西门子1200码垛机与立体库码垛机程序那些事儿
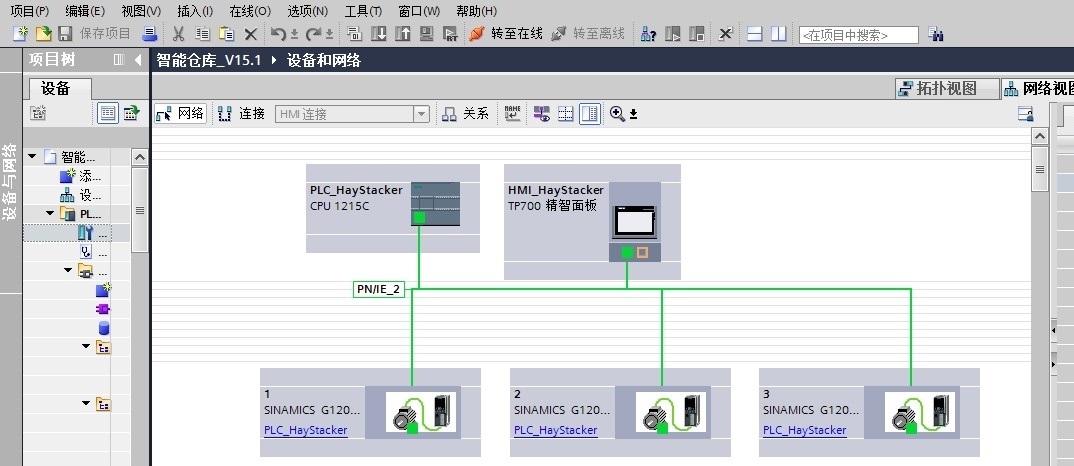
西门子1200码垛机程序和1200立体库码垛机带注释 ,程序结构清楚明了,注释齐全。程序 涉及到变频器,触摸屏,工业机器人,视觉相机的程序控制.modbus tcp通讯,SCL编程,支持博图15.1及以上版本。在自动化生产领域,西门子1200系列PLC以其高性价比和强大功能,在码垛机以及立体库码垛机控制中扮演着关键角色。今天咱就唠唠涉及变频器、触摸屏、工业机器人、视觉相机控制,还包含Modbus
西门子1200码垛机程序和1200立体库码垛机带注释 ,程序结构清楚明了,注释齐全。 程序 涉及到变频器,触摸屏,工业机器人,视觉相机的程序控制.modbus tcp通讯,SCL编程,支持博图15.1及以上版本。
在自动化生产领域,西门子1200系列PLC以其高性价比和强大功能,在码垛机以及立体库码垛机控制中扮演着关键角色。今天咱就唠唠涉及变频器、触摸屏、工业机器人、视觉相机控制,还包含Modbus TCP通讯,采用SCL编程的1200码垛机程序,这程序支持博图15.1及以上版本哦。
整体程序结构与思路
整个程序结构得清晰明了,就像盖房子,先得有个好框架。咱从设备初始化开始,然后到各个设备的联动控制,最后是状态监控与故障处理。
设备初始化
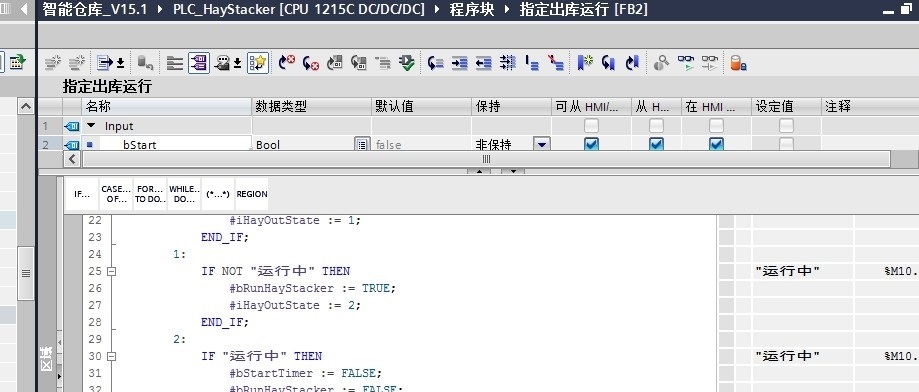
在SCL编程里,初始化部分至关重要。咱得让各个设备“站好队”,准备开始工作。比如对于变频器,得设置好它的运行参数,像频率范围、启动方式啥的。
// 变频器参数初始化
FB_变频器初始化(
In1 := TRUE, // 启动初始化信号
In2 := 50.0, // 最大频率设置为50Hz
In3 := 5.0, // 最小频率设置为5Hz
In4 := 1000, // 加速时间1000ms
In5 := 1000); // 减速时间1000ms这段代码调用了一个自定义功能块 FB_变频器初始化,传入了启动信号以及变频器的关键运行参数。这样变频器就能按照咱们设定的规则开始工作啦。
Modbus TCP通讯
Modbus TCP可是设备间通讯的“桥梁”,通过它,PLC能和其他支持该协议的设备畅快交流。
// Modbus TCP客户端初始化
MB_CLIENT(
REQ := rising_edge_modbus, // 上升沿触发请求
CONNECT := #modbus_connection, // 连接参数
DATA_PTR := P#DB1.DBX0.0 BYTE 100, // 数据指针,指向DB1中一段100字节的数据区
LEN := 100, // 数据长度100字节
DONE => modbus_done, // 完成标志
ERROR => modbus_error); // 错误标志这里使用 MBCLIENT 指令,当 risingedgemodbus 信号上升沿到来时,触发与指定连接 #modbusconnection 的通讯请求,数据收发都围绕 DATA_PTR 指向的100字节数据区,通讯完成或出错会有相应标志。
