只会基础PLC没用?一文吃透其在智能植树机器人中的进阶工程应用
跨入2026年,中国技术飞速发展为环境带来改变的工具,荒漠水资源如今已经不断优化,那我们要实现可持续就要从根本上改变,去植树育林。而当前国内生态修复、国土绿化、碳中和目标推进,传统人工植树存在作业效率低下、高危地形适配性差、人力成本高、栽植标准化程度不足等痛点,智慧农林装备成为行业升级核心方向。一体化智能植树机器人集成挖坑、扶苗、覆土、定距、辅助灌溉等全流程功能,是农林机械化向智能化、一体化转型的
一、引言
跨入2026年,中国技术飞速发展为环境带来改变的工具,荒漠水资源如今已经不断优化,那我们要实现可持续就要从根本上改变,去植树育林。而当前国内生态修复、国土绿化、碳中和目标推进,传统人工植树存在作业效率低下、高危地形适配性差、人力成本高、栽植标准化程度不足等痛点,智慧农林装备成为行业升级核心方向。一体化智能植树机器人集成挖坑、扶苗、覆土、定距、辅助灌溉等全流程功能,是农林机械化向智能化、一体化转型的典型载体,具备明确的工程落地价值,这一垂直应用场景具备天然的行业关注度与内容稀缺性,是我们锚定细分赛道的基础。未来我们将覆盖从硬件拓扑、程序编程、模块拆分,到现场联调、故障排查、精度优化的全技术链条,引导植树机器人技术形成系统化的技术框架,而非零散知识点堆砌。明确一体化多动作协同机器人的PLC设计规范,完善运动控制、传感交互、逻辑时序编排的工程应用方法,提升同类智能装备控制系统的设计规范性与可靠性。
