移动机器人路径规划之人工势场法:原理、实现与不足
移动机器人路径规划(人工势场法),本次路径规划的代码是基于matlab语言的,该方法的基本思想是机器人受到来自目的地的引力以及受到来自障碍物的斥力。这 些力形成合力后驱使机器人避开障碍物后移向目的地。人工势场法算法简单易于实现但 该方法也存在着很多不足。为此现在出现了很多关于改进人工势场法的算法。势场法较 容易实施,尽管它存在理论上的局限性,但它在移动机器人应用中已经成为一种普通的工 具。通过构造
移动机器人路径规划(人工势场法),本次路径规划的代码是基于matlab语言的,该方法的基本思想是机器人受到来自目的地的引力以及受到来自障碍物的斥力。 这 些力形成合力后驱使机器人避开障碍物后移向目的地。 人工势场法算法简单易于实现但 该方法也存在着很多不足。 为此现在出现了很多关于改进人工势场法的算法。 势场法较 容易实施,尽管它存在理论上的局限性,但它在移动机器人应用中已经成为一种普通的工 具。 通过构造人工势场来进行避障,并且能准确快速的到达目的地。

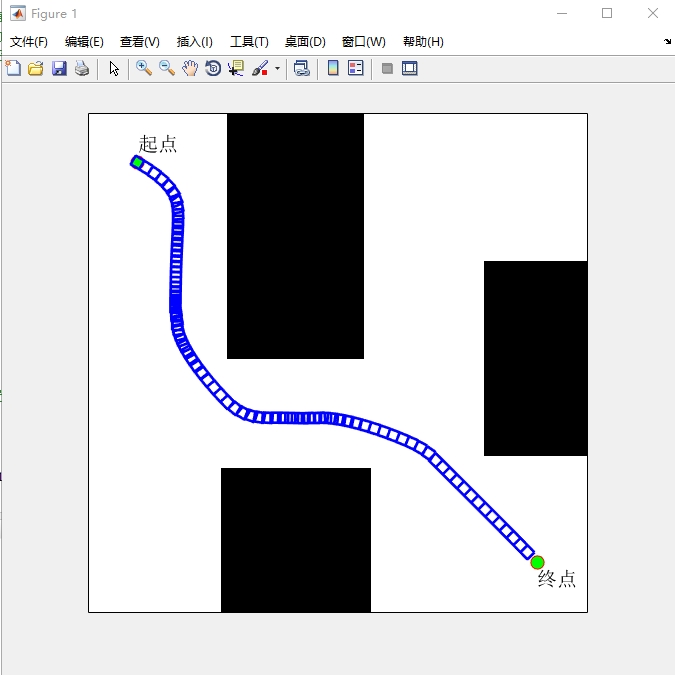
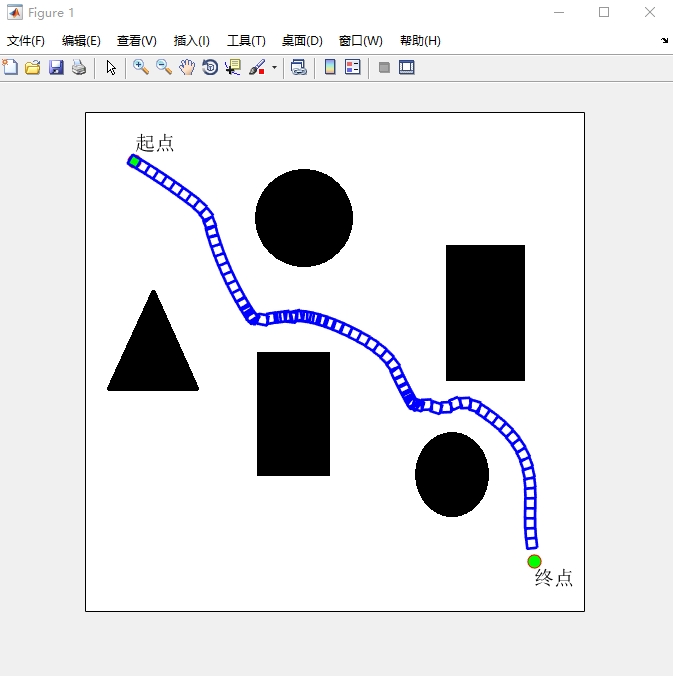
在移动机器人路径规划的领域里,人工势场法是一种颇为有趣且常用的方法。它的基本思想就像是赋予了机器人一种“力的感知”,让机器人同时受到来自目的地的引力以及来自障碍物的斥力,这些力形成合力后,就驱使着机器人巧妙地避开障碍物,一步一步移向目的地。
Matlab代码实现
下面咱们就看看基于Matlab语言实现人工势场法的代码片段:
% 定义环境参数
obstacle_x = [10, 20, 30]; % 障碍物x坐标
obstacle_y = [10, 20, 30]; % 障碍物y坐标
goal_x = 50; % 目标点x坐标
goal_y = 50; % 目标点y坐标
robot_x = 0; % 机器人初始x坐标
robot_y = 0; % 机器人初始y坐标
% 定义参数
k_att = 1; % 引力系数
k_rep = 100; % 斥力系数
q0 = 5; % 斥力影响范围
for i = 1:100 % 迭代步数
% 计算引力
att_x = k_att * (goal_x - robot_x);
att_y = k_att * (goal_y - robot_y);
% 初始化斥力
rep_x = 0;
rep_y = 0;
for j = 1:length(obstacle_x)
dist = sqrt((robot_x - obstacle_x(j))^2 + (robot_y - obstacle_y(j))^2);
if dist < q0
rep_x = rep_x + k_rep * (1/dist - 1/q0) * (robot_x - obstacle_x(j)) / dist^2;
rep_y = rep_y + k_rep * (1/dist - 1/q0) * (robot_y - obstacle_y(j)) / dist^2;
