输出时间和路径长度
在Matlab实现中,为了输出每种算法的运行时间和路径长度,可以使用如下代码:
% 记录开始时间
start_time = tic;
% 运行路径规划算法(以RRT为例)
path = rrt(start_point, goal_point, obstacles);
% 记录结束时间
end_time = toc(start_time);
% 计算路径长度
path_length = 0;
for i = 1:length(path)-1
path_length = path_length + distance(path(i, :), path(i + 1, :));
end
fprintf('RRT算法运行时间: %f 秒\n', end_time);
fprintf('RRT算法路径长度: %f\n', path_length);代码分析
- 时间记录:
tic和toc函数分别用于记录算法开始和结束时间,从而得到运行时间。 - 路径长度计算:通过循环累加路径中相邻节点的距离,得到路径总长度。
总结一下,RRT、RRT和双向RRT在三维路径规划中各有特点。RRT简单易实现,RRT能找到更优路径,双向RRT则在搜索效率上有优势。通过Matlab实现并分析它们的运行时间和路径长度,可以根据实际需求选择最合适的算法。希望这篇博文能帮助大家更好地理解和应用三维RRT路径规划算法家族。
三维RRT路径规划算法。 RRT、RRT*和双向RRT。 输出时间和路径长度,三种路径规划算法基于matlab

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐
 8
8 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)