ROS入门
前言:苯人已经在vscode中配置好WSL开发环境,后续程序都均在基于 WSL 的 Ubuntu 子系统中运行
ROS简介
ROS包含大量搭建机器人所需要的软件和工具,是目前应用最为广泛的机器人操作系统
ROS的核心是通信,有四大核心通信机制:
话题Topic:基于发布-订阅模式,运行节点之间单向、异步交换数据,发布者只发不接收,订阅者只收不回应,适合高频、实时、无反馈要求的数据流传输
服务Service:双向同步通信方式,客户端发送请求,服务端处理并返回响应。适合低频、有明确结果要求的一次性操作
参数Parameter:用于机器人参数的设置、读取与动态修改,是 ROS 中统一的配置管理机制
动作Action:带反馈、可中断、异步的复杂逻辑控制,可根据实时反馈做过程处理,最终返回结果。专门解决 Service 无法处理的长时间复杂任务
启动海龟模拟器
相当于学习编程语言时编写“Hello world”
打开终端,输入如下代码,输入部分首字母后可按Tab键自动补全
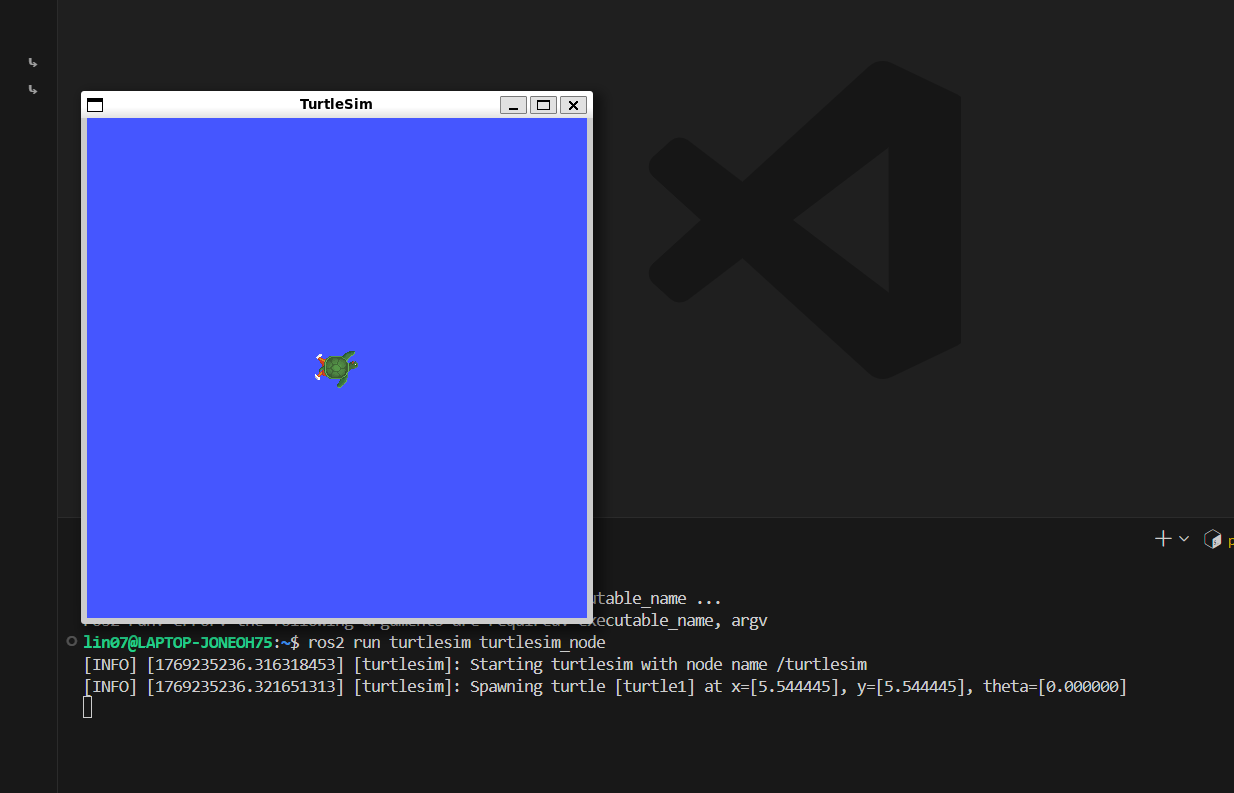
ros2 run turtlesim turtlesim_node
// 功能包名字 可执行文件的名字下图的蓝色窗口就是小海龟模拟器了
使用键盘控制小海龟
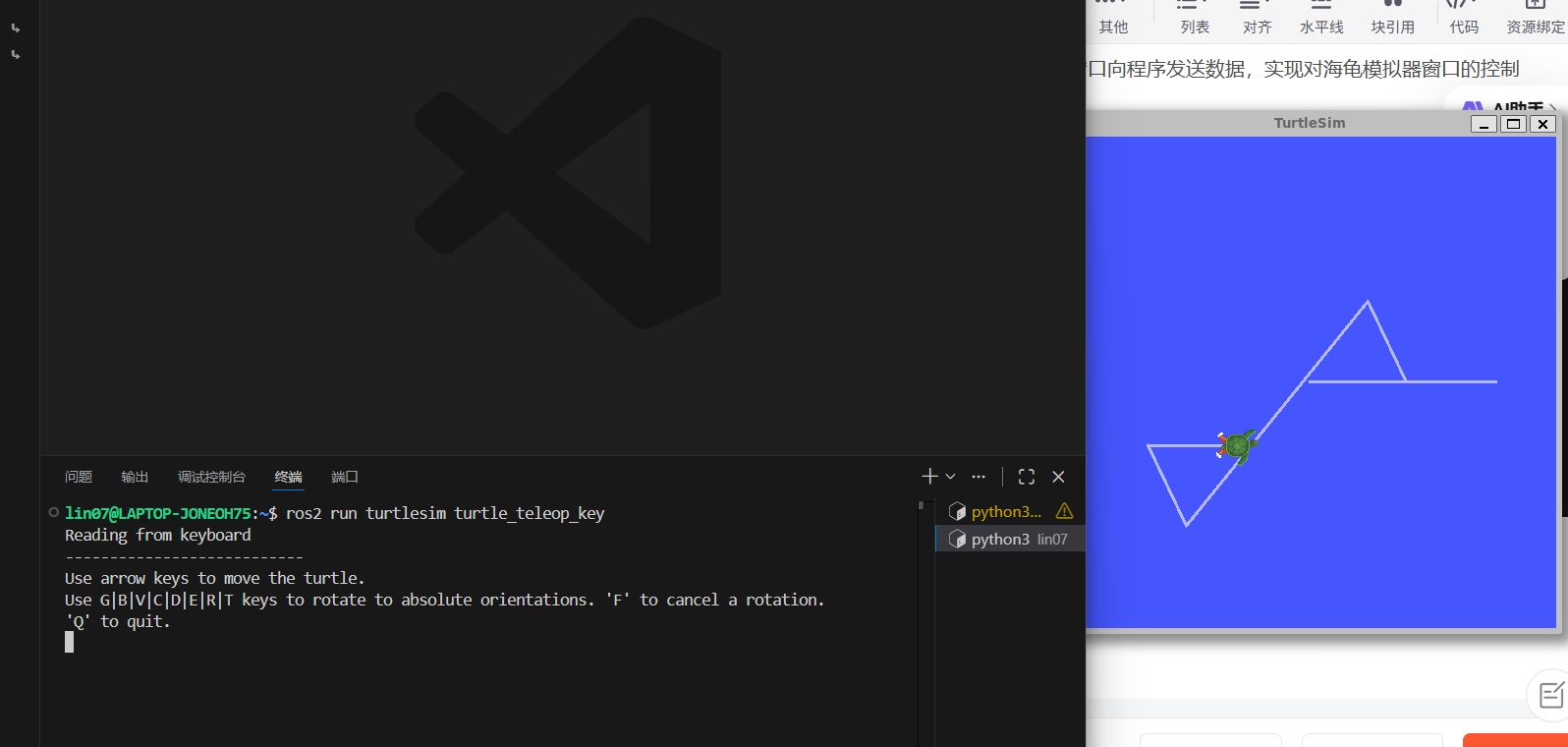
需要在键盘控制窗口输入指令,由键盘窗口向程序发送数据,实现对海龟模拟器窗口的控制
打开一个新的终端,输入如下命令,打开按键控制
ros2 run turtlesim turtle_teleop_key
回车就可以进行控制了,注意,光标要放在该终端处,不是点海龟窗口。可能会遮挡什么的,自己调整合适窗口就可以了
rqt
rqt是ROS官方推出的可视化图形化工具框架(名字源于 “ROS Qt”,基于Qt框架开发),可以将ROS开发/运行中的各类调试、监控、配置操作从命令行迁移到可视化界面,是 ROS 开发中高频必备的调试工具
再打开一个终端,输入如下命令
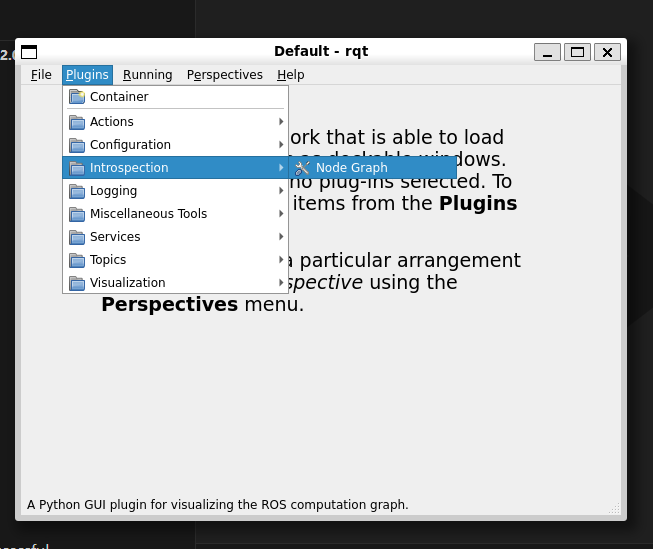
rqt
点击插件“Plugins”,选择“Introspection”->"Node Graph"
界面如下,可使用鼠标滚轮放大
也可点击工具栏的“Fit”,调整视图
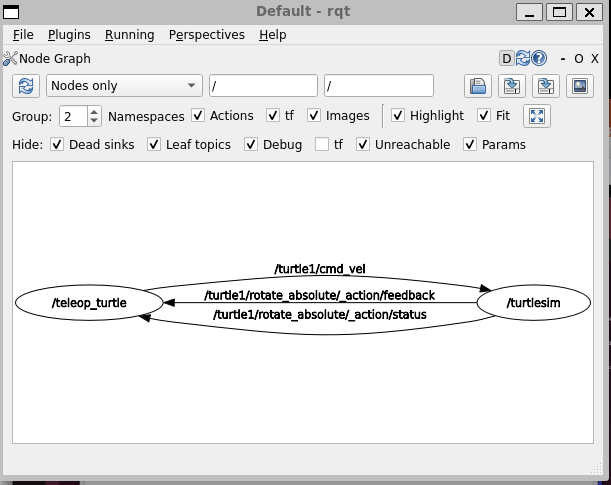
可以看得“teleop_turtle”(海龟键盘控制节点)和“turtlesim_node”(小海龟模拟器节点)两个节点
teleop_turtle发布了“/turtle1/cmd_vel”话题,并通过该话题向turtlesim_node节点发送速度控制数据(cmd_vel)
/turtle1/cmd_vel是ROS2 turtlesim的默认速度控制话题,turtle1是话题的命名空间 (用于区分多只海龟,生成新海龟后会有/turtle2/cmd_vel),cmd_vel是话题的核心标识,代表 “速度指令”,是ROS 中机器人速度控制的通用话题名。
整个流程就是:teleop_turtle通过键盘获取你的操作,转换成线速度/角速度数据,通过/turtle1/cmd_vel话题发布,turtlesim_node持续订阅该话题,获取数据后控制小海龟移动
节点
节点是ROS 2的最小运行单元,由C++/Python等语言编写(后面的代码只展示Python),是ROS 2系统的基本组成单元和核心执行载体
职责单一:一个节点只做一件核心事
松耦合通信:节点间不直接交互,通过话题、服务、动作交换数据/调用功能
可独立启停/替换:单个节点的启动、关闭、修改,不会影响其他正常运行的节点
创建节点
rclpy是ROS 2官方提供的Python 语言核心客户端库,也是Python开发ROS2程序的唯一基础入口
注意,不能直接点击“运行”,要在终端指示明确“python3 文件夹名/Node.py”
# 导入核心依赖库
import rclpy
from rclpy.node import Node
def main():
rclpy.init() # 初始化rclpy库
node=Node("node") # 创建ROS2节点,指定唯一节点名
rclpy.spin(node) # 启动节点的运行循环(程序会停在这一行,直到节点被手动终止),同时持续监听ROS2的各类事件
rclpy.shutdown() # 关闭rclpy,释放ROS2相关资源
if __name__=="__main__":
main()运行后是没有输出的,会卡在.spin(),ctrl+C手动终止
