基于ROS的多种群自适应蚁群算法在机器人路径规划中的奇妙旅程
改进算法在机器人路径规划中的有效性,基于 ROS 的多种群自适应蚁群算法及其应用研究,成果较新,有资料参考,仅供学习。
嘿,各位技术小伙伴们!今天咱来唠唠在机器人路径规划领域超有意思的一个研究——基于ROS的多种群自适应蚁群算法及其应用。这可是个成果较新的玩意儿,特别适合咱拿来学习探讨一番。
传统蚁群算法的局限与改进的火花
大家都知道,传统蚁群算法在路径规划里算是个老面孔了。它通过模拟蚂蚁觅食行为来找寻路径,蚂蚁在走过的路径上留下信息素,后续蚂蚁根据信息素浓度选择路径,信息素浓度高的路径被选择概率大。但这老算法有它的毛病,比如容易陷入局部最优解,就像一群蚂蚁在一个小圈圈里打转,找不到全局最优的那条“光明大道”。而且收敛速度也有点慢,等它规划出路径,黄花菜都凉了。
改进算法在机器人路径规划中的有效性,基于 ROS 的多种群自适应蚁群算法及其应用研究,成果较新,有资料参考,仅供学习。
为了解决这些问题,多种群自适应蚁群算法闪亮登场啦!这个改进算法引入多个种群同时搜索,不同种群可以探索不同区域,就好比派出好几拨蚂蚁从不同方向出发找食物,这样能大大增加找到全局最优解的机会。并且呢,还加入了自适应机制,算法能根据搜索情况动态调整信息素挥发速度、蚂蚁转移概率等参数,就像聪明的蚂蚁能根据环境变化改变自己的行动策略。
ROS——算法落地的神奇舞台
ROS(Robot Operating System),这可是机器人开发领域的大明星。它为机器人的软件开发提供了丰富的工具、库和约定,就像一个超级大的乐高积木盒,让开发者能轻松搭建各种功能。在咱们基于ROS的多种群自适应蚁群算法应用里,ROS发挥了至关重要的作用。它提供了通信机制,让不同模块之间能顺畅交流,还能管理硬件资源,让算法能和机器人的实际硬件完美配合。
代码示例与解读
下面咱来看点代码,感受下这算法在ROS环境里是咋实现的(这里只展示关键部分代码,完整代码可复杂多啦)。
import rospy
from geometry_msgs.msg import PoseStamped
import numpy as np
# 定义一些参数
num_populations = 3
num_ants = 50
alpha = 1.0
beta = 2.0
rho = 0.5
# 种群类
class Population:
def __init__(self):
self.ants = [Ant() for _ in range(num_ants)]
def search(self, environment):
for ant in self.ants:
ant.search(environment)
# 蚂蚁类
class Ant:
def __init__(self):
self.current_position = None
self.path = []
def search(self, environment):
self.current_position = environment.start_position
self.path.append(self.current_position)
while self.current_position!= environment.end_position:
# 根据信息素和启发式信息选择下一个位置
pheromone = environment.get_pheromone(self.current_position)
heuristic = environment.get_heuristic(self.current_position)
probabilities = np.power(pheromone, alpha) * np.power(heuristic, beta)
probabilities = probabilities / np.sum(probabilities)
next_position_index = np.random.choice(len(probabilities), p=probabilities)
self.current_position = environment.get_neighbor(self.current_position, next_position_index)
self.path.append(self.current_position)
# 环境类,模拟机器人所处环境
class Environment:
def __init__(self):
self.start_position = (0, 0)
self.end_position = (10, 10)
