基于麻雀搜索算法(SSA)的三维旅行商问题,三维TSP问题。 如果觉得蚁群算法太老了
本系统旨在解决三维旅行商问题(3D TSP),通过引入麻雀搜索算法(SSA)这一智能优化算法,实现对多城市三维空间路径的高效规划。与传统二维TSP问题不同,三维场景下城市坐标新增了高度维度,路径距离计算需考虑三维空间欧氏距离,问题复杂度显著提升。系统通过模拟麻雀种群的觅食、预警等行为机制,在海量可能的路径组合中快速搜索最优解,最终输出最短旅行路径及对应的路径长度,并提供可视化展示功能,为物流配送、
基于麻雀搜索算法(SSA)的三维旅行商问题,三维TSP问题。 如果觉得蚁群算法太老了,那么麻雀算法解决三维TSP问题就相对新颖一些了。 标记出城市坐标的三维节点,起始点。 如果您改进出麻雀算法,但缺少工程应用,3维TSP未尝不是一个好选择。
一、系统概述
本系统旨在解决三维旅行商问题(3D TSP),通过引入麻雀搜索算法(SSA)这一智能优化算法,实现对多城市三维空间路径的高效规划。与传统二维TSP问题不同,三维场景下城市坐标新增了高度维度,路径距离计算需考虑三维空间欧氏距离,问题复杂度显著提升。系统通过模拟麻雀种群的觅食、预警等行为机制,在海量可能的路径组合中快速搜索最优解,最终输出最短旅行路径及对应的路径长度,并提供可视化展示功能,为物流配送、无人机航线规划、机器人巡检等领域的路径优化需求提供技术支撑。
二、核心功能模块
(一)环境初始化与数据预处理模块
- 环境清理:系统启动时自动执行环境变量重置操作,清除MATLAB工作空间中残留的变量、缓存数据及命令行历史记录,避免历史数据对当前计算过程产生干扰,确保每次运行均基于干净的环境,提升计算结果的准确性与稳定性。
- 城市数据导入:支持导入自定义的三维城市坐标数据集,数据格式为矩阵结构,每行代表一个城市,包含横坐标、纵坐标、高度三个维度的数值信息。系统内置30个城市的三维坐标样本数据,用户可直接使用或替换为实际应用场景中的城市坐标数据,满足不同场景下的求解需求。