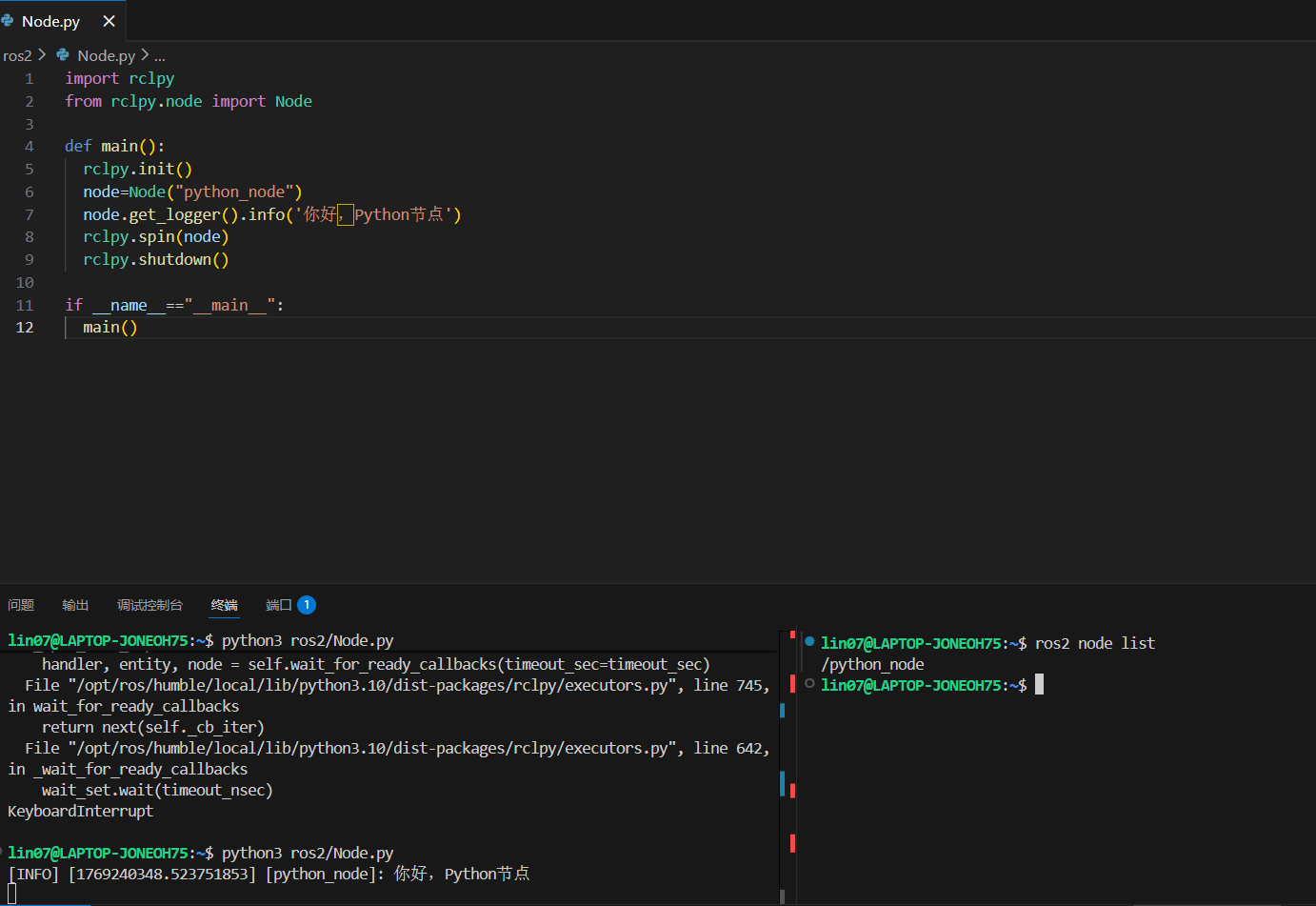
日志打印
ROS2节点的标准化日志输出方式
先通过节点对象获取ROS2的日志器(logger),专门用于节点的日志输出:node.get_logger()
然后指定日志级别为INFO(普通信息级别),还有warn(警告)、error(错误)等:.info()
括号里面填写日志的具体内容
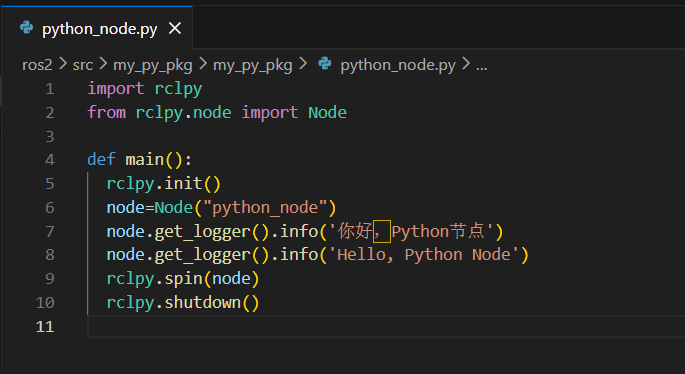
import rclpy
from rclpy.node import Node
def main():
rclpy.init()
node=Node("python_node")
node.get_logger().info('你好,Python节点')
rclpy.spin(node)
rclpy.shutdown()
if __name__=="__main__":
main()可以新建一个终端,通过“ros2 node list”查看当前运行节点
使用功能包组织节点
功能包是ROS2官方定义的标准化项目管理容器,专门用来组织、存放ROS2开发的所有相关文件。简单说,功能包是ROS2的项目文件夹。
节点的运行、编译依赖功能包的配置文件(声明依赖库、编译规则、节点入口),脱离功能包的节点代码,ROS2无法识别、无法通过colcon build编译、也无法用ros2 run启动
ROS2的核心启动命令ros2 run 功能包名 可执行文件,本质就是从指定功能包中找到并运行对应的节点可执行文件
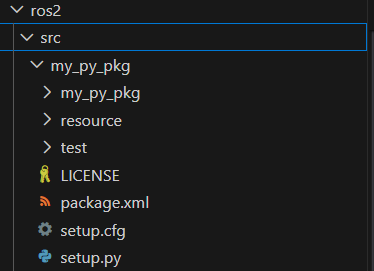
ROS2项目文件结构
~/ros2/ # 你的ROS2工作空间(根目录,可自定义命名)
└── src/ # 工作空间核心目录,所有功能包必须放在src下
└── my_py_pkg/ # 功能包(自定义命名)
├── my_py_pkg/ # 节点源码目录(与功能包同名)
│ └── node.py# 你的Python节点代码
├── package.xml# 功能包核心配置文件,声明包名、版本、依赖、作者等
└── setup.py # Python功能包编译配置文,声明节点可执行名、入口、安装路径等功能包创建步骤
cd ~/ros2 # 进入工作空间
mkdir -p src # 创建src目录,-p表示若已存在则不报错
cd src # 必须在src下创建功能包
ros2 pkg create --build-type ament_python --license Apache-2.0 my_py_pkg # 创建Python功能包,指定包名、语言、许可证
''' 也可直接指定依赖,但我想后面在文件中编辑
ros2 pkg create --build-type ament_python --dependencies rclpy my_py_pkg
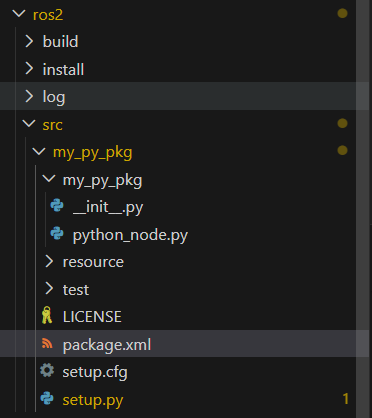
'''执行完上述命令后,my_py_pkg功能包目录的结构如下图。my_py_pkg子目录是Python 节点源码的专属存放目录(和功能包同名);resource子目录是ROS2功能包的元数据目录,存放包的标识信息,无需手动修改,由系统自动维护;test子目录是测试代码存放目录,用于编写单元测试或集成测试,新手阶段可以暂时忽略;LICENSE文件是功能包的开源许可证文件;package.xml文件是功能包的核心元信息与依赖声明文件,包含包名、版本、作者、依赖库等,ROS2系统通过它识别功能包的基本信息和依赖关系;setup.cfg文件是辅助配置文件,主要用于配置Python包的安装路径和脚本入口,一般无需手动修改;setup.py文件是Python功能包的编译与安装配置文件,核心作用是声明节点的可执行名、入口函数、安装路径等,是让你的 Python 节点能被ros2 run启动的关键配置文件。
我们在my_py_pkg子目录中存放我们前面写的节点代码,新建文件
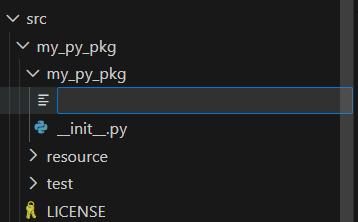
去掉if main的部分,执行colcon build编译时,ROS2会自动帮我们生成可执行文件调用这个代码
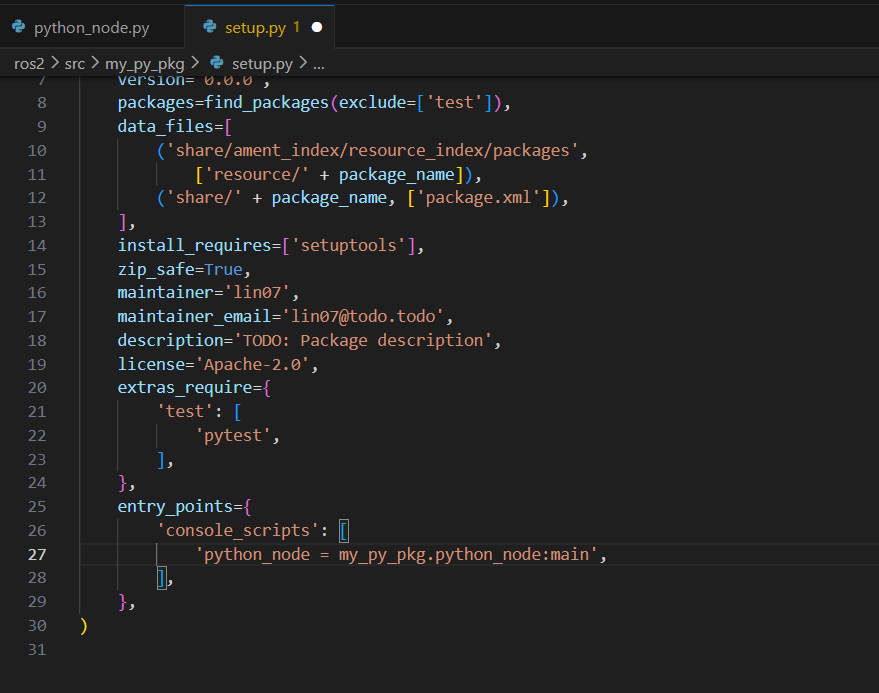
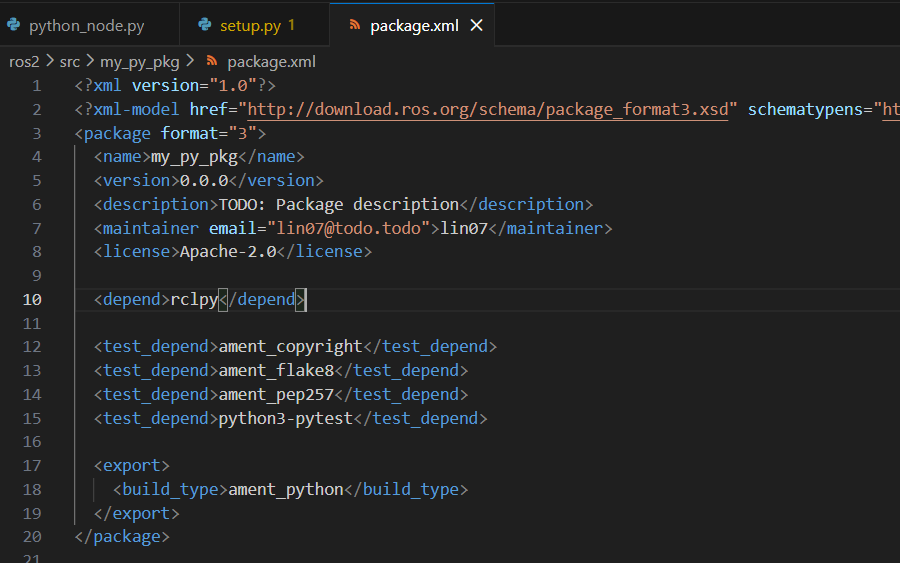
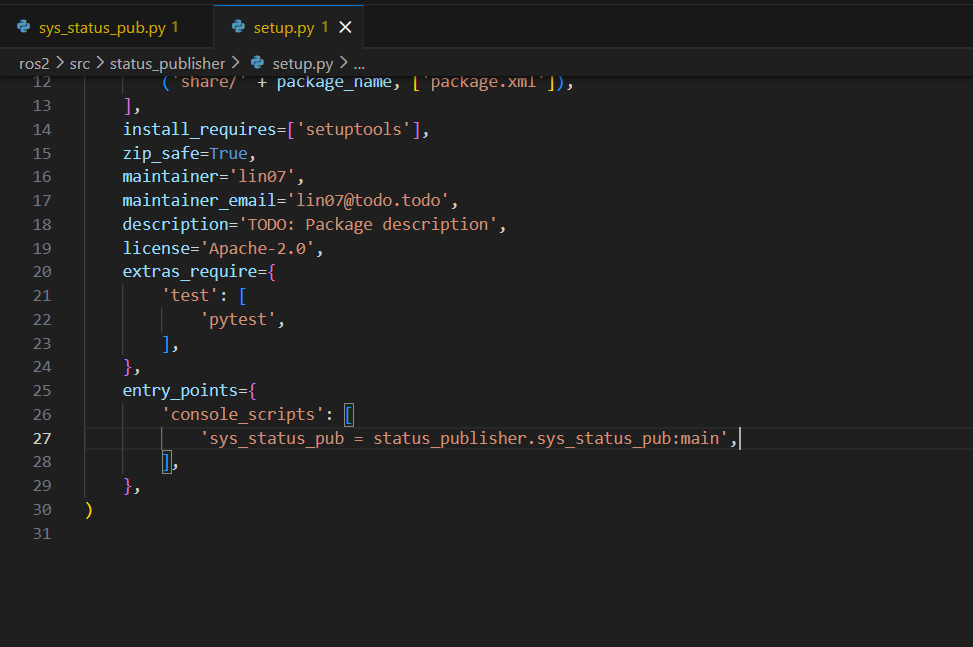