二、核心系统设计与原理详解
该系统设计主要由两大系统(驱动系统、智能控制系统)和四大机构(挖坑系统、送苗系统、培土机构、浇水机构)组成。如图: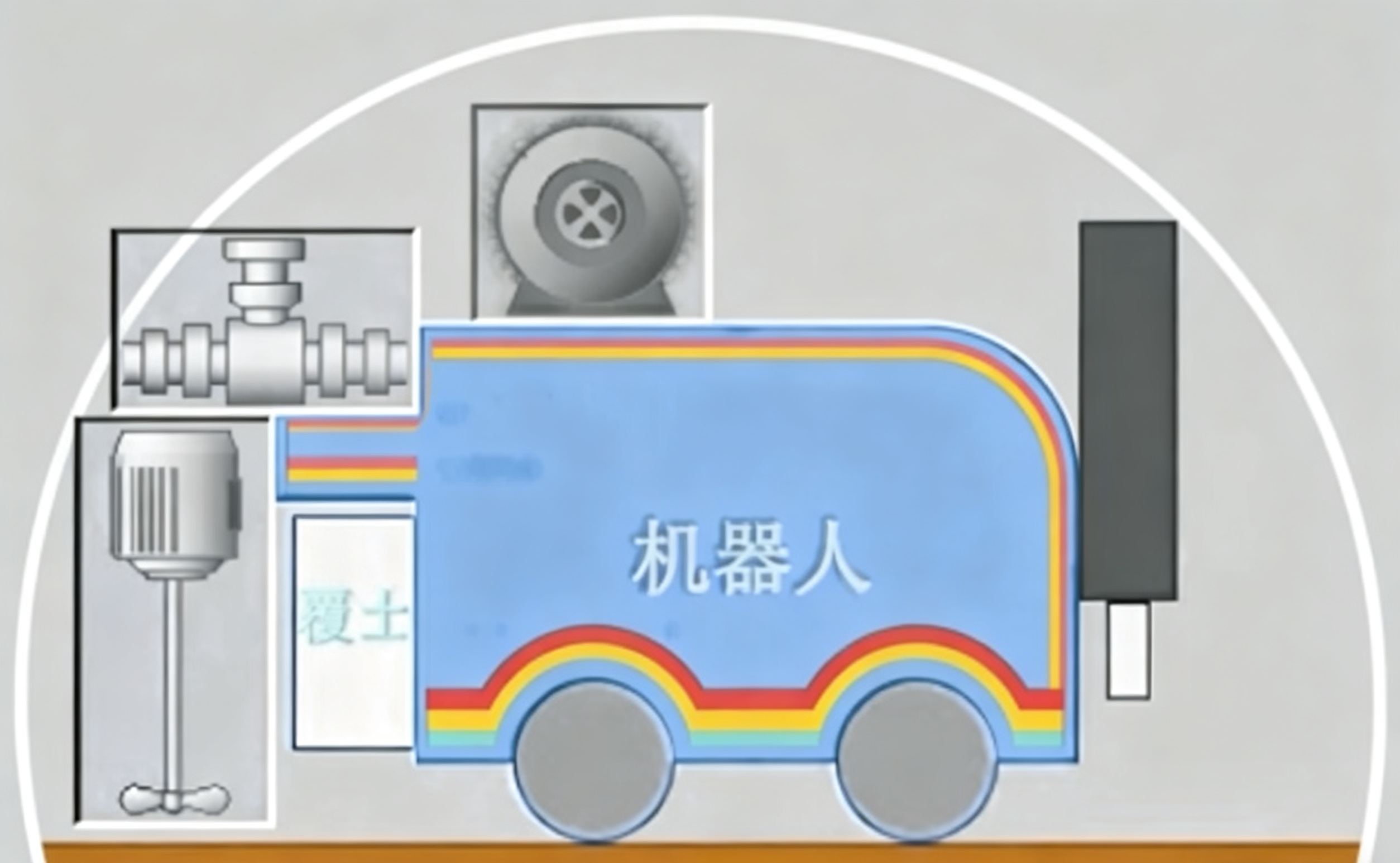
●驱动系统由全数字控制的四轮直流伺服电机组成,负责机器人在作业过程中的行走驱动;挖坑机构采用螺旋式钻头,便于松土和向周围抛洒;送苗机构采用专用创新设计,巧妙地运用外槽轮间歇运动的特点,完成树苗的输送;培土机构连接于送苗筒下部表面处,培土时培土钢片呈倾斜状态,能高效地完成聚拢拍土的动作;浇水机构通过控制水阀开启与关闭,完成浇水作业。
●智能控制系统,该系统综合采用单片机、 PLC 控制技术,负责对小车的行走驱动以及挖坑、送苗、培土、浇水等过程的控制。且该部分安装了蓝牙接收模块,可以用手机 App 实现远程操控、作业参数的动态调整等 。
●挖坑机构,该机构由螺旋钻头、连接杆、永磁无刷直流电动机、升降齿条、齿轮(与齿条啮合)、稳定架等组成。螺旋钻头和直流电机通过连接杆螺栓连接,直流电机与蓄电池连接,把化学能转化为机械能,通过连接杆把机械能传递给螺旋钻头。稳定架和直流电机通过螺栓连接,升降齿条和稳定架焊接在一块。 PLC 控制直流电机的运动来控制钻头的运动,包括控制直流电机的启动、停止和正反向运动,从而控制稳定架和钻头的竖直运动,完成向下挖坑和提升钻头。