- 距离矩阵构建:根据导入的城市三维坐标,自动计算任意两个城市之间的三维欧氏距离,并构建距离矩阵。距离计算过程中,通过向量运算优化双重循环逻辑,减少冗余计算,提升矩阵构建效率。距离矩阵作为后续路径长度计算的核心数据基础,为适应度函数求值提供关键支撑。
(二)麻雀算法参数配置模块
- 核心参数定义:提供灵活的参数配置接口,支持用户根据问题规模与求解需求调整关键算法参数,主要包括:
- 预警阈值(ST):控制麻雀种群的预警行为触发条件,默认值设为0.8,用户可根据收敛速度需求微调,阈值越低,种群触发预警并调整位置的概率越高。
- 种群规模(m):定义参与搜索的麻雀个体数量,默认配置50个个体,平衡搜索多样性与计算效率,规模过大会增加计算开销,过小则可能导致搜索陷入局部最优。
- 迭代次数(genmax):设置算法的最大搜索迭代周期,默认1000次迭代,确保算法有充足的时间遍历解空间,同时避免过度迭代造成的资源浪费。
- 捕食者比例(PDpercent)与预警者比例(SDpercent):分别定义种群中负责主动探索新路径的捕食者数量占比、负责监测环境并规避风险的预警者数量占比,默认均设为0.2,模拟自然种群的生态分工,优化搜索策略。 - 参数合法性校验:在参数配置完成后,系统自动对参数取值进行合法性检查,例如种群规模需为正整数、比例参数需在0-1区间内、迭代次数需大于0等,若检测到非法参数,将及时提示用户修正,保障算法后续稳定运行。
(三)种群初始化与适应度计算模块
- 随机种群生成:采用随机排列算法,为每个麻雀个体生成一个唯一的城市访问序列,确保初始种群覆盖解空间的不同区域,避免初始解过于集中导致搜索范围受限。每个个体的序列长度与城市数量一致,且每个城市在序列中仅出现一次,符合TSP问题“每个城市仅访问一次”的约束条件。
- 适应度函数计算:以路径总长度作为适应度评价指标,对于每个麻雀个体对应的城市访问序列,通过遍历序列并查询距离矩阵,累加相邻城市间的距离,同时加上最后一个城市返回起始城市的距离(满足TSP问题“回到起点”的闭环要求),得到该个体的适应度值。适应度值越小,代表对应的路径越优,为后续种群进化提供评价依据。
(四)麻雀种群进化模块