但需要去setup.py文件声明,找到entry_points里的console_scripts。第一个'python_node'是可执行文件名字,可自定义,后面是文件地址+要调用的函数名
我们的节点代码里的rclpy库还没添加,去package.xml文件中添加依赖声明
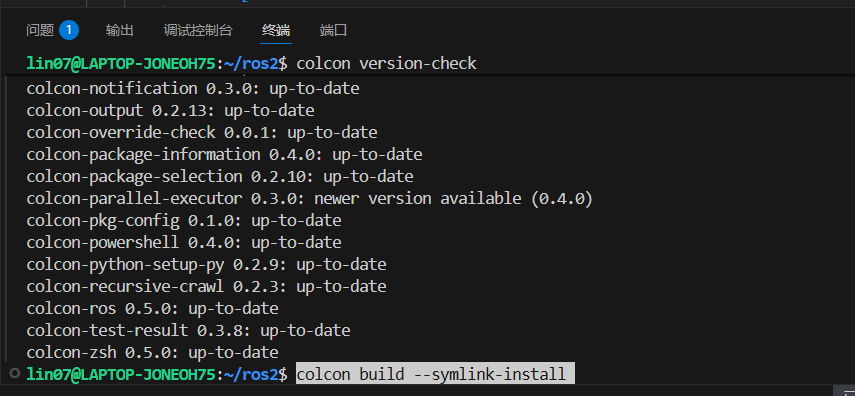
最后就可以该项目的构建功能包了,因为我的src文件夹下只有一个功能包,所以可以直接“colcon build”编译所有功能包(基础编译,修改代码后需重新编译),若有多个则“colcon build --packages-select 包名”编译指定功能包。“colcon build --symlink-install”命令更推荐,能创建源码软链接,修改Python代码无需重新编译(只适用于Python功能包构建)
但是软链接本质是指向源码的快捷方式,如果你后续移动了功能包的源码路径,或者在其他机器上复用编译后的包,软链接会失效,导致节点无法运行
规避方法:开发完成、准备发布 / 部署时,用普通的colcon build重新编译一次,生成独立的可执行文件,而非软链接
回车后的结果如下(警告是我开始的package.xml里用了过时的依赖标签,上面的代码均正确,已修改为新版的<depend>)

colcon build会在当前目录下生成build(编译构建目录,编译过程的临时工作目录)、install(安装部署目录,存储最终的编译产物)、log(日志记录目录)三个核心目录
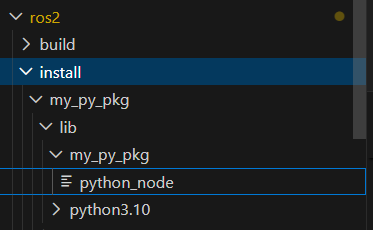
install目录下的lib文件夹是ROS2功能包可执行文件、运行依赖库、脚本入口的核心存储目录,是存放功能包运行资源的核心子目录
python_node是生成的可执行文件,文件名就是我们前面在setup.py文件中定义的可执行文件名称
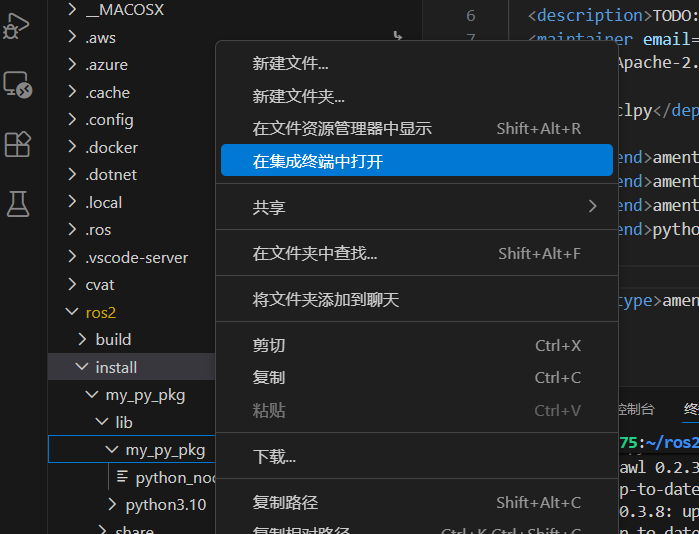
右键my_py_pkg文件夹,“在集成终端打开”
输入ls,列出当前目录下的文件和子目录。python_node是绿色的,表示它是可执行文件

因为我们前面是用“colcon build --symlink-install”构建的,我们修改src/里的.py文件后,无需重新编译,直接重启节点(中断正在运行的程序,重新运行)就能加载最新代码(若是使用colcon build构建的,则还需重新执行colcon build)
平时测试也可以不用功能包,直接写python测试(像开始创建节点那样)。
那为什么还要这么复杂?因为install文件是可以直接复制粘贴发送给别人用的(C++不能直接把源码发给别人吧,会泄露;python还好,它是解释型的语言)
运行可执行文件之前,还要使用source命令加载install/setup.bash脚本,配置环境变量,让功能包能被当前系统识别

然后就可以运行节点了(第一条命令是我查看一下功能包是否存在)

话题
先启动小海龟模拟器
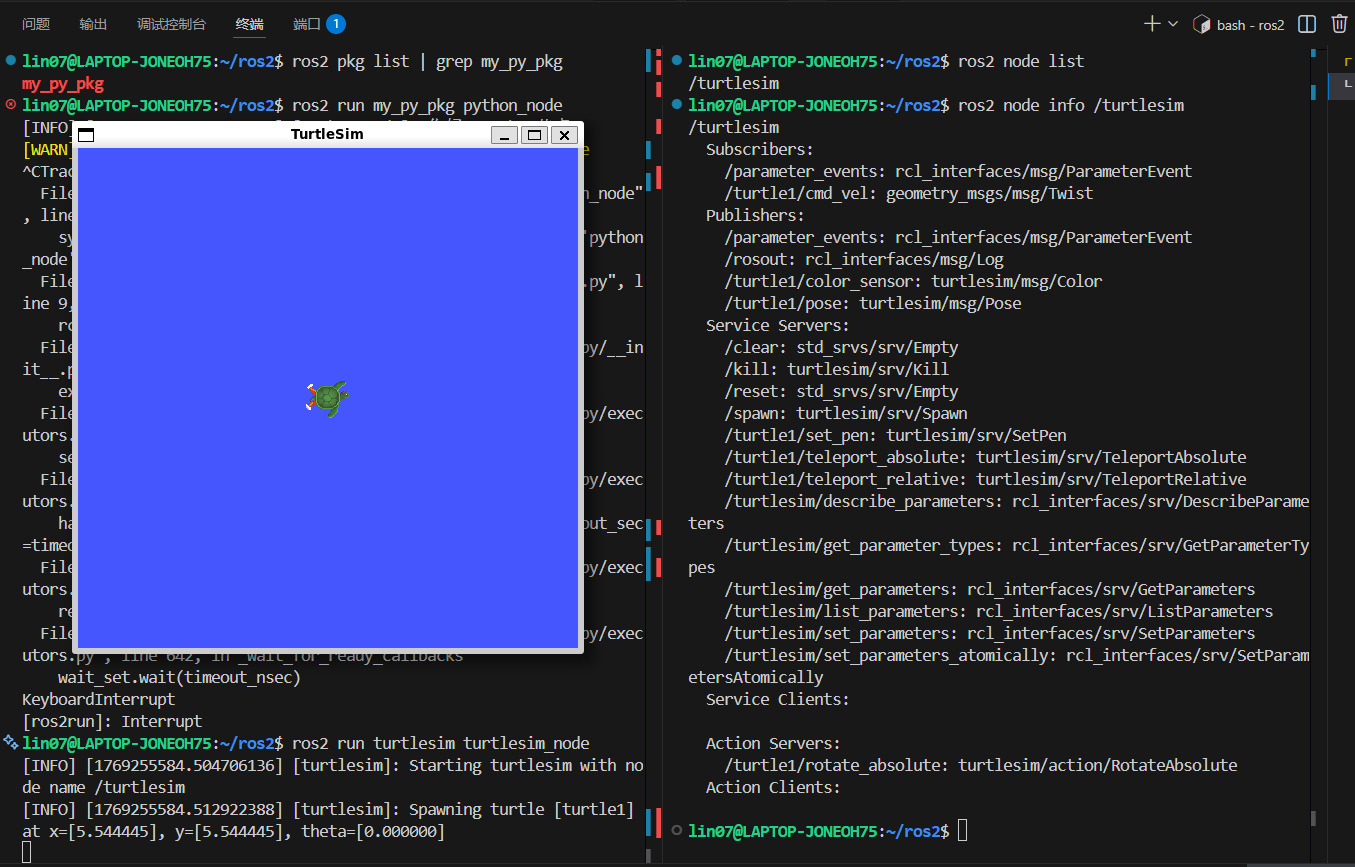
ros2 run turtlesim turtlesim_node再打开一个终端,使用如下命令查看节点信息
ros2 node list # 查看当前运行的所有ROS2节点
ros2 node info /turtlesim # 查看/turtlesim节点的完整详细信息Subscribers是一些订阅者,前者为话题的名字(如/turtle1/cmd_vel),后者为话题对应的消息类型/消息接口(如geometry_msgs/msg/Twist)(可以通过/turtle1/cmd_vel话题控制小海龟的移动)
Publishers是发布的话题,发布了/turtle1/pose 话题,类型为 turtlesim/msg/Pose,用来向外广播海龟的实时位置和姿态……
获取指定话题的消息数据
ros2 topic echo是话题消息的 “实时监听器”,执行后终端会实时监听并打印指定话题的消息数据
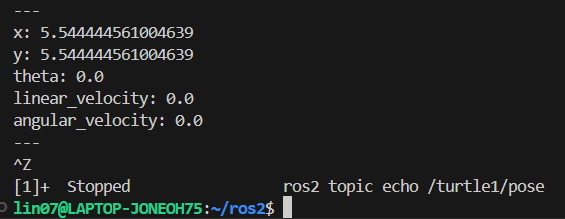
获取海龟的位置信息,话题指令前缀ros2 topic + 动作echo + 目标话题名称/turtle1/pose
ros2 topic echo /turtle1/pose会一直接收数据,可ctrl+C打断。x,y是x轴、y轴的坐标,theta表示乌龟脑袋的朝向,linear_velocity是线速度,angular_velocity是角速度
向指定话题发布数据
要先确认它的消息接口