●送苗机构,由直流电动机、外槽轮、盛苗器(底部为空)、铰链、导轨、送苗管、小轮、拨动杆等组成。送苗机构由直流电动机提供动力。位于工作台上的盛苗器之间铰链连接,小轮装在盛苗器与导轨的外边缘之间。在送苗过程中,控制系统控制直流电动机转动,从而带动外槽轮转动,外槽轮拨动盛苗器上的拨动杆使盛苗器向前滑动至送苗管的上方,树苗由于重力便会缓慢落入送苗管中,最终完成送苗动作。
●培土机构,该机构主要由培土钢片、连接杆、套圈、送苗管、气动传动杆、气缸和气泵组成。套圈套在送苗管外表面,可以沿送苗管轴向移动。培土片与送苗管铰链连接,同时连接杆铰链连接套圈和培土片。气动传动杆与套圈之间为铰链连接。送苗结束后,控制系统通过控制气动装置中的电磁阀来控制气缸的运转,带动传动杆的运动,然后通过铰链控制套圈、传动杆及培土片的运动。电磁阀可通过控制气缸的正反向运动来实现培土片的上下往复运动,从而完成培土过程中的反复拍土,提高培土质量。
●浇水机构,主要由水箱、水管、开关阀、 PLC 控制模块组成。培土过程结束后, PLC 控制开关阀的关闭进而完成浇水作业。在这个工作过程中,控制系统会根据不同种类树苗所需水量的不同来控制浇水时间,完成差异化作业。
三、PLC控制系统的实现
3.1、I/O地址分配