- 捕食者位置更新:根据预警阈值判断当前环境是否存在风险,若环境安全(随机数小于预警阈值),则仅对部分捕食者个体进行小范围位置调整;若环境存在风险(随机数大于等于预警阈值),则扩大捕食者位置调整范围,模拟捕食者在不同环境下的觅食策略。位置调整通过局部城市序列交换实现,确保调整后的序列仍满足TSP问题约束。
- 跟随者位置更新:跟随者根据自身在种群中的排名采取不同策略,排名靠前(前50%)的跟随者参考当前最优个体的路径进行微调,通过学习最优解提升自身适应度;排名靠后的跟随者则随机生成新的路径,模拟自然种群中弱势个体“自寻食物”的行为,避免种群陷入局部最优。
- 预警者位置更新:随机从种群中选取预警者,若预警者的适应度值较差(路径较长),则向当前最优个体的路径靠拢,优化自身路径;若预警者已处于较优位置,则进行小范围随机调整,保持种群的多样性,增强算法的全局搜索能力。
- 种群迭代优化:每次进化后,比较个体更新前后的适应度值,保留更优的个体与对应的路径,实现种群整体适应度的逐步提升。重复迭代过程直至达到最大迭代次数,确保算法充分搜索解空间,逼近全局最优解。
(五)结果输出与可视化模块
- 最优结果计算:迭代结束后,从最终种群中筛选出适应度值最小的个体,对应的城市访问序列即为最短旅行路径,适应度值即为最短路径长度。同时,记录迭代过程中每一代的最优适应度值,形成收敛曲线,直观反映算法的搜索效率与收敛速度。
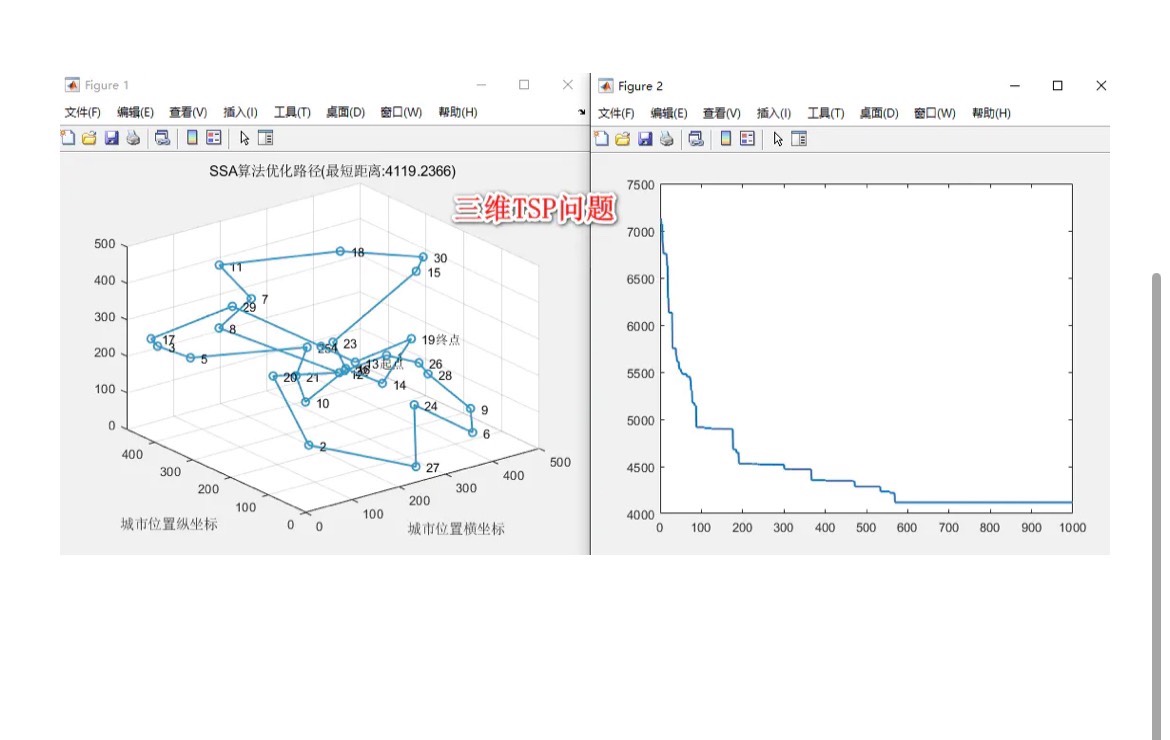
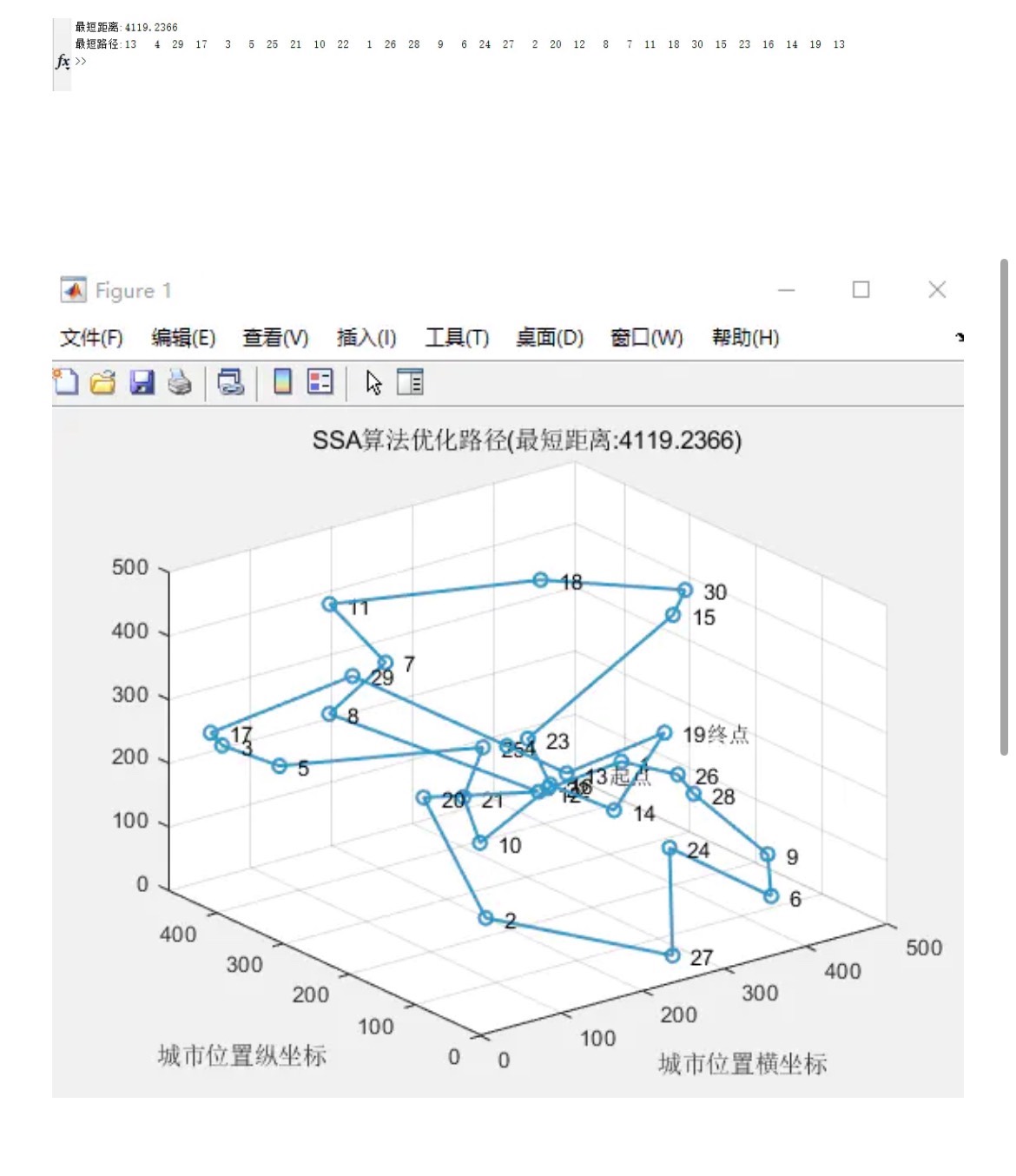
- 三维路径可视化:通过MATLAB的3D绘图功能,绘制最短路径的三维空间曲线,以不同颜色标记城市节点与路径线条,并在每个城市节点旁标注城市编号,同时明确标记路径的起点与终点,方便用户直观查看路径的空间分布的情况。
- 收敛曲线可视化:绘制算法迭代过程中的适应度值收敛曲线,横坐标为迭代次数,纵坐标为每一代的最优路径长度。通过曲线趋势可清晰观察算法的收敛过程,判断算法是否稳定收敛及是否存在早熟收敛现象,为算法参数优化提供参考。