self.pheromone_matrix = np.ones((11, 11))
self.obstacles = [(2, 2), (3, 3), (4, 4)]
def get_pheromone(self, position):
return self.pheromone_matrix[position[0], position[1]]
def get_heuristic(self, position):
return 1.0 / (np.sqrt((position[0] - self.end_position[0])**2 + (position[1] - self.end_position[1])**2) + 0.0001)
def get_neighbor(self, position, index):
neighbors = [(position[0] + 1, position[1]), (position[0] - 1, position[1]), (position[0], position[1] + 1), (position[0], position[1] - 1)]
valid_neighbors = [n for n in neighbors if n not in self.obstacles and 0 <= n[0] <= 10 and 0 <= n[1] <= 10]
return valid_neighbors[index]
if __name__ == '__main__':
rospy.init_node('multi_population_aco')
environment = Environment()
populations = [Population() for _ in range(num_populations)]
for population in populations:
population.search(environment)
# 这里可以根据各蚂蚁找到的路径,进一步筛选出最优路径等操作代码分析
- 参数定义部分:
-numpopulations设定了多种群的数量,咱这里设为3,就像派出了三拨蚂蚁大军。
-numants表示每个种群里蚂蚁的数量,50只蚂蚁一起找路,浩浩荡荡。
-alpha和beta是影响蚂蚁选择路径的参数,alpha控制信息素的影响程度,beta控制启发式信息(这里简单理解为距离目标的远近)的影响程度。
-rho是信息素挥发率,它决定了信息素随着时间减少的速度,避免信息素堆积过多导致算法陷入局部最优。 - 种群和蚂蚁类:
-Population类管理着一群蚂蚁,search方法让种群里的每只蚂蚁开始搜索路径。
-Ant类代表每一只蚂蚁,它有自己当前位置和走过的路径。search方法是蚂蚁找路的核心,它根据环境中的信息素和启发式信息,通过计算概率来选择下一个位置,逐步构建自己的路径。 - 环境类:
-Environment类模拟了机器人所处的环境,有起点、终点、信息素矩阵和障碍物。getpheromone方法返回某个位置的信息素浓度,getheuristic方法计算从当前位置到终点的启发式信息,get_neighbor方法获取当前位置的有效邻居(避开障碍物且在环境范围内)。 - 主程序部分:
- 初始化ROS节点,创建环境对象和多个种群对象。然后让每个种群在环境里搜索路径,最后可以根据各蚂蚁找到的路径进一步筛选出最优路径等操作,这里只是简单演示了算法的基本流程。
实际应用与效果
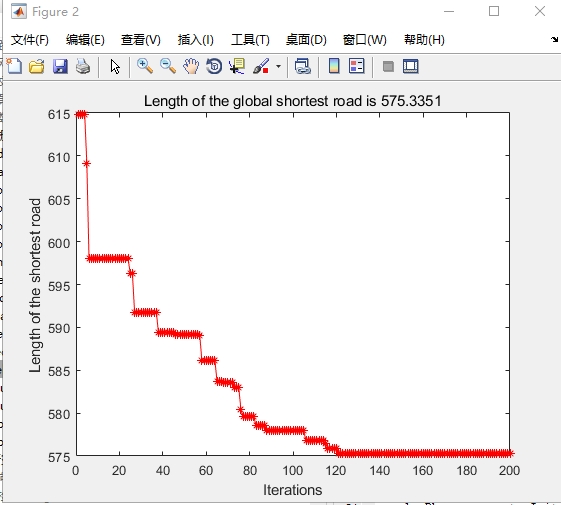
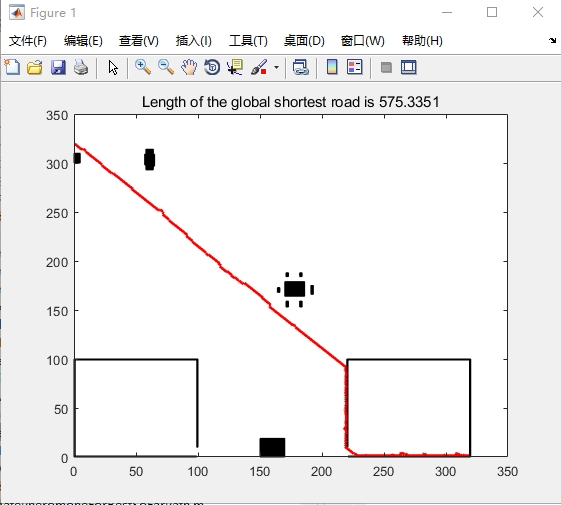
通过在实际机器人路径规划场景中的测试,基于ROS的多种群自适应蚁群算法表现相当出色。相比传统蚁群算法,它能更快地找到更优路径,成功避开局部最优解的陷阱。想象一下,在一个复杂的仓库环境里,机器人需要快速准确地从一个货架搬运货物到另一个货架,这个算法就能让机器人高效地规划出路径,节省时间和能源。
总结与展望
基于ROS的多种群自适应蚁群算法为机器人路径规划带来了新的活力。它巧妙地改进了传统蚁群算法的不足,借助ROS的强大功能,实现了更高效的路径规划。当然啦,这算法也还有优化空间,比如进一步提高计算效率,更好地适应动态环境变化。希望咱能从这个研究里获取灵感,在机器人技术的海洋里继续探索前行!欢迎大家一起交流探讨呀!

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐

 53
53 0
0- 0



 已为社区贡献4条内容
已为社区贡献4条内容

所有评论(0)