我将结合S7-1200PLC一体化植树机器人的作业流程(定位、挖穴、放苗、覆土、浇水、故障检测等),遵循功能分组、便于编程调试、预留扩展等原则,完成I/O地址分配,兼顾便捷性、现场调试性与系统可扩展性。
数字量输入(DI)主要采集机器人开关量传感器信号、操作指令信号及限位到位检测信号,有常闭触发模式的急停按钮,还有复位时的行程开关等。如图: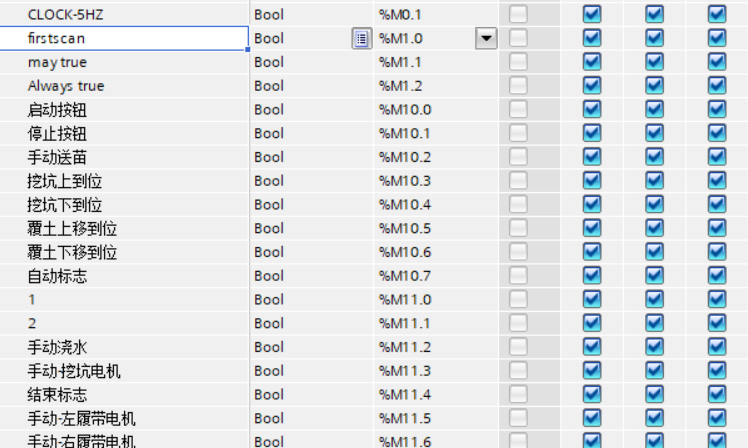
以及启动停止按钮等。如图: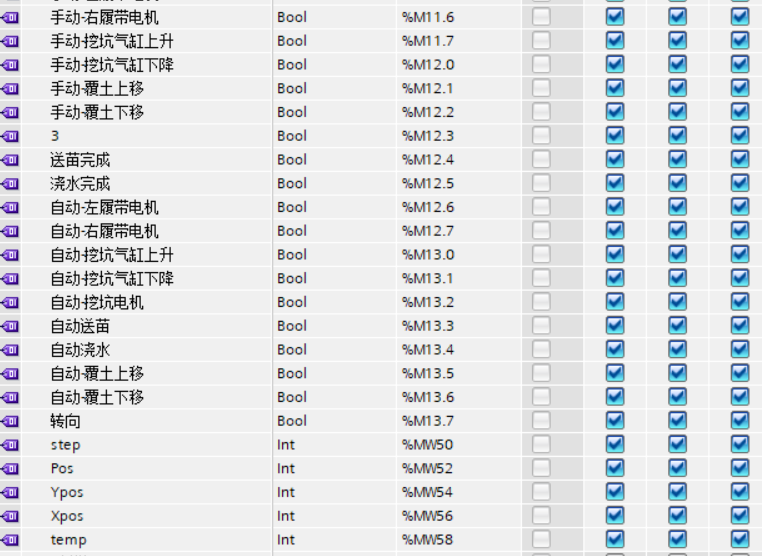
数字量输出(DO)主要控制机器人的执行机构、电磁阀、电机启停、指示灯及报警装置。
整个I/O地址分配遵循功能分组原则,按“定位-挖穴-放苗-覆土-浇水”作业流程将同环节信号地址连续排布,便于编程与故障排查;严格区分数字量与模拟量信号分区,避免干扰,符合S7-1200硬件接线规范;程序中优先扫描,保障作业安全,数字量输出则根据执行机构类型选择继电器或晶体管输出,确保硬件匹配。
3.2、PLC总体框架及梯形图程序段
控制系统采用分层调度+模块化执行架构,梯形图程序按启动初始化、主循环调度、定时中断、功能子程序、故障中断进行划分,各程序段独立封装、通过状态标志与数据块交互,避免逻辑耦合,便于单环节调试与后期功能扩展,整体程序分为四大类:组织块OB(系统调度与中断)、功能FC(动作执行逻辑)、数据块DB(参数与状态存储)、中断块(安全与实时控制),所有动作控制逻辑均以梯形图形式实现,符合现场电气调试人员阅读习惯。