- 结果数据输出:在命令行窗口输出最短路径长度与完整的最短路径(包含起点到终点再返回起点的闭环序列),同时支持将结果数据导出为文本文件,便于后续数据分析与应用场景中的路径调用。
三、系统特点与优势
- 高效的全局搜索能力:基于麻雀搜索算法的种群分工与进化机制,系统能够在庞大的解空间中快速遍历不同路径组合,有效平衡全局搜索与局部搜索,降低陷入局部最优的概率,提升找到全局最优解的可能性。
- 良好的适应性与灵活性:支持自定义城市数量、坐标数据及算法参数,可根据不同应用场景(如城市数量多少、路径精度要求)调整配置,满足多样化的三维TSP问题求解需求。
- 直观的结果展示:通过三维路径图与收敛曲线的可视化展示,用户能够快速理解最优路径的空间结构与算法的优化过程,无需专业的算法知识即可直观获取核心信息。
- 稳定的计算性能:系统通过环境清理、参数校验、迭代优化等机制,确保计算过程的稳定性与结果的可靠性,在不同硬件环境下均能保持一致的计算精度与效率。
四、应用场景
本系统可广泛应用于需要三维空间路径优化的领域,例如:
- 无人机物流配送:在城市高楼林立的三维环境中,规划无人机的最短配送路径,减少飞行时间与能耗,提升配送效率。
- 机器人巡检:在大型工厂、仓库等三维空间场景中,规划巡检机器人的最优巡检路径,确保覆盖所有巡检点的同时,缩短巡检周期。
- 地理信息系统(GIS):在三维地形环境中(如山区、丘陵),规划车辆、人员的最短旅行或运输路径,为交通规划、户外探险等提供决策支持。
- 航空航天领域:在卫星轨道规划、航天器巡检等场景中,计算航天器在三维空间中访问多个目标点的最优路径,优化燃料消耗与任务执行时间。
基于麻雀搜索算法(SSA)的三维旅行商问题,三维TSP问题。 如果觉得蚁群算法太老了,那么麻雀算法解决三维TSP问题就相对新颖一些了。 标记出城市坐标的三维节点,起始点。 如果您改进出麻雀算法,但缺少工程应用,3维TSP未尝不是一个好选择。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐


 18
18 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)