end
end
% 计算合力
total_force_x = att_x + rep_x;
total_force_y = att_y + rep_y;
% 更新机器人位置
robot_x = robot_x + total_force_x;
robot_y = robot_y + total_force_y;
end代码分析
- 环境参数定义:咱们先设定了障碍物的位置、目标点的位置以及机器人的初始位置。这些参数就像是给机器人设定了一个“游戏场景”,告诉它目标在哪,哪些地方有障碍物不能去。
- 参数定义:引力系数
katt和斥力系数krep很关键,它们决定了引力和斥力的强度。q0定义了斥力的影响范围,距离障碍物小于这个范围,斥力就会起作用。 - 引力计算:通过
k_att乘以目标点与机器人当前位置的差值,得到引力在x和y方向的分量。这就像是目标点在“召唤”机器人,引力越大,召唤力越强。 - 斥力计算:遍历每个障碍物,计算机器人与障碍物的距离。如果距离小于斥力影响范围
q0,就根据公式计算斥力在x和y方向的分量。这里的斥力公式,是随着距离减小而增大,保证机器人能在靠近障碍物时,被有力地推开。 - 合力计算与位置更新:把引力和斥力在x和y方向的分量分别相加,得到合力的分量。然后根据合力来更新机器人的位置,模拟机器人在合力作用下的移动。
人工势场法的优缺点
人工势场法算法简单,易于实现,这使得它在移动机器人路径规划的入门和快速原型开发中非常受欢迎。就像上面的代码,短短几十行就能实现一个基本的路径规划。而且它能通过构造人工势场,让机器人比较准确快速地到达目的地,在一些简单环境中表现良好。
移动机器人路径规划(人工势场法),本次路径规划的代码是基于matlab语言的,该方法的基本思想是机器人受到来自目的地的引力以及受到来自障碍物的斥力。 这 些力形成合力后驱使机器人避开障碍物后移向目的地。 人工势场法算法简单易于实现但 该方法也存在着很多不足。 为此现在出现了很多关于改进人工势场法的算法。 势场法较 容易实施,尽管它存在理论上的局限性,但它在移动机器人应用中已经成为一种普通的工 具。 通过构造人工势场来进行避障,并且能准确快速的到达目的地。
然而,该方法也存在着很多不足。比如,它容易陷入局部最小值。想象一下,在某些特殊的障碍物布局下,机器人周围的斥力和引力形成了一个“陷阱”,合力为零,机器人就被困住,无法到达目标点了。而且,势场法存在理论上的局限性,在复杂环境中,可能会出现振荡或者路径不是最优等问题。
不过尽管如此,势场法在移动机器人应用中已经成为一种普通的工具。为了克服它的不足,现在也出现了很多关于改进人工势场法的算法,比如结合其他启发式算法,或者对斥力引力模型进行优化,让机器人在复杂环境中也能游刃有余地规划出更好的路径。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐
 4
4 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)