以下程序段主要是从组织块和数据块着手的,组织块作为程序的调度核心,数据快进行数据存储与交互,保证连续性,以实现变量共享与状态传递,保证梯形图逻辑数据交互稳定、地址规范统一。
首先我们对部分电机进行初始化:
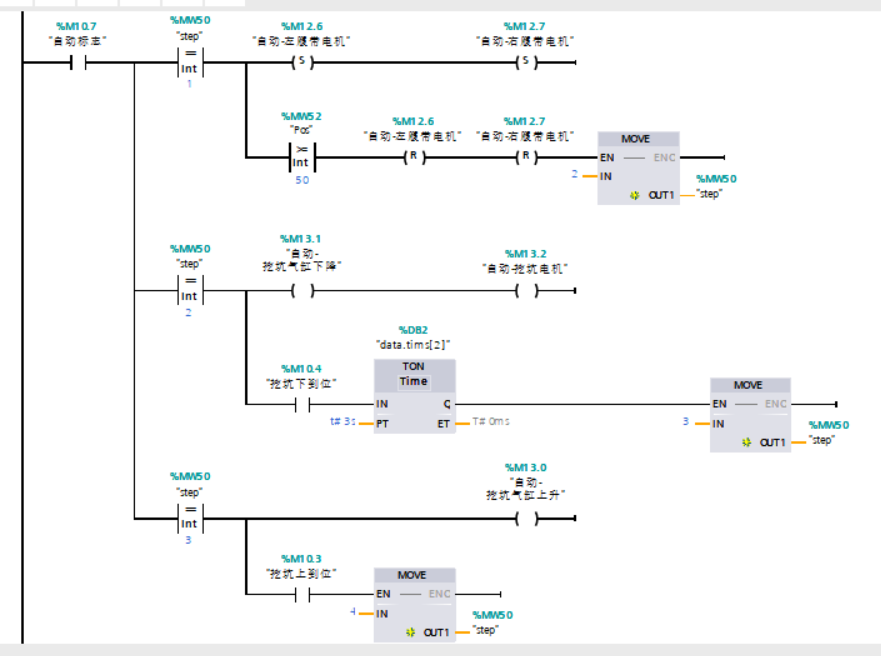
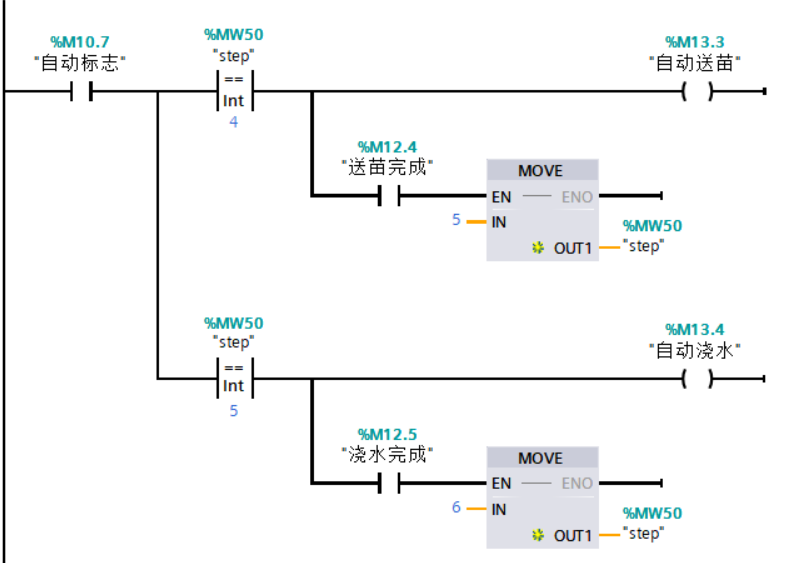
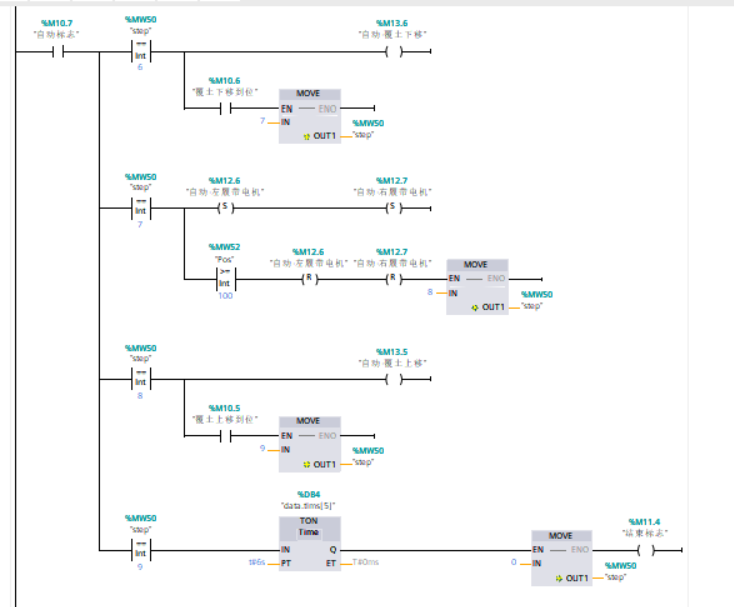
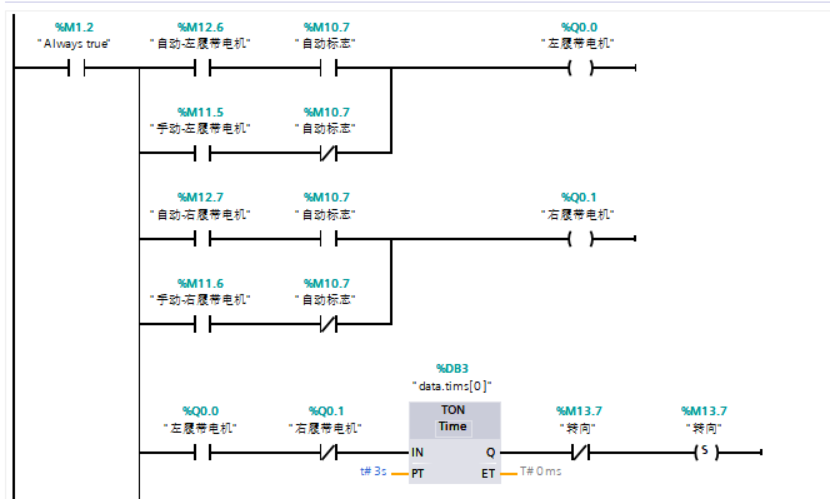
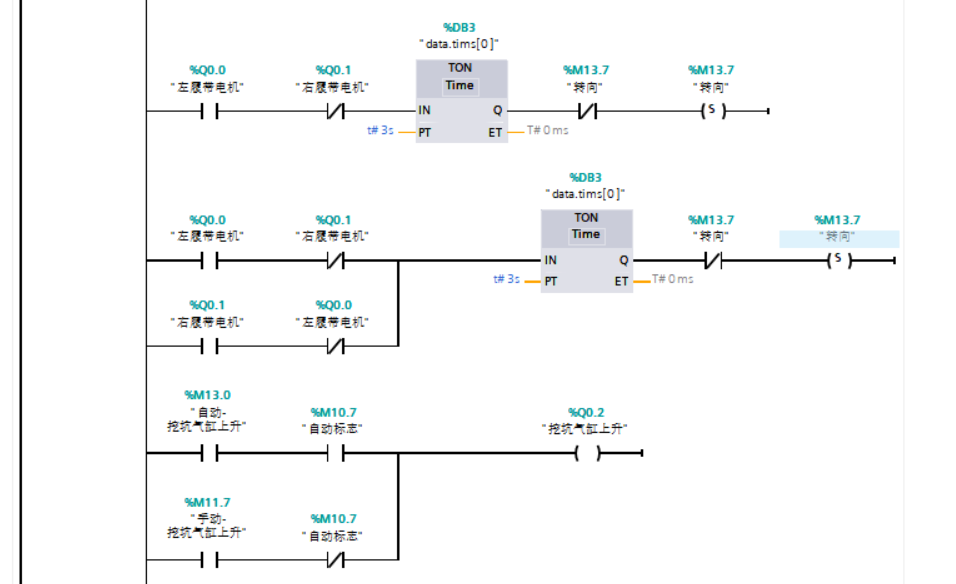
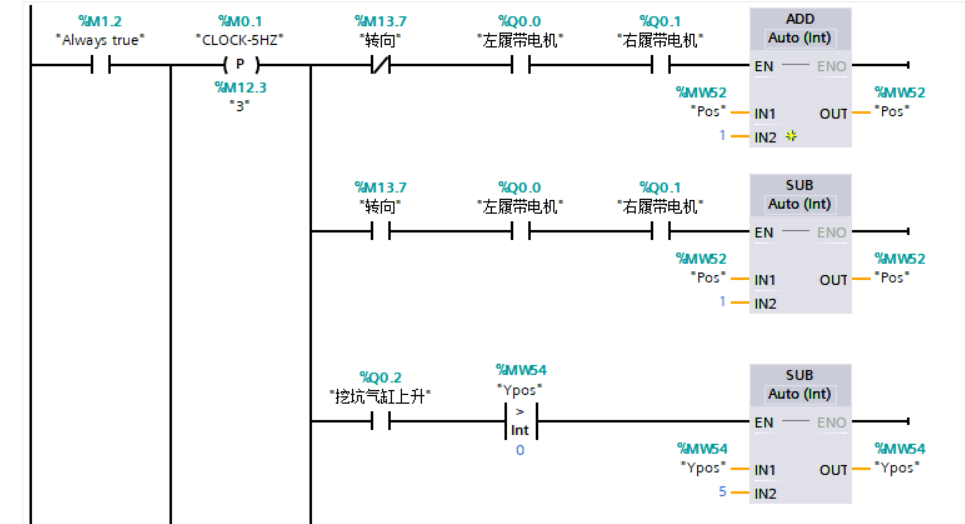
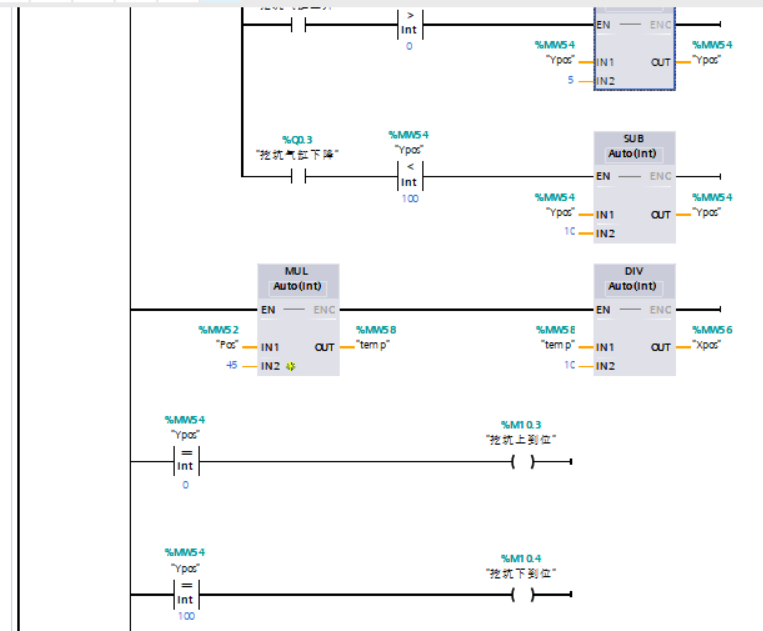
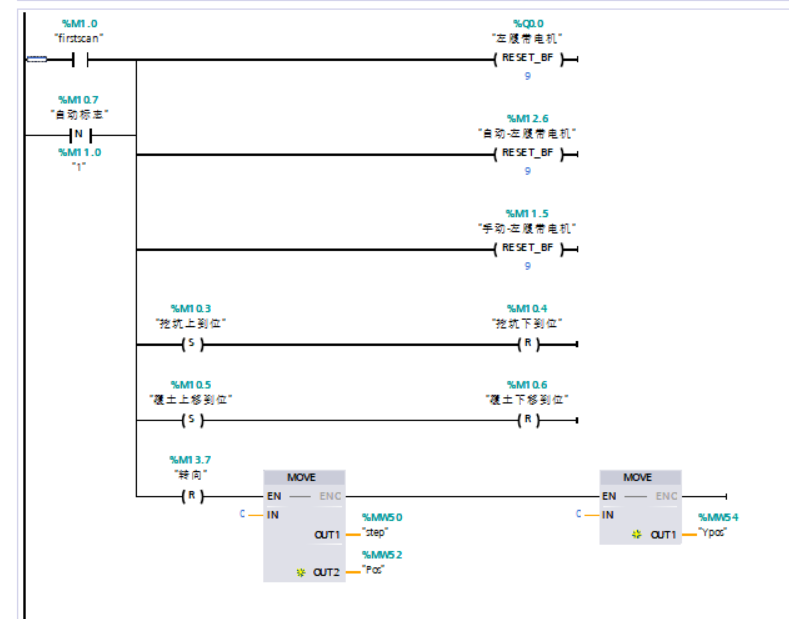 然后我们进行自动的行走、挖坑、 送苗、覆土
然后我们进行自动的行走、挖坑、 送苗、覆土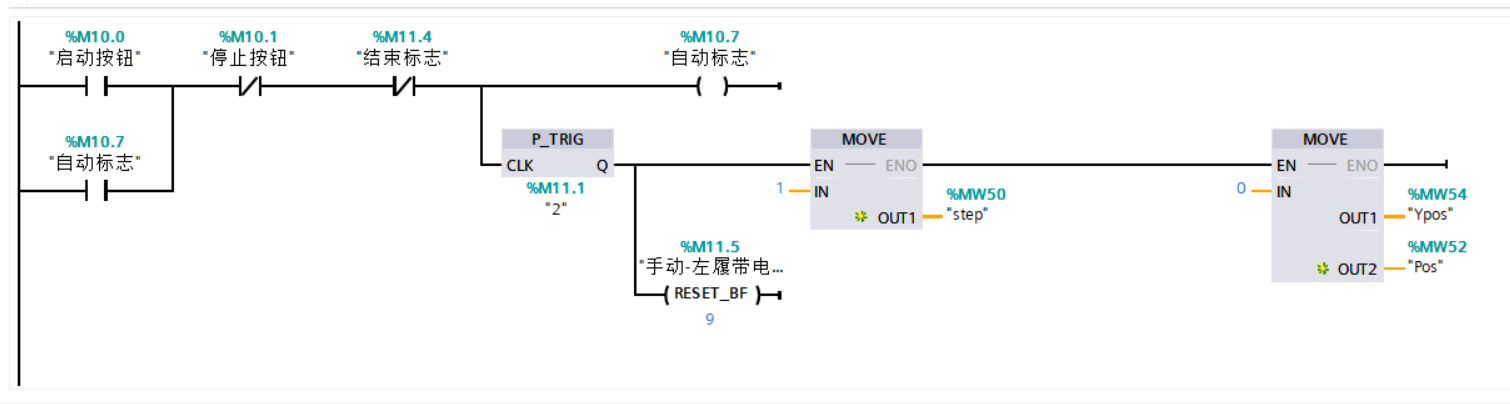
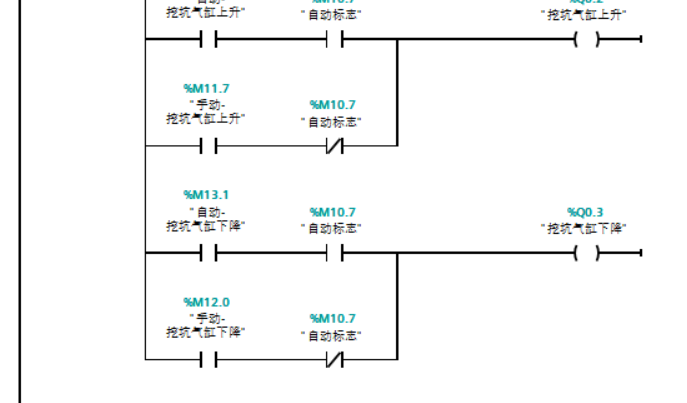
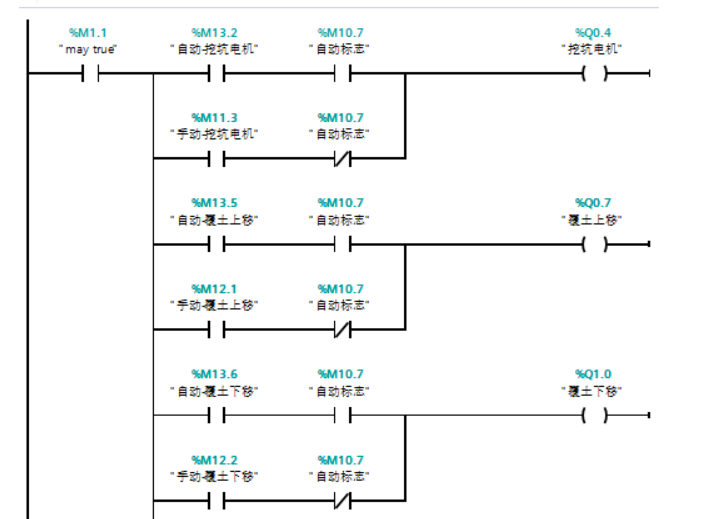