我们之前使用键盘控制小海龟,其实也是发布/turtle1/cmd_vel话题进行控制的
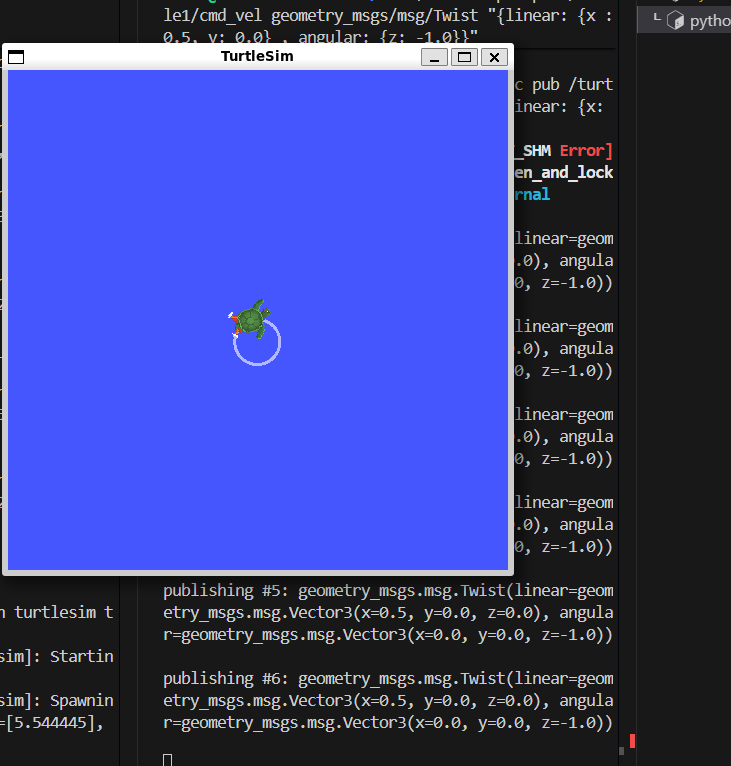
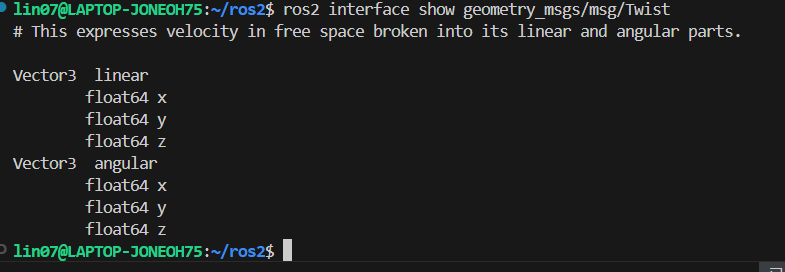
ros2 topic pub是ROS2操作话题的发布指令,核心指令ros2 topic pub + 目标话题名/turtle1/cmd_vel + 消息类型geometry_msgs/msg/Twist + 消息数据
ros2 topic pub /turtle1/cmd_vel geometry_msgs/msg/Twist "{linear: {x: 0.5, y: 0.0} , angular: {z: -1.0}}"又有线速度又有角速度,显然这会画一个圆
可以通过ros2 interface show命令,查看查看消息 / 服务 / 动作接口定义的标准指令
话题通信实践
任务:1.制作一个工具,通过这个工具可以看到系统的实时状态信息,包括记录信息的时间、主机名称、CPU使用率、内存使用率、内存总大小、剩余内存、网络接收数据量和网络发送数据量。2.要有一个简单的界面,可以将系统信息显示出来。3.局域网内的其它主机上也能查看数据。
(不好意思,苯人想要全用Python编程的美好幻想破灭了,还是要使用C++了,但思想应该都是一样的)
1.Python的psutils库可以获取系统状态信息。2.Qt可做界面展示。3.ROS2话题进行共享数据
所以我们用python编写系统状态信息的发布节点,C++编写订阅节点并显示,通过话题通信。每个话题都有对应的接口类型,ROS2已有的接口没有满足我们需求的,所以我们要先自定义通信接口。
自定义通信接口
接口也是在功能包里定义的(名称大家自定义,我是将之前工作空间里的内容清理了)
mkdir ros2 #创建工作空间
cd ros2 #进入工作空间
mkdir -p src #创建src目录
cd src #进入src创建一个纯接口功能包,不包含任何节点代码,专门用于项目中所有节点(Python/C++均可)共享数据规范,这是ROS2模块化开发的标准做法(未手动指定--build-type ament_python,会默认生成CMake 类型功能包。ROS2 的纯接口功能包,只能是 CMake 类型,因为接口生成工具rosidl_default_generators仅支持CMake构建系统)
ros2 pkg create status_interfaces --dependencies builtin_interfaces rosidl_default_generators --license Apache-2.0
# 核心指令 自定义包名 依赖参数 内置接口包 接口生成器包 证书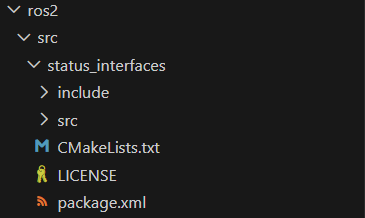
在status_interfaces功能包下新建一个msg文件夹
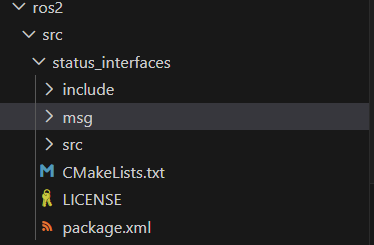
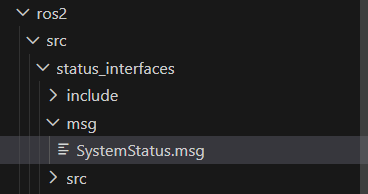
在msg文件夹下创建消息接口文件SystemStatus.msg
可以通过以下代码查找与时间相关的接口
ros2 interface list | grep Time
如果你的消息接口文件(.msg文件)依赖其它功能包下的消息接口,中间的“/msg”要去掉
定义消息格式文件
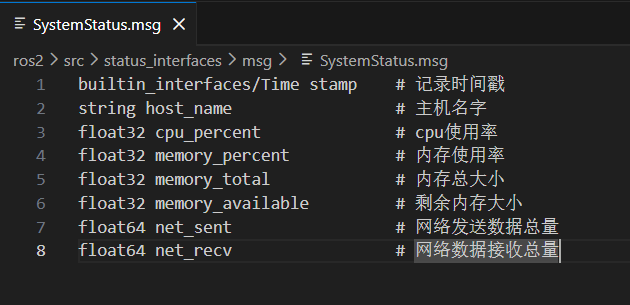
.msg文件在CMakeLists.txt文件中配置一下就能转换为代码
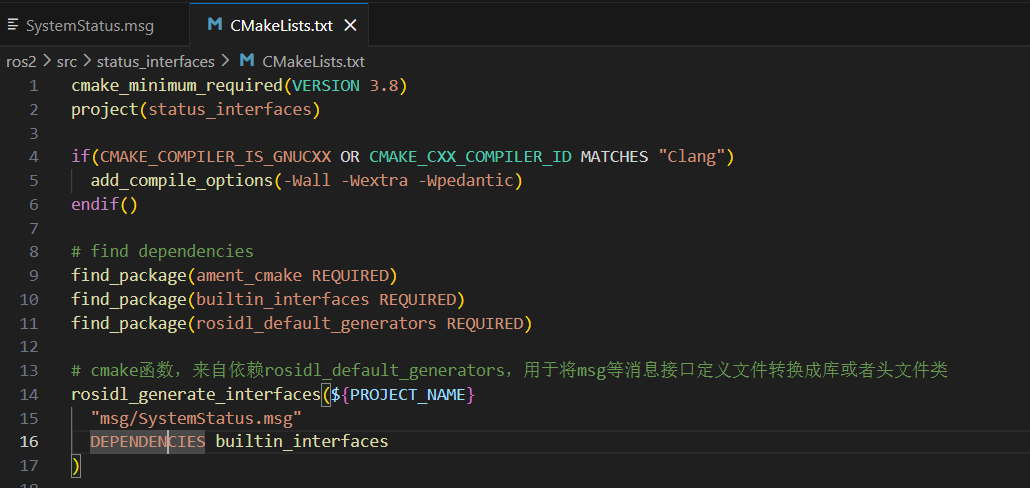
添加代码如下
# cmake函数,来自依赖rosidl_default_generators,用于将msg等消息接口定义文件转换成库或者头文件类
rosidl_generate_interfaces(${PROJECT_NAME}
"msg/SystemStatus.msg"
DEPENDENCIES builtin_interfaces
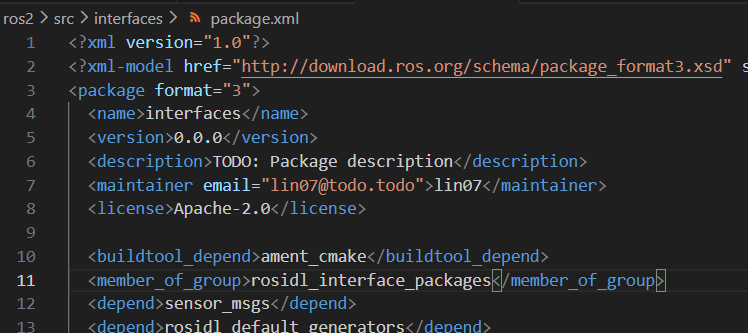
)还要在package.xml中添加如下命令,标明这是一个包含消息接口的功能包
<member_of_group>rosidl_interface_packages</member_of_group>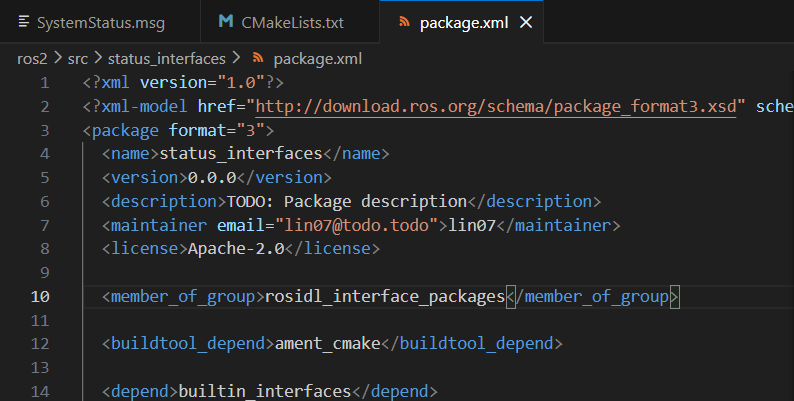