各设备控制
触摸屏交互
触摸屏是操作人员和码垛机交流的窗口。咱可以在触摸屏上设置各种参数,比如码垛的层数、列数,查看设备运行状态等。在PLC程序里,得处理好触摸屏传来的数据。
// 读取触摸屏设置的码垛层数
#stack_layer := HMI_read_layer;
// HMI_read_layer是从触摸屏读取到的层数数据简单几行代码,就把触摸屏设置的码垛层数读取到PLC变量 #stack_layer 里,后续码垛动作就按这个参数来啦。
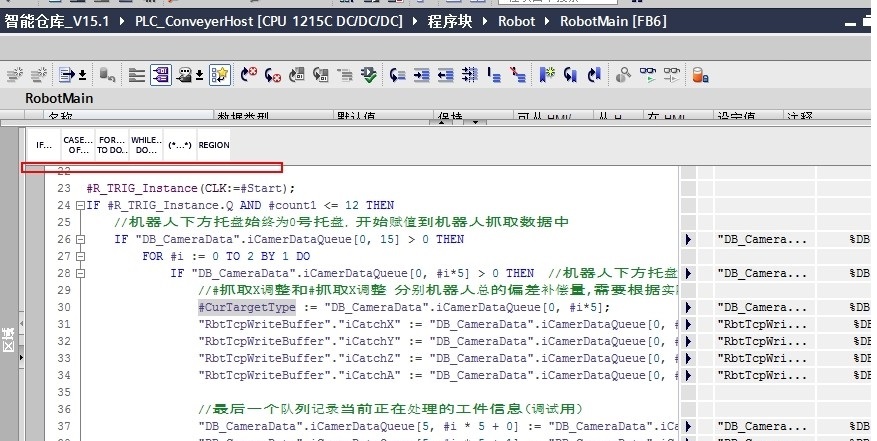
工业机器人与视觉相机协同
工业机器人和视觉相机的配合堪称精妙。视觉相机先识别物料位置,然后把坐标数据传给PLC,PLC再指挥机器人去抓取。
// 假设视觉相机将坐标数据存于DB块中
#x := DB_Vision.DBX0.0;
#y := DB_Vision.DBX4.0;
#z := DB_Vision.DBX8.0;
// 控制工业机器人运动到目标位置
FB_RobotMove(
X := #x,
Y := #y,
Z := #z,
Speed := 100, // 运动速度
Acc := 50); // 加速度从视觉相机对应DB块中取出坐标数据,然后调用 FB_RobotMove 功能块控制机器人移动到目标位置,速度和加速度也都能按需设置。
状态监控与故障处理
实时监控设备状态能及时发现问题,避免故障扩大。一旦有故障,程序得快速响应。
// 监控变频器运行状态
IF #inverter_status <> 1 THEN
// 变频器状态异常
#fault_flag := TRUE;
#fault_code := 101; // 假设101为变频器故障代码
END_IF;
// 处理故障
IF #fault_flag THEN
// 停止所有设备运行
FB_StopAllDevices();
// 向触摸屏发送故障信息
HMI_SendFaultMessage(#fault_code);
END_IF; 通过判断变频器状态标志 #inverter_status,若状态异常就设置故障标志,记录故障代码。一旦故障标志触发,先停止所有设备,再给触摸屏发送故障信息,方便操作人员及时处理。
西门子1200码垛机程序和1200立体库码垛机带注释 ,程序结构清楚明了,注释齐全。 程序 涉及到变频器,触摸屏,工业机器人,视觉相机的程序控制.modbus tcp通讯,SCL编程,支持博图15.1及以上版本。
总之,这套西门子1200码垛机及立体库码垛机程序,通过清晰的结构、完善的设备控制以及可靠的状态监控与故障处理,能有效保障码垛工作高效稳定运行。无论是变频器精准调速,还是各设备间通过Modbus TCP的默契通讯,都在为自动化生产添砖加瓦。



DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐


 4
4 0
0- 0



 已为社区贡献21条内容
已为社区贡献21条内容

所有评论(0)