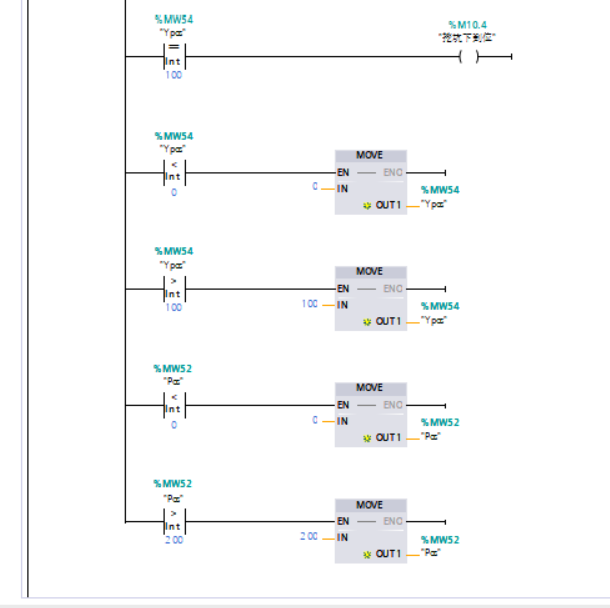
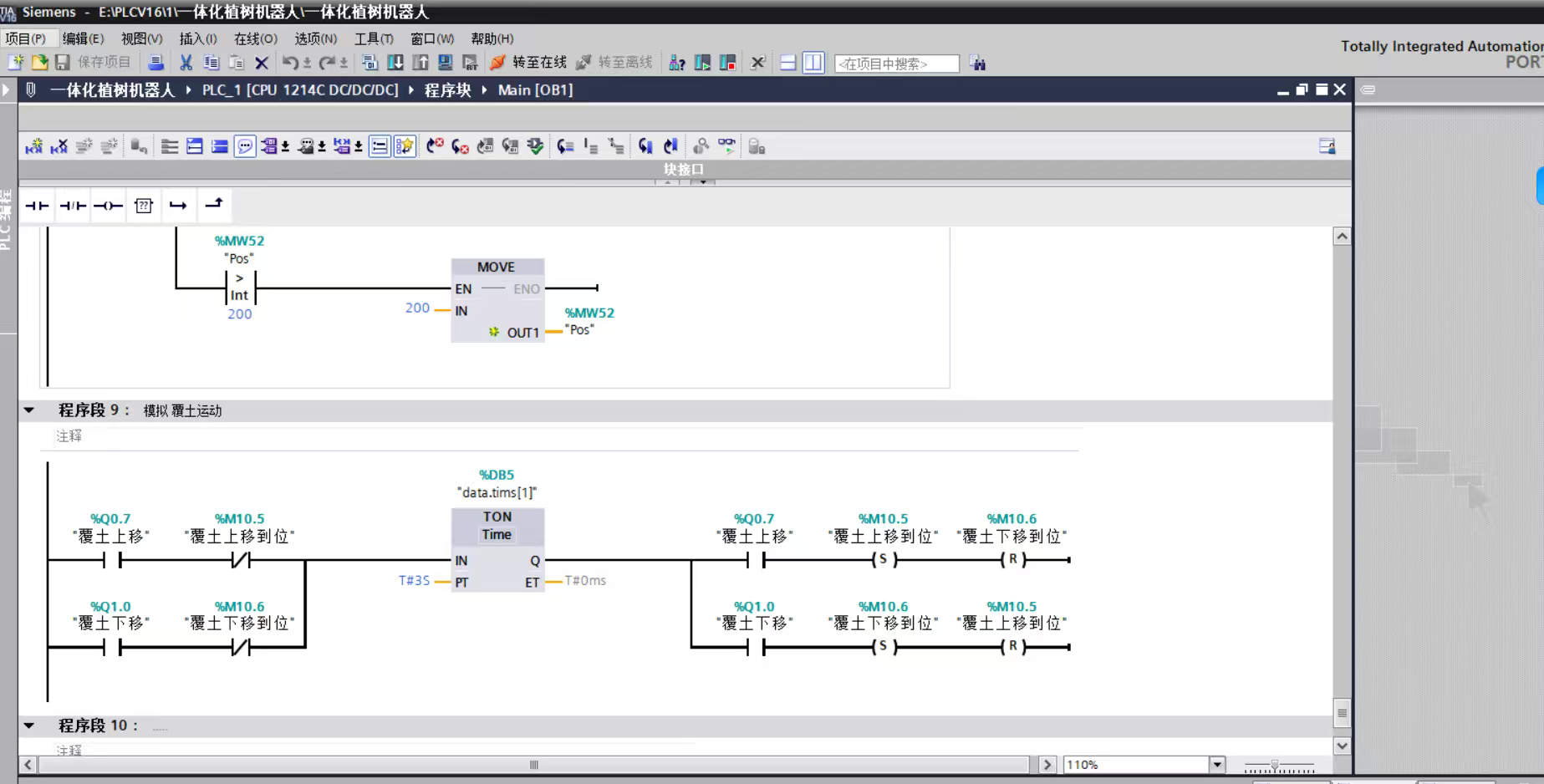
 然后我们进行手自动切换、模拟动画、模拟覆土运动以及安全预警等。
然后我们进行手自动切换、模拟动画、模拟覆土运动以及安全预警等。
四、关键技术挑战与应用场景
在工程化落地与实际作业过程中面临多项核心技术挑战,这些挑战既源于户外非结构化作业环境的复杂性,也与小型PLC的控制特性、多机构协同作业的工艺要求紧密相关。首先是复杂地形下的行走定位与姿态稳定控制难题,植树作业多处于荒山、坡地、沙地等非平整场地,地面起伏、土质松软易导致机器人底盘滑移、姿态偏移,而S7-1200 PLC的主循环扫描周期与定时中断资源有限,需在有限算力内实现定位传感器信号滤波、行走纠偏、姿态补偿的实时闭环控制,同时抵御户外粉尘、泥水、振动对传感器与PLC输入信号的干扰,避免定位偏差引发挖穴错位、栽植歪斜等问题;还有多执行机构的时序协同与机械互锁控制挑战,机器人集成行走、挖穴、取苗、栽植、覆土、压实等多套运动机构,各环节需严格遵循时序逻辑依次动作,任何时序错乱或机构干涉都会导致设备卡滞、苗木损伤甚至机械损坏, PLC需通过精细化梯形图逻辑设计、软硬件双重互锁、中断优先级调度,实现多电机与电磁阀的同步协调控制,同时兼顾动作响应速度与作业平稳性。