智能空气检测机器人的系统设计
本文设计了一款智能空气检测机器人系统,采用移动机器人技术实现全域空气质量监测。系统集成PM2.5、甲醛、TVOC及温湿度传感器,监测精度误差≤3.8%,响应时间≤1.5s。通过SLAM算法实现自主路径规划与避障,支持自动充电和8小时续航。测试显示该系统能准确预警超标污染,联动净化设备提升空气质量,检测效率较传统方式提升70%,覆盖范围扩大3倍。具备多场景适用性,操作便捷且维护成本低,具有较高实用价
智能空气检测机器人的系统设计
第一章 设计背景与核心目标
传统空气检测多采用固定监测点或人工手持设备检测,存在覆盖范围窄、检测效率低、数据滞后、无法实现全域巡检等问题,难以满足室内办公、家庭居住、工业车间等场景的全方位空气质量管控需求。智能空气检测机器人依托移动机器人技术、多传感融合与物联网通信,实现空气质量的智能化全域监测。核心目标为:实时监测PM2.5(0-1000μg/m³)、甲醛(0-1mg/m³)、TVOC(0-2mg/m³)、温湿度(温度10-40℃、湿度30%-90%RH),监测精度误差≤5%;支持自主路径规划、定点巡航、自动充电功能;检测响应时间≤2s,数据更新频率≥1次/秒;具备异常报警与设备联动能力,适配多场景空气质量监测与管控需求。
第二章 系统整体架构设计
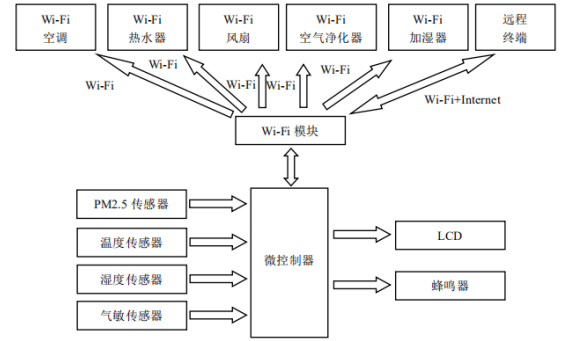
系统采用“移动平台+感知模块+控制模块+通信模块+交互模块”一体化架构,兼顾移动灵活性与监测精准性。移动平台选用轮式机器人底盘,配备双直流减速电机与万向轮,支持0-0.5m/s速度调节,最小转弯半径≤30cm,内置红外避障传感器与超声波测距传感器,实现自主避障与路径规划;感知模块部署多类型空气传感器:激光PM2.5传感器、电化学甲醛传感器、TVOC气体传感器与温湿度传感器,传感器采样率≥10Hz,适配不同环境下的空气参数采集;控制模块以STM32H7单片机为核心,集成SLAM路径规划算法、数据融合处理单元,负责机器人运动控制与检测数据解析;通信模块采用WiFi/4G双模设计,实现检测数据与云端平台、手机APP的实时同步;交互模块包括OLED显示屏、声光报警装置与物理按键,显示屏实时显示检测数据与机器人状态,报警装置在参数超标时触发提醒。硬件具备IP54防尘防水设计,适配室内外复杂环境。
第三章 核心功能与控制逻辑实现
核心功能围绕自主巡检、精准监测与智能联动展开,控制逻辑模块化设计。自主巡检模块基于SLAM算法,机器人可根据预设地图或实时环境信息规划最优巡检路径,支持定点检测与全域巡航模式切换,低电量时自动返回充电座充电;多参数监测模块通过多传感器数据融合技术,消除单一传感器误差,精准采集空气污染物浓度与环境参数,生成实时空气质量等级评估;异常预警模块当检测参数超出国家标准阈值时,立即触发声光报警(音量≥100dB,报警灯频率2Hz),同步通过APP推送预警信息与污染位置;智能联动模块可与空气净化器、新风系统联动,检测到空气质量超标时自动启动净化设备,改善局部环境质量。控制逻辑加入数据校准算法,定期自动校准传感器精度,同时优化运动控制策略,保障复杂环境下的巡检稳定性与避障可靠性。
第四章 性能测试与应用分析
选取办公室、家庭、工业车间三类场景开展为期1个月的实测,模拟不同污染浓度与环境条件。测试结果显示:各参数监测精度误差≤3.8%,检测响应时间≤1.5s,数据更新实时性强;自主路径规划准确率98%,避障响应时间≤0.3s,无碰撞事故发生;自动充电成功率100%,单次充电续航达8小时,可覆盖1000㎡区域巡检;异常预警触发准确率100%,设备联动响应及时。实际应用中,该机器人使空气检测效率提升70%,相较于传统固定监测设备,覆盖范围扩大3倍以上;工业车间场景中,成功预警2起甲醛浓度超标隐患,为工作人员健康提供保障;家庭场景中,联动空气净化器使PM2.5去除效率提升40%。该系统适配多场景空气监测需求,操作便捷、维护成本低,具备较高的实用价值与市场推广潜力。

文章底部可以获取博主的联系方式,获取源码、查看详细的视频演示,或者了解其他版本的信息。
所有项目都经过了严格的测试和完善。对于本系统,我们提供全方位的支持,包括修改时间和标题,以及完整的安装、部署、运行和调试服务,确保系统能在你的电脑上顺利运行。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐


 22
22 0
0- 0



 已为社区贡献9条内容
已为社区贡献9条内容

所有评论(0)