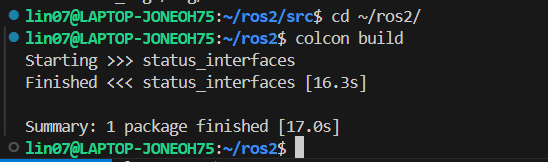
回到工作空间,进行项目构建
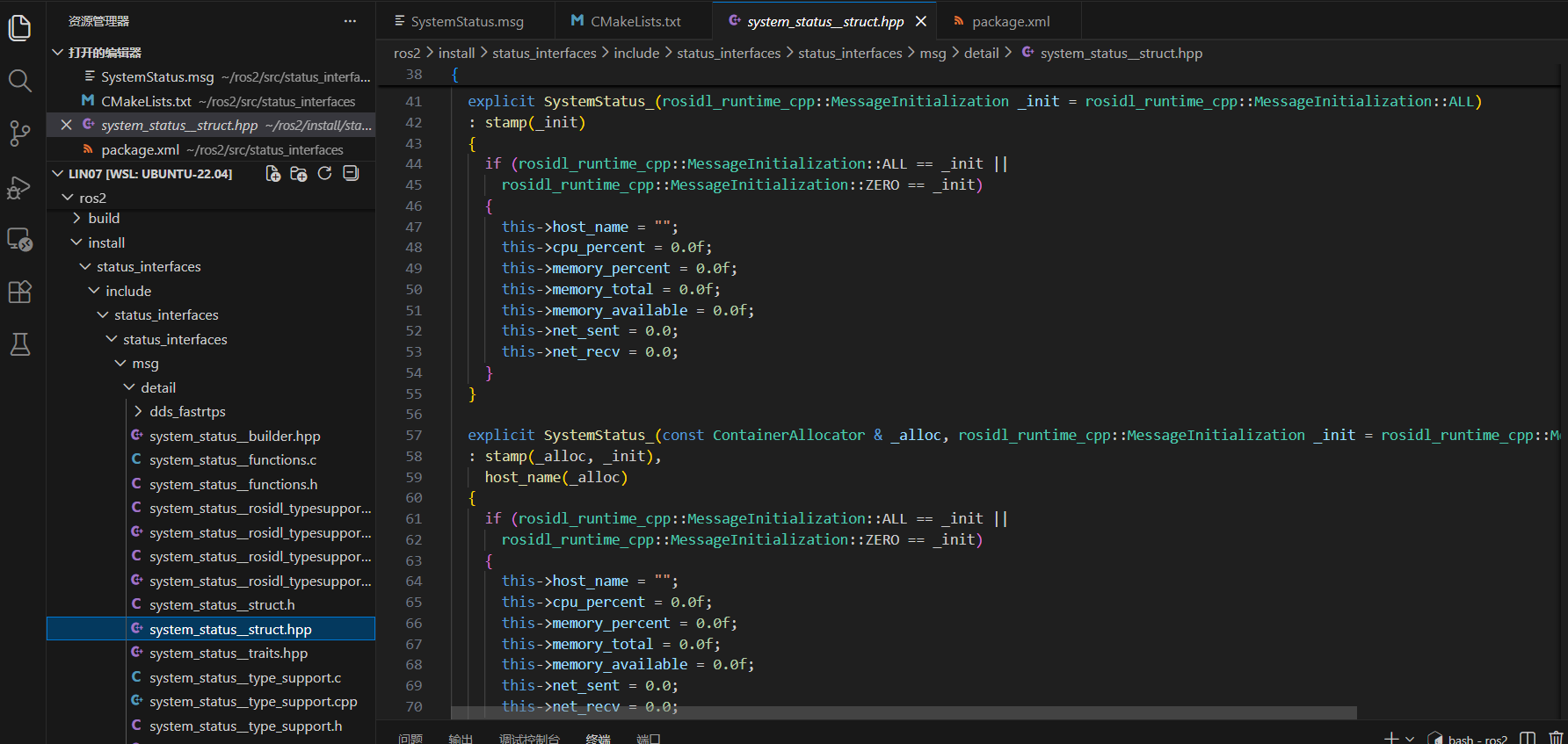
按我图示路径可以发现SystemStatus_类,它的成员就是我们前面定义的消息接口信息,这就是自动构建的C++版本的消息接口
Python版本的在local/lib目录下(前面的是include目录)
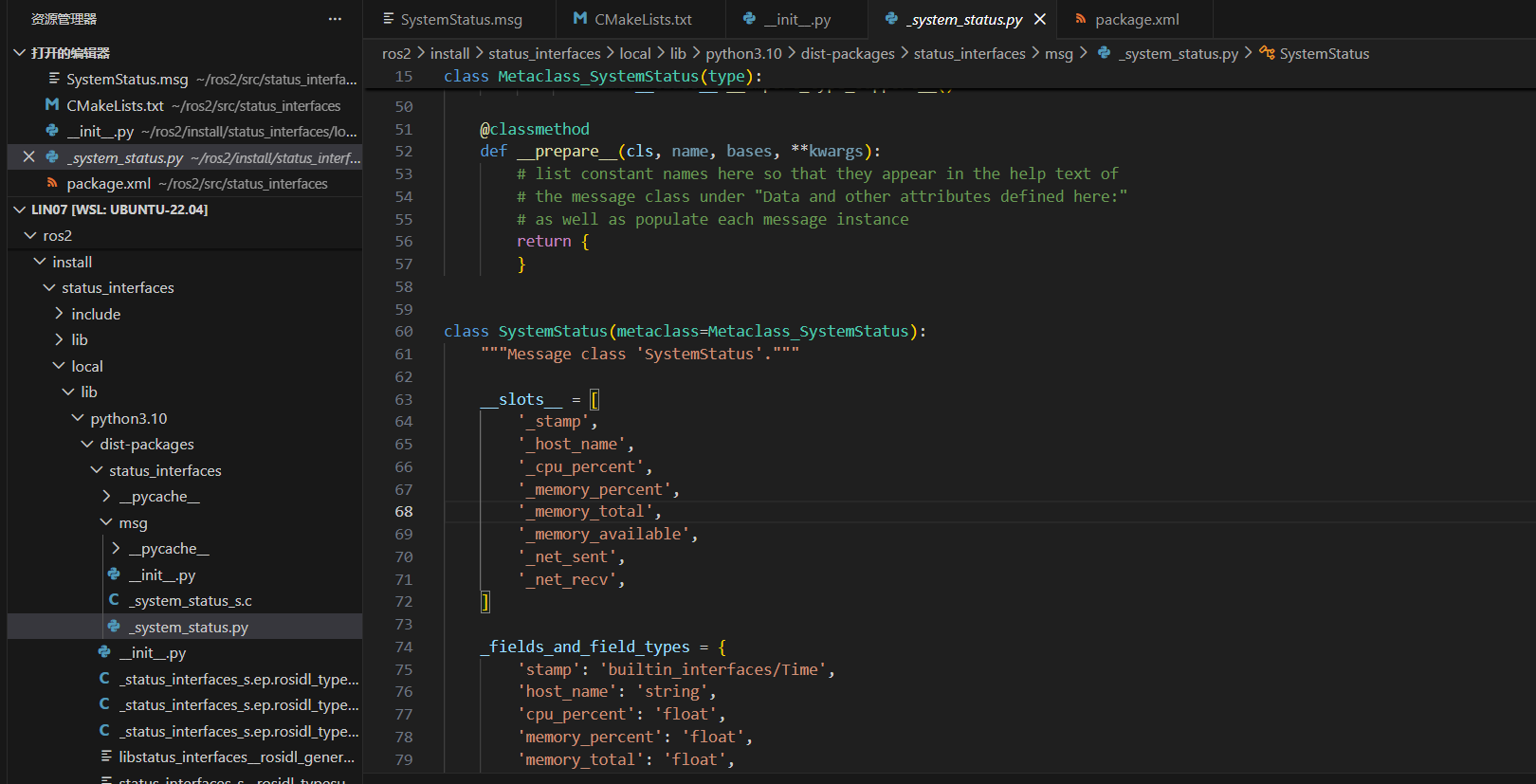
这样我们就可以在代码中使用这个消息接口了
先更改一下环境变量
source install/setup.bash再查看一下消息接口数据类型
ros2 interface show status_interfaces/msg/SystemStatus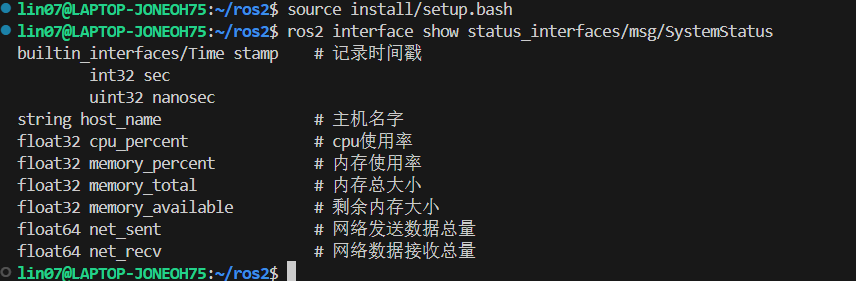
系统信息获取与发布
使用Python导入消息接口,只需要从功能包下面的msg模块导入消息接口就可以了
创建一个状态发布者的功能包(在src文件夹下)
ros2 pkg create status_publisher --build-type ament_python --dependencies rclpy status_interfaces --license Apache-2.0
# 功能包创建命令 功能包名 构建类型,Python语言实现 依赖声明 RP客户端库 自定义接口包 许可证指定新建一个代码文件
创建系统状态发布节点类
import rclpy # 导入ros2的Python客户端库
from status_interfaces.msg import SystemStatus # 从消息接口包中导入SystemStatus消息类型
from rclpy.node import Node # 导入Node类以创建ROS2节点
import psutil # 导入psutil库以获取系统状态信息
import platform # 导入platform库以获取系统平台信息
class SysStatusPub(Node):
def __init__(self, node_name):
super().__init__(node_name) # 父类初始化
self.status_publisher_ = self.create_publisher(SystemStatus, 'system_status', 10) # 创建话题发布者(消息类型, 话题名, 队列大小)
self.timer=self.create_timer(1.0, self.timer_callback) # 创建定时器(定时周期, 回调函数)
def timer_callback(self):
# 采集系统硬件状态
cpu_percent = psutil.cpu_percent()
memory_info = psutil.virtual_memory()
net_io_counters = psutil.net_io_counters()
# 创建SystemStatus消息实例并填充数据
msg = SystemStatus()
msg.stamp = self.get_clock().now().to_msg()
msg.host_name = platform.node()
msg.cpu_percent = cpu_percent
msg.memory_percent = memory_info.percent
msg.memory_total = memory_info.total
msg.memory_available = memory_info.available
msg.net_sent = net_io_counters.bytes_sent/1024/1024 # 获取发送数据总量(MB)
msg.net_recv = net_io_counters.bytes_recv/1024/1024 # 获取接收数据总量(MB)
self.get_logger().info(f'发布:{str(msg)}') # 日志输出
self.status_publisher_.publish(msg) # 发布消息
def main():
rclpy.init() # 初始化ROS2客户端库
node = SysStatusPub('sys_status_pub') # 创建SysStatusPub节点实例
rclpy.spin(node) # 进入节点的事件循环
rclpy.shutdown() # 关闭ROS2客户端库在setup.py中把它配置成可执行文件