然后是土壤工况自适应与栽植工艺精准调控难题,不同区域的土壤硬度、含水率、密实度差异极大,挖穴阻力、覆土效果、栽植深度均需动态适配,而 PLC的模拟量处理能力与闭环调节资源有限,需结合简易PID算法、限位与压力传感器反馈,实现挖穴深度、钻具转速、压实力度的自适应调整,保证苗木栽植规格统一、成活率达标。
此外,户外恶劣环境下的系统可靠性与故障自愈挑战也较为突出,野外作业存在温湿度波动、电磁干扰、供电波动等问题, PLC需具备强抗干扰能力与程序容错机制,同时实现故障实时诊断、紧急停机保护、断点续作业功能,解决野外无人值守场景下的设备稳定性与快速复位需求;最后是轻量化集成与低功耗适配挑战,植树机器人多采用车载移动供电, PLC需配合小型化硬件架构,优化程序扫描周期与输出控制逻辑,降低整机功耗,同时兼顾控制精度与设备便携性,适配山地、丘陵等狭小作业空间的部署要求。
五、结论与展望
本设计以西门子S7-1200 PLC为控制核心完成一体化植树机器人控制系统的整体搭建与程序开发,通过模块化梯形图程序段分配、分层式逻辑架构设计及全流程安全联锁控制,实现了机器人行走定位、自动挖穴、苗木输送、栽植覆土、压实归位的全流程自动化作业,充分验证了小型PLC在林业智能装备控制领域的适用性与可靠性。
