一份EtherCAT主站的FPGA Verilog代码 ethercat 主站 FPGA ve...
这是一个完整的EtherCAT 主站系统,基于 FPGA 实现,支持最多 32 个伺服轴的实时同步控制。系统通过 EtherCAT 协议与从站(伺服驱动器)通信,实现高性能的多轴运动控制,适用于工业自动化、机器人、CNC 等场景。初始化阶段- FPGA 上电后,ARM 配置伺服参数(如 SM 地址、周期时间)。- 通过 SDO 配置伺服参数(如模式、增益等)。- 伺服依次进入PreOp→SafeO
一份EtherCAT主站的FPGA Verilog代码 ethercat 主站 FPGA verilog 代码 使用FPGA逻辑实现EtherCAT协议,实现主站DC功能。更加突出了EtherCAT现场总线的同步性能及高效性 基于FPGA的EtherCAT主站设计研究 基于FPGA的EtherCAT主站方案 基于FPGA的EtherCAT主站研究 一种基于FPGA实现的EtherCAT主站运动控制器的制作方法 基于FPGA的EtherCAT主站实现与高性能运动控制 基于FPGA的高性能硬件EtherCAT主站研究
一个 EtherCAT 主站(EtherCAT Master)的 FPGA 硬件逻辑,用于控制多个伺服驱动器(servo drives)的同步运动控制。以下是修正后的详细功能说明:
🧠 **系统总体功能概述**
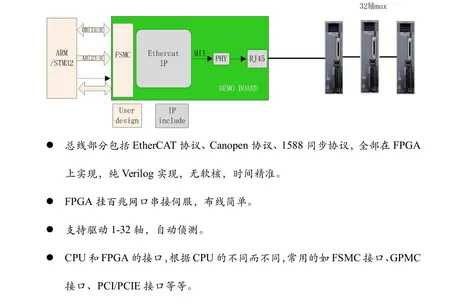
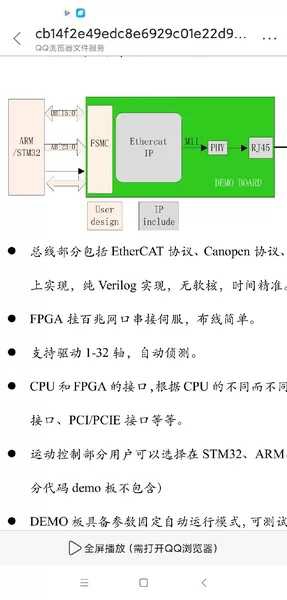
这是一个完整的 EtherCAT 主站系统,基于 FPGA 实现,支持最多 32 个伺服轴的实时同步控制。系统通过 EtherCAT 协议与从站(伺服驱动器)通信,实现高性能的多轴运动控制,适用于工业自动化、机器人、CNC 等场景。
📁 **模块功能分解**
1. **`ECAT_TOP.v`**
- 顶层模块,集成所有子模块。
- 负责时钟生成、复位控制、接口调度。
- 连接外部以太网 PHY、ARM 处理器接口(如 GPIO、手轮、参数配置等)。
2. **`ECAT_ARB.v`**
- 仲裁器,管理多个伺服轴的初始化顺序。
- 根据
Wkc(Working Counter)判断伺服初始化完成状态。 - 生成伺服索引、参数设置序列、安全状态信号。
3. **`ECAT_CONST.v`**
- 常量存储器,存储 EtherCAT 初始化、同步、参数设置等阶段所需的命令数据。
- 使用
case语句实现 ROM 功能,地址由ECATARB和ECATSYNC提供。
4. **`ECAT_INIT_CTRL.v`**
- 初始化控制器,协调伺服驱动器的启动流程(PreOp → SafeOp → Op)。
- 支持 SDO(Service Data Object)参数读写,用于伺服参数配置。
5. **`ECAT_SYNC.v`**
- 分布式时钟(DC)同步模块,实现所有伺服的时间同步。
- 通过读写 ESC(EtherCAT Slave Controller)寄存器(如 0x900, 0x910, 0x920, 0x928)完成时钟校准。
6. **`ECAT_PROCESS_DAT_REF.v`**
- 过程数据刷新控制器,周期性发送 PDO(Process Data Object)命令。
- 根据系统时间和循环周期(如 2ms)生成同步触发信号(