现在可以回到状态空间目录(一定要记得啊,我开始就错误地在src下构建了)进行colcon build构建了
然后再使用source命令配置一下环境变量
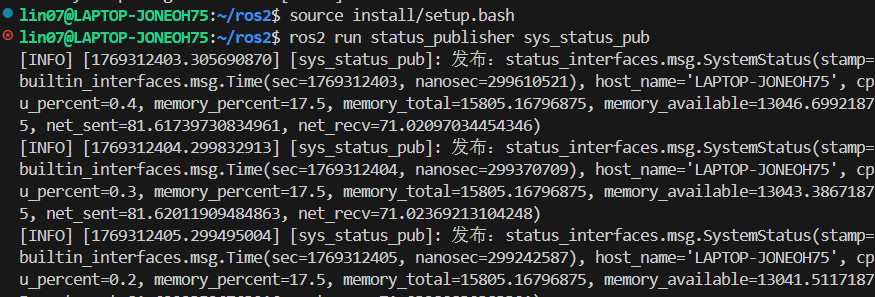
![]()
然后就可以运行了(下面就是发布的信息日志,红色是我打断了)
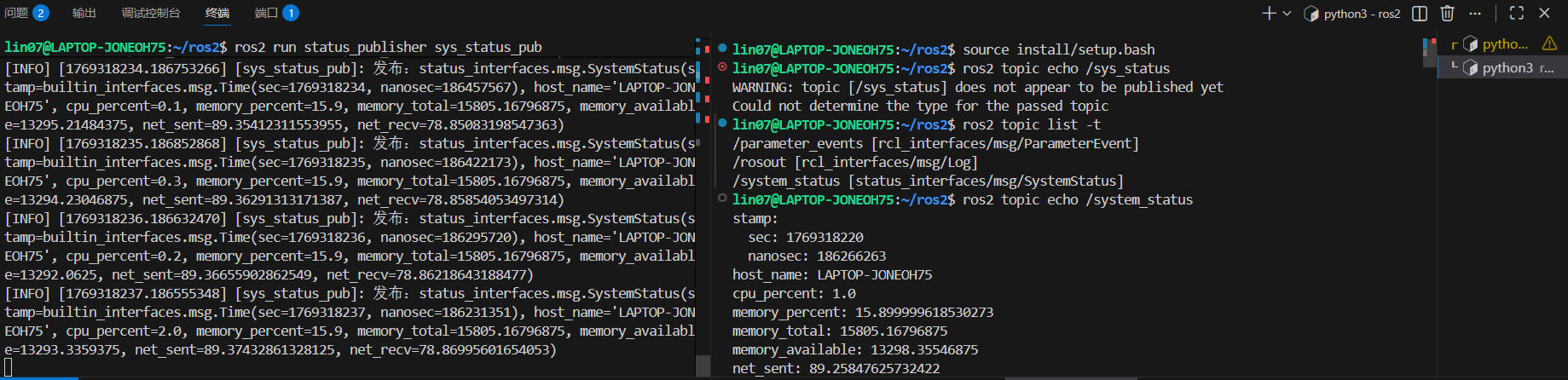
我们也可以再开一个终端,通过ros2 topic echo实时订阅并打印该话题发布的消息内容
但注意,新的终端也要通过source命令配置环境变量
话题名在SysStatusPub节点代码里,创建发布者里面定义的,可通过topic list查看
订阅数据并用Qt显示
完成界面显示
还是要在src目录下新建一个功能包(Cmake类型)
ros2 pkg create status_display --dependencies rclcpp status_interfaces --license Apache-2.0在功能包的src目录下新建一个系统状态显示的代码文件
// Qt图形界面核心库
#include <QApplication>
#include <QLabel>
#include <QString>
// ROS2C++核心库
#include <rclcpp/rclcpp.hpp>
// 自定义消息接口头文件
#include <status_interfaces/msg/system_status.hpp>
using SystemStatus = status_interfaces::msg::SystemStatus;
class SysStatusDisplay : public rclcpp::Node
{
public:
SysStatusDisplay() : Node("sys_status_display")
{
label_ = new QLabel();
// 创建ROS2订阅器(订阅话题名,队列大小,回调函数)
subscriber_ = this->create_subscription<SystemStatus>("system_status", 10, [&]
(const SystemStatus::SharedPtr msg)->void{
label_->setText(get_qstr_from_msg(msg));
});
label_->setText(get_qstr_from_msg(std::make_shared<SystemStatus>()));
label_->show();
}
QString get_qstr_from_msg(const SystemStatus::SharedPtr msg)
{
std::stringstream ss;
ss<<
"=========系统状态可视化显示工具=========\n"<<
"数据时间:\t"<<msg->stamp.sec<<"\ts\n"<<
"主机名字:\t"<<msg->host_name<<"\n"<<
"CPU使用率:\t"<<msg->cpu_percent<<"\t%\n"<<
"内存使用率:\t"<<msg->memory_percent<<"\t%\n"<<
"内存总大小:\t"<<msg->memory_total<<"\tMB\n"<<
"剩余有效内存:\t"<<msg->memory_available<<"\tMB\n"<<
"网络发送量:\t"<<msg->net_sent<<"\tMB\n"<<
"网络接收量:\t"<<msg->net_recv<<"\tMB\n"<<
"========================================";
return QString::fromStdString(ss.str());
}
private:
rclcpp::Subscription<SystemStatus>::SharedPtr subscriber_;
QLabel* label_;
};
int main(int argc, char** argv)
{
rclcpp::init(argc, argv);
QApplication app(argc, argv);
auto node = std::make_shared<SysStatusDisplay>();
// ROS2的spin(事件循环)和Qt的exec(应用循环)均为阻塞式运行,使用多线程
std::thread spin_thread([&](){
rclcpp::spin(node);
});
spin_thread.detach(); // 子线程分离
app.exec();
rclcpp::shutdown();
return 0;
}在CMakeLists.txt中添加编译配置,target_link_libraries()是CMake库链接的核心命令,ament_target_dependencies是ROS2库依赖的命令
find_package(Qt5 REQUIRED COMPONENTS Widgets) #定位Qt5的开发库
add_executable(sys_status_display src/sys_status_display.cpp) #添加可执行文件(生成的可执行文件名称,源文件路径)
target_link_libraries(sys_status_display Qt5::Widgets) #添加Widgets依赖库
ament_target_dependencies(sys_status_display rclcpp status_interfaces) #添加ROS2相关依赖
install(TARGETS sys_status_display DESTINATION lib/${PROJECT_NAME}) #安装可执行文件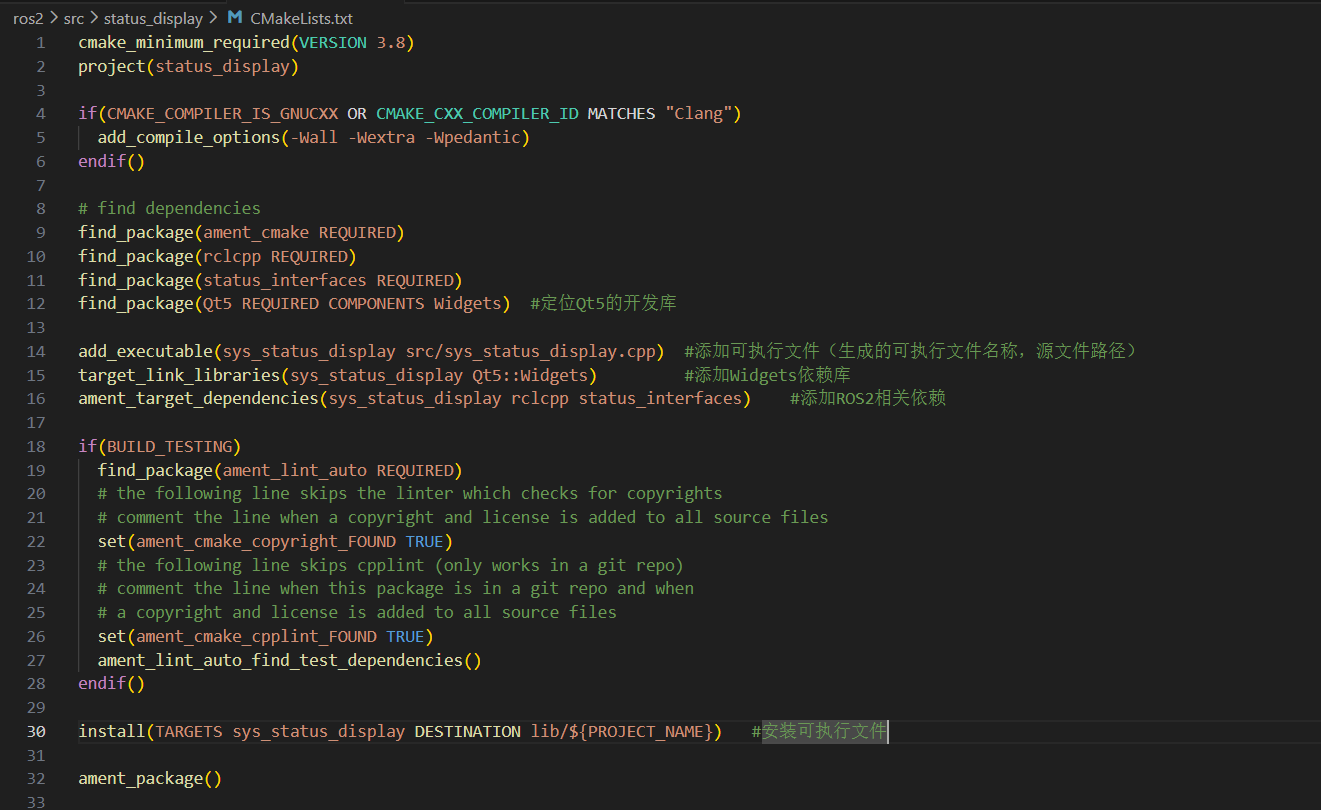
然后就可以回到工作空间使用colcon build构建了
配置环境变量后就可以run了
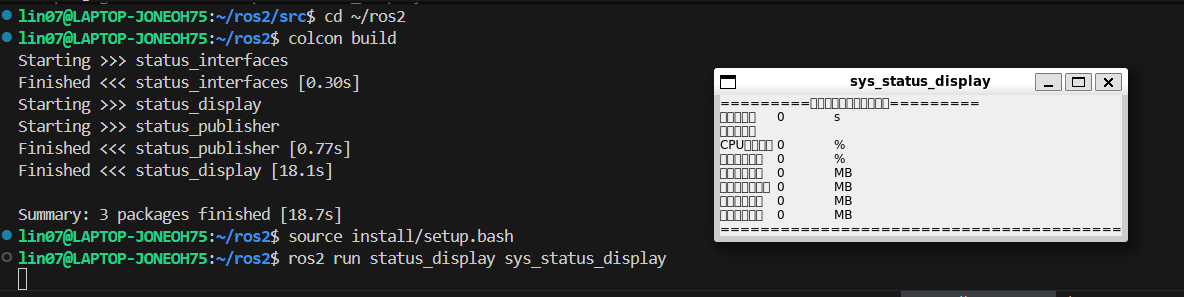
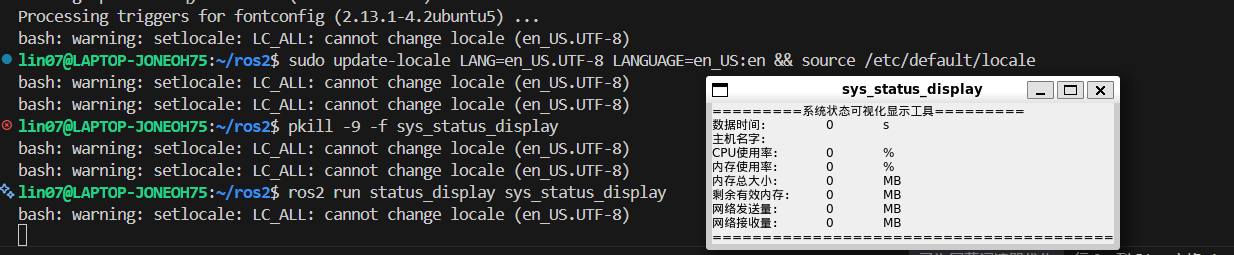
噢字体不能显示,需要安装Ubuntu 官方中文字体包
sudo apt update && sudo apt install fonts-wqy-microhei -y #安装中文包
sudo update-locale LANG=en_US.UTF-8 LANGUAGE=en_US:en && source /etc/default/locale #配置系统默认UTF-8编码然后就能正常显示了,没有数据是因为我们没有发布
现在开启两个终端(记得环境配置),一个发布,一个接收展示
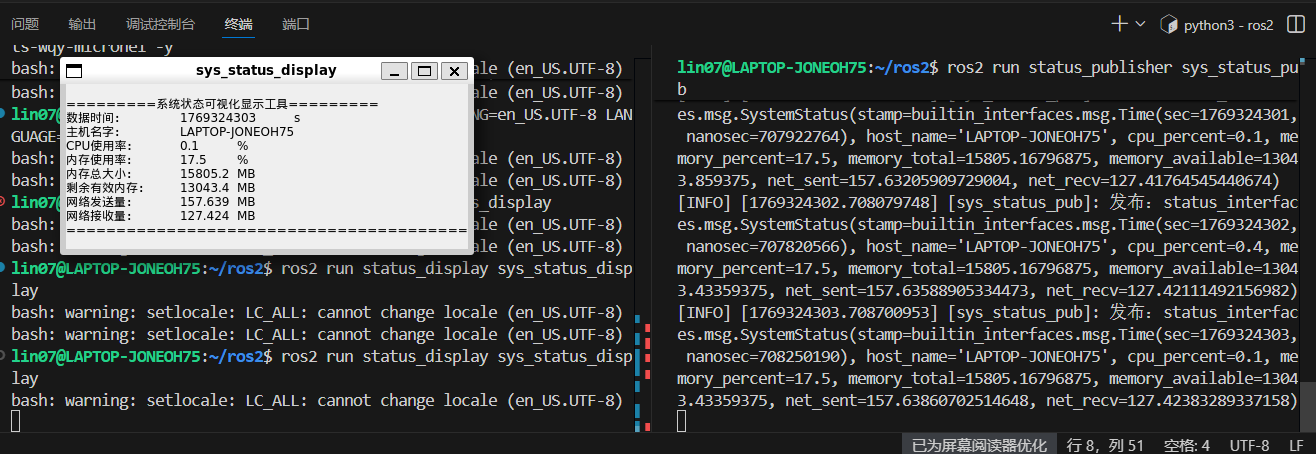
完成
服务与参数
它们都是话题的变种
服务
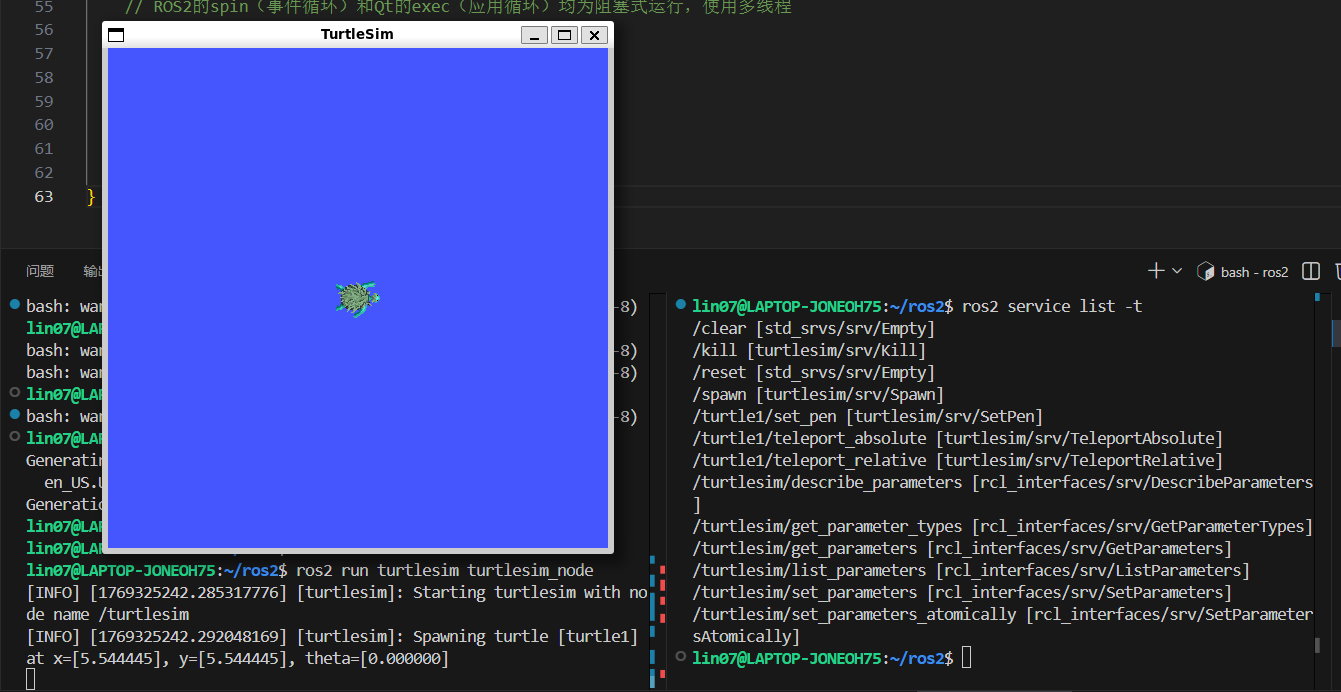
我们先打开一个小海龟模拟器,再打开一个终端通过ros2 service list -t命令查看一下当前系统中所有可用服务及对应的服务类型(接口类型)
使用ros2 interface show命令看一下服务的接口
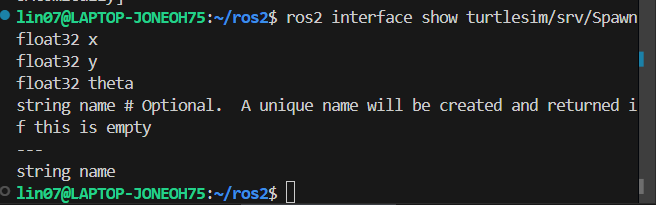
“---”上面部分是请求部分,下面是返回部分。
- 客户端调用服务时,必须按上半部分请求结构填充数据并发送;
- 服务端处理请求后,会按下半部分响应结构封装结果并返回。
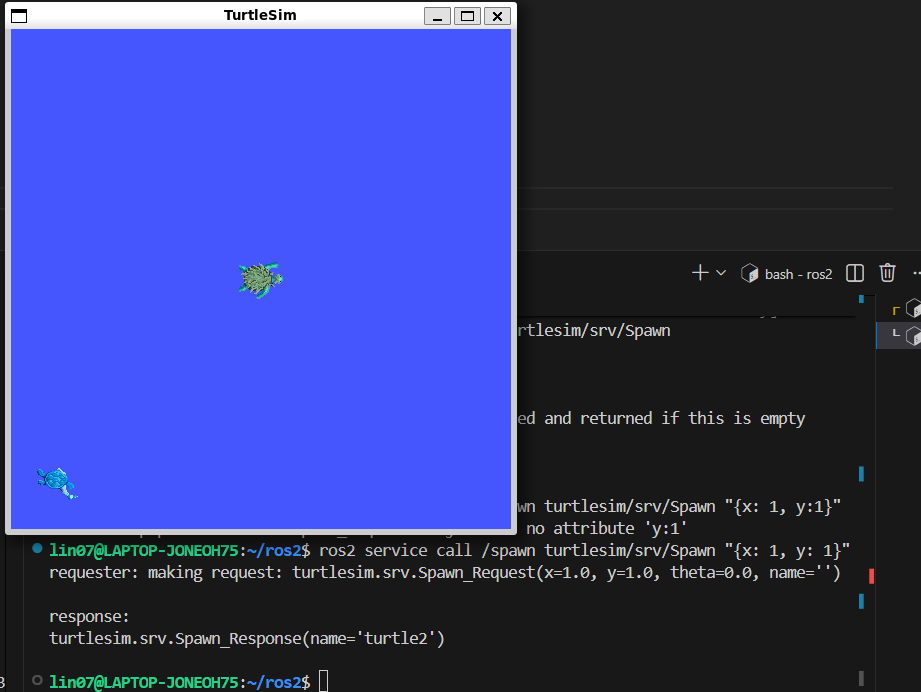
我们可以使用ros2 service call命令是在终端调用该服务(完整格式 ros2 service call 服务名称 服务接口类型 请求数据)
ros2 service call /spawn turtlesim/srv/Spawn "{x: 1, y: 1}" #theta没写默认为0可以看到,在(1,1)位置又多了一只小海龟
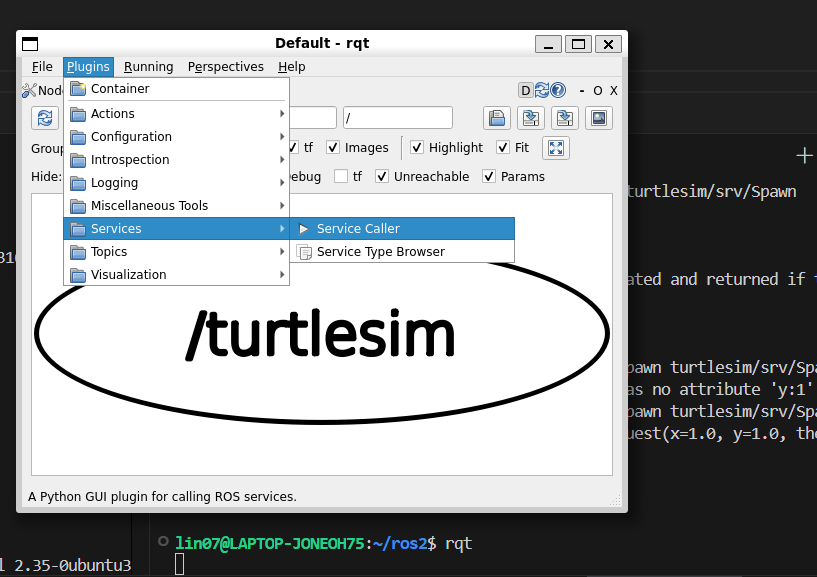
也可以使用可视化工具rqt进行请求
选择/spawn服务
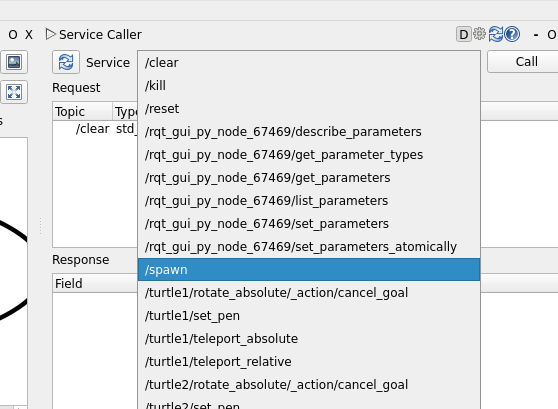
Request是请求部分,可以填写数据
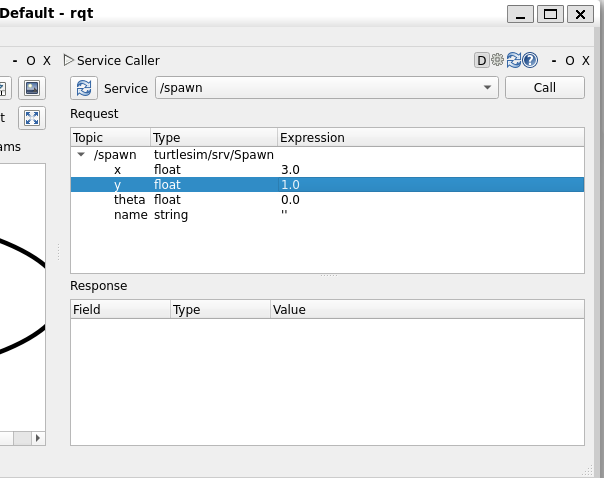
填写完后点击右上角的“Call”
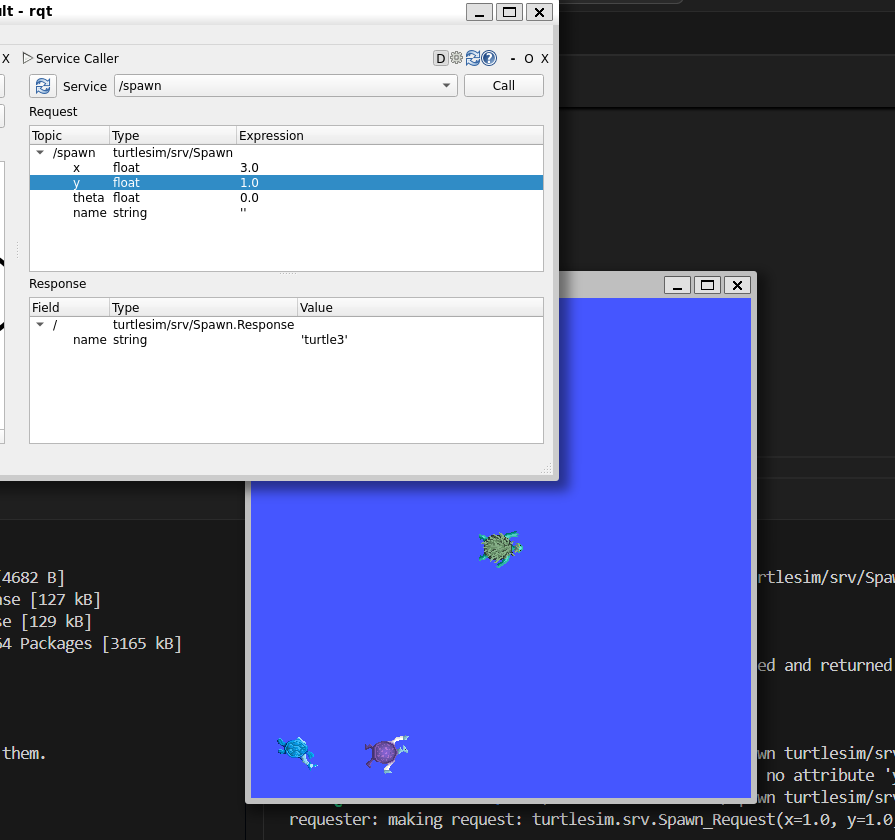
可以看到在(3,1)位置多了一只小海龟,并且有响应值返回(它的名字是turtle3)
基于服务的参数通信
参数是节点的“配置项”,节点对参数的所有操作,底层都是通过服务通信来完成的
还是打开一个小海龟模拟器,然后查看一下参数相关的服务列表
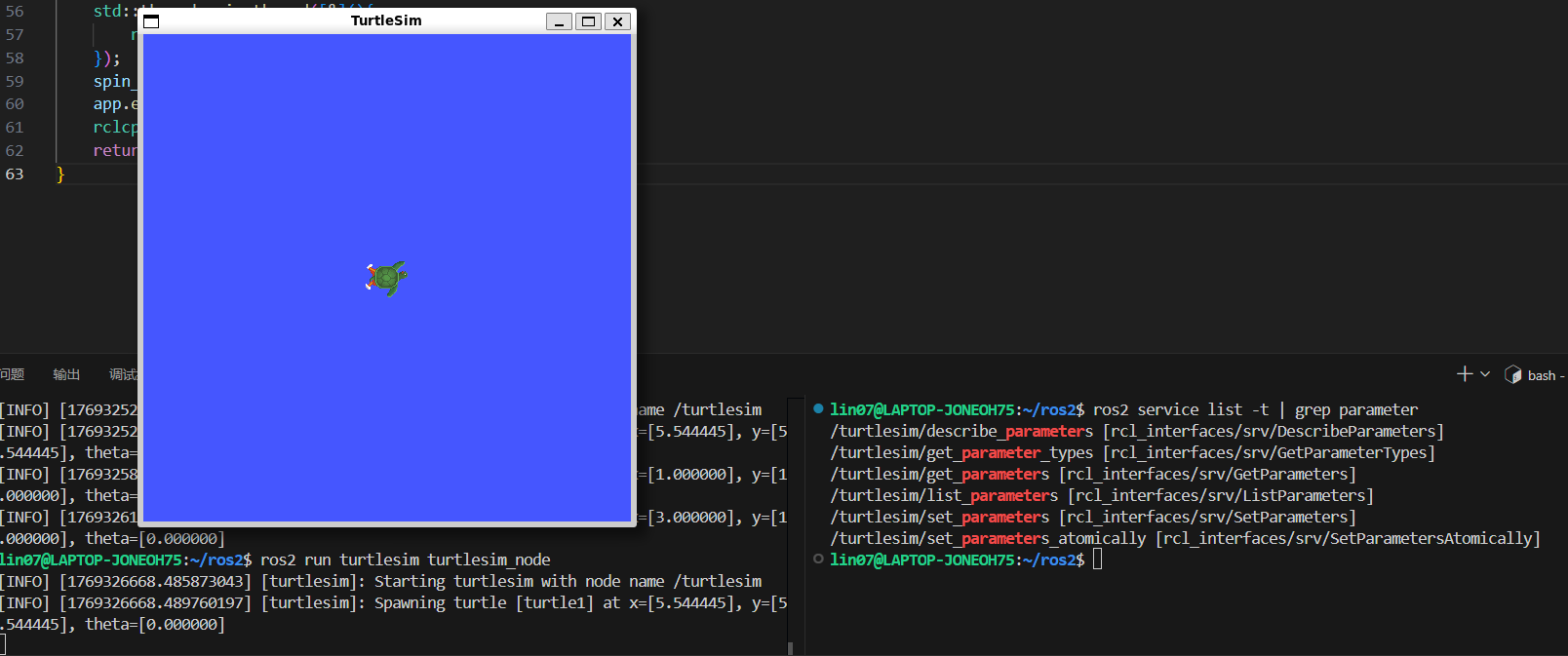
直接使用服务的方式调用这些接口去获取参数、设置参数比较麻烦,要写一大堆代码,所以ROS2中有一套参数相关的工具和库供我们使用
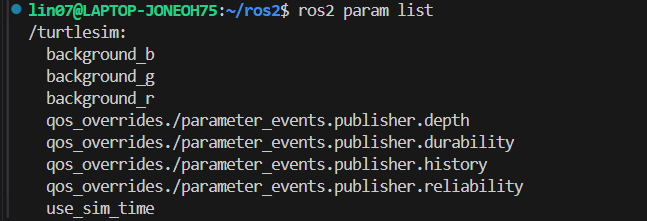
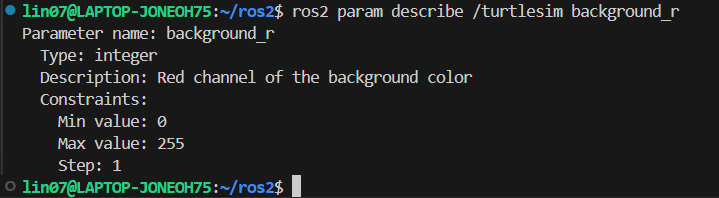
通过ros2 param list命令可以查看当前系统所有可用参数列表,然后可以使用“ros2 param describe+节点+参数”命令查看参数的描述
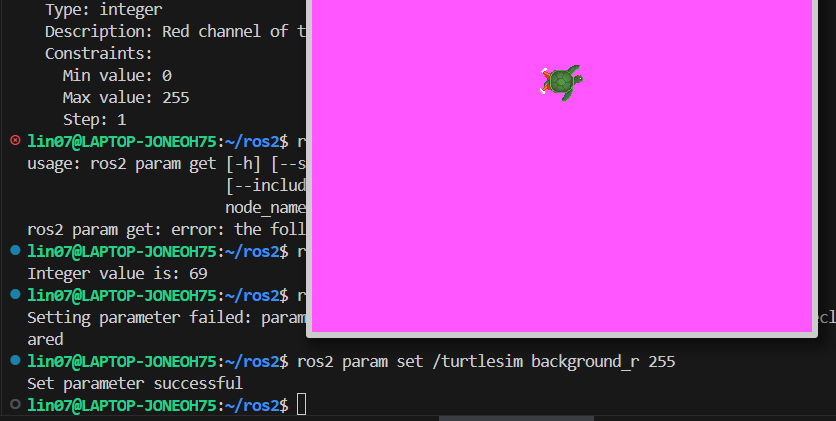
通过“ros2 param get+节点+参数”命令就可用获得当前参数的值

通过“ros2 param set+节点名+参数名”就可以修改参数的值
如果有多个参数需要配置,可使用文件来配置参数
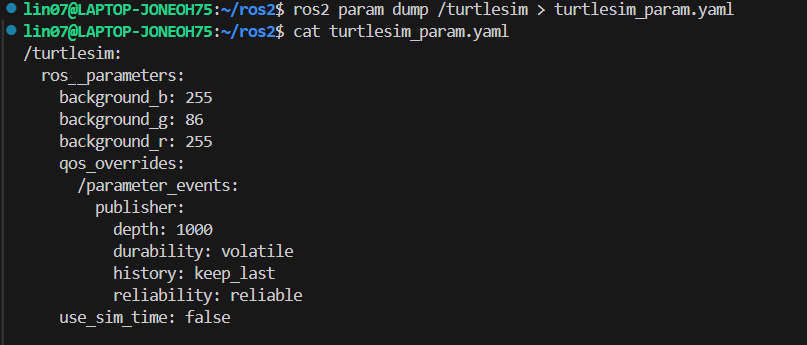
首先需要将某个节点的配置文件导出为一个yaml格式的文件
ros2 param dump /turtlesim > turtlesim_param.yaml然后可以直接打开,也可以使用cat命令查看文件
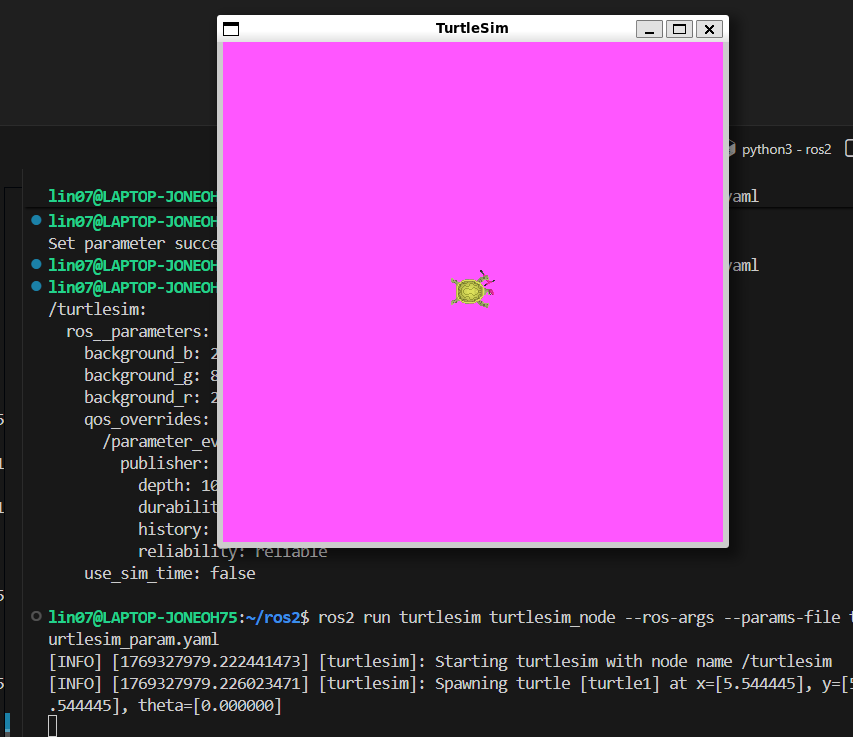
将参数配置保存后,下次运行节点时可以直接调用这个参数应用到节点上
将之前的小海龟模拟器关闭,使用如下命令调用参数并启动一个海龟模拟器
ros2 run turtlesim turtlesim_node --ros-args --params-file turtlesim_param.yaml可以看到,我们启动的海归模拟器就是粉色背景的
rqt里面也有和参数相关的一些工具
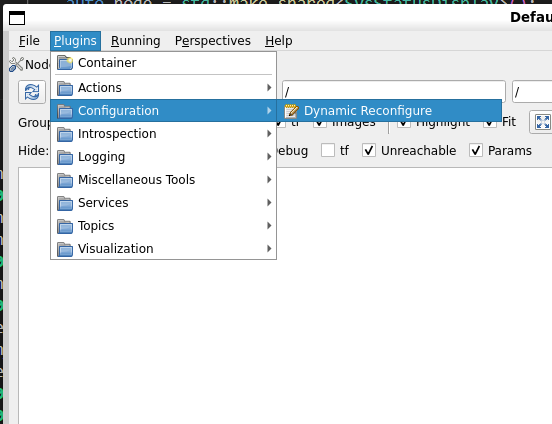
选中turtlesim
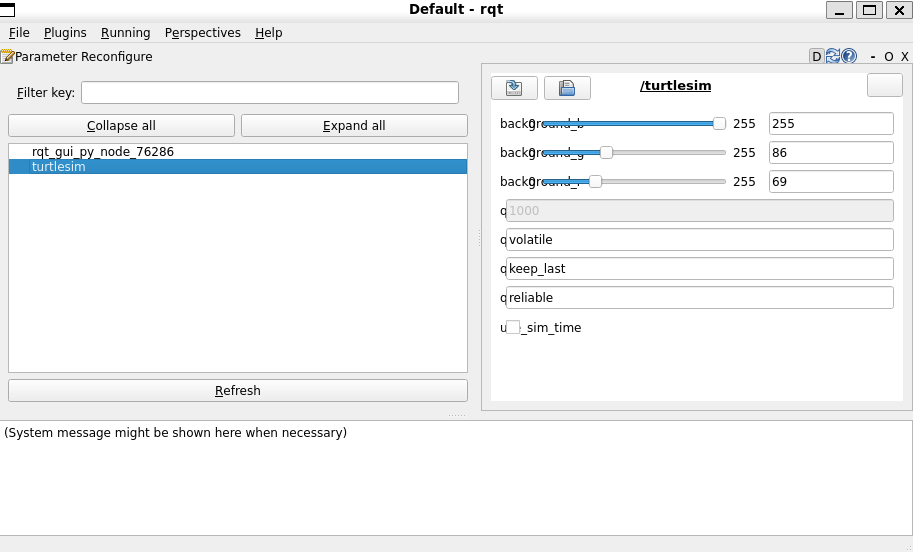
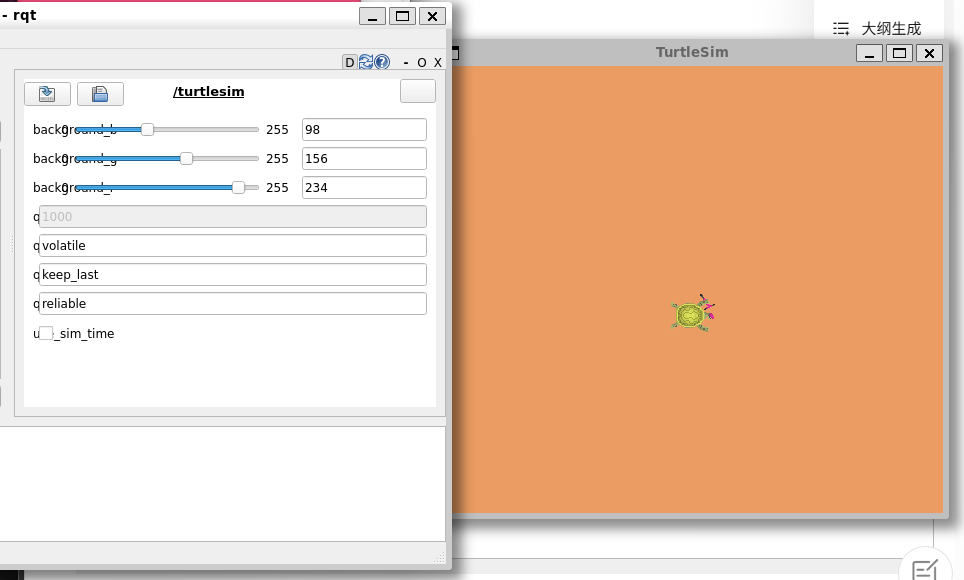
就可以进行动态参数配置
服务通信实践
需求:创建一个人脸检测服务,提供图像,返回人脸数量、位置信息
1.python中的yolo、face_rcoginition库都可以用来人脸识别。2.一方提供图像,一方返回相应,那就是服务通信。3.没有合适消息接口,自定义消息接口
自定义服务接口
服务接口分为请求部分和相应部分,中间用“---”分隔
还是先创建一个工作空间,创建src文件夹,在src文件夹中创建一个消息接口功能包(CMake类型)
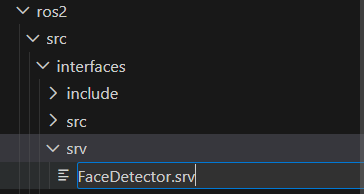
ros2 pkg create interfaces --dependencies sensor_msgs rosidl_default_generators --license Apache-2.0在功能包下新建一个srv文件夹(ROS2用固定的文件夹名称区分不同类型的通信数据接口,msg文件夹专门存放话题使用的消息接口文件,srv文件夹专门存放服务使用的消息接口文件)
在srv文件夹中新建一个FaceDetector.srv文件
定义消息接口
sensor_msgs/Image image # 人脸图像
---
int16 number
float32 use_time
int32[] top
int32[] right
int32[] bottom
int32[] left然后再配置一下CMakeLists.txt,添加消息接口
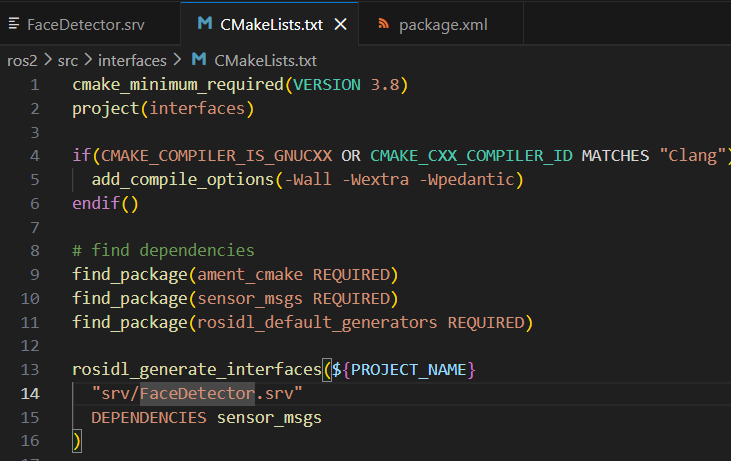
还要在package.xml中声明该消息接口功能包(第11行)
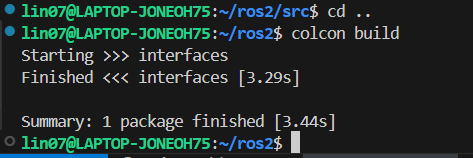
然后回到工作空间colcon build构建
使用Python进行人脸检测
我们使用python的face_recoginition库进行人脸检测,先安装一下该库
pip install face_recognition -i https://pypi.tuna.tsinghua.edu.cn/simple --trusted-host pypi.tuna.tsinghua.edu.cn然后在src文件夹下创建一个人脸检测的功能包
ros2 pkg create python_service --build-type ament_python --dependencies pclpy interfaces --license Apache-2.0然后准备一张人脸图片(不能是.webp格式),放到功能包的resource目录下

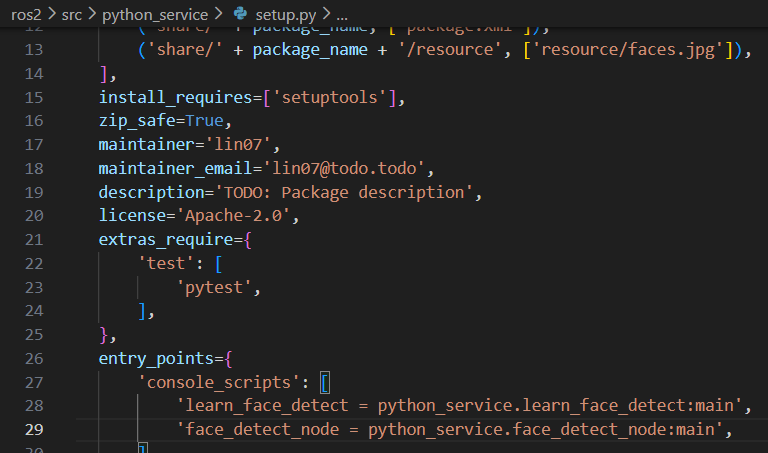