面向林业智能化与生态工程建设的发展趋势,基于S7-1200 PLC的一体化植树机器人系统仍具备广阔的优化空间与应用拓展前景,未来可从控制技术、硬件升级、功能集成、场景适配等维度持续迭代升级。在控制层面,可结合北斗高精度定位、机器视觉识别、土壤参数传感器等设备,优化PLC控制算法,引入自适应调节与模糊控制逻辑,进一步提升机器人在陡坡、乱石、软基等复杂地形的行走稳定性与栽植精准度,同时依托工业物联网实现PLC与云端平台的数据交互,完成作业数据采集、远程监控、故障预警与程序远程更新;在硬件与架构层面,可逐步向S7-1500等中高端PLC过渡,搭配运动控制模块与伺服驱动系统,提升多机构协同的动态响应速度与定位精度,同时推进机器人轻量化、低功耗、模块化设计,适配山地、林区、荒漠等更多严苛作业场景;在功能与应用层面,可集成苗木存活监测、智能补植、林地巡检等拓展功能,实现植树、养护一体化作业,还可构建多机器人协同作业调度系统,满足大面积生态修复工程的规模化作业需求。随着林业机械化、智能化政策的持续推进与核心技术的不断成熟,基于PLC控制的智能植树机器人将逐步实现产业化推广,广泛应用于荒山造林、矿区复绿、沿海防护、城市绿化等多元场景,大幅降低人工造林成本与劳动强度,推动生态修复工程向高效化、标准化、智能化方向高质量发展。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐

 15
15 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)