RefReq)。
7. **`ETH_DAT_TX.v`**
- 以太网数据发送构造器,组装 EtherCAT 帧:
- 初始化命令帧
- 同步帧(DC)
- 过程数据帧(PDO)
- SDO 参数读写帧
8. **`ETH_TX.v`**
- 以太网发送控制器,处理 MAC 层封装、CRC32 计算、数据帧发送。
9. **`ETH_RX.v`**
- 以太网接收解析器,解析从站响应:
- 提取伺服状态字、实际位置、SDO 响应等。
- 检测超时、链路故障(
chain_bad)。
10. **`Interface.v`**
- ARM-FPGA 接口模块,实现双端口寄存器映射。
- 提供伺服控制字(CtlW)、目标位置(TargetPos)的写入接口。
- 读取伺服状态字(Sts)、实际位置(EncoderPos)、故障信息等。
11. **`pos_buf.v`**
- 位置缓冲区,实现目标位置的 FIFO 管理。
- 支持抖动控制、虚拟轴模式、手轮输入。
12. **`SERVO_CTLW.v`**(未完整提供)
- 伺服控制字状态机,处理伺服使能、回零模式等控制流程。
🔄 **工作流程简介**
- 初始化阶段:
- FPGA 上电后,ARM 配置伺服参数(如 SM 地址、周期时间)。
- 通过 SDO 配置伺服参数(如模式、增益等)。
- 伺服依次进入PreOp→SafeOp→Op状态。
- 同步阶段:
- 主站与参考从站同步系统时间。
- 所有从站校准本地时钟,实现纳秒级同步。
- 运行阶段:
- 主站周期性发送 PDO 命令(控制字、目标位置)。
- 从站返回状态字、实际位置。
- 支持在线参数修改、故障诊断、手轮干预。
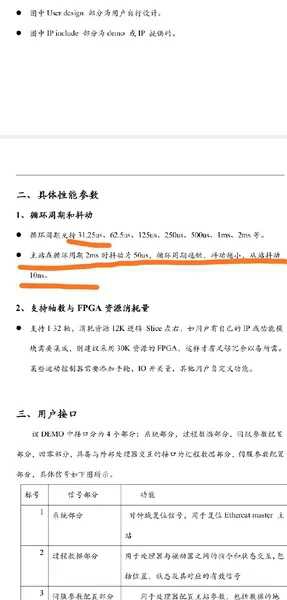
⚙️ **关键特性**
- 支持轴数:最多 32 轴(可配置)
- 同步精度:支持分布式时钟(DC),精度可达纳秒级
- 通信周期:可配置(典型 1~4ms)
- 接口:
- RMII 接口连接以太网 PHY
- 并行总线连接 ARM 处理器
- GPIO、手轮、数字 IO 扩展
- 功能:
- 伺服参数配置(SDO)
- 过程数据交换(PDO)
- 分布式时钟同步(DC)
- 虚拟轴模拟
- 故障诊断与链断检测
✅ **总结**
这套代码是一个完整、高性能的 EtherCAT 主站 IP 核,适用于 FPGA 实现的多轴实时运动控制系统。其设计严谨,支持标准的 EtherCAT 协议栈,具备工业级的可靠性和灵活性。
一份EtherCAT主站的FPGA Verilog代码 ethercat 主站 FPGA verilog 代码 使用FPGA逻辑实现EtherCAT协议,实现主站DC功能。更加突出了EtherCAT现场总线的同步性能及高效性 基于FPGA的EtherCAT主站设计研究 基于FPGA的EtherCAT主站方案 基于FPGA的EtherCAT主站研究 一种基于FPGA实现的EtherCAT主站运动控制器的制作方法 基于FPGA的EtherCAT主站实现与高性能运动控制 基于FPGA的高性能硬件EtherCAT主站研究

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐
 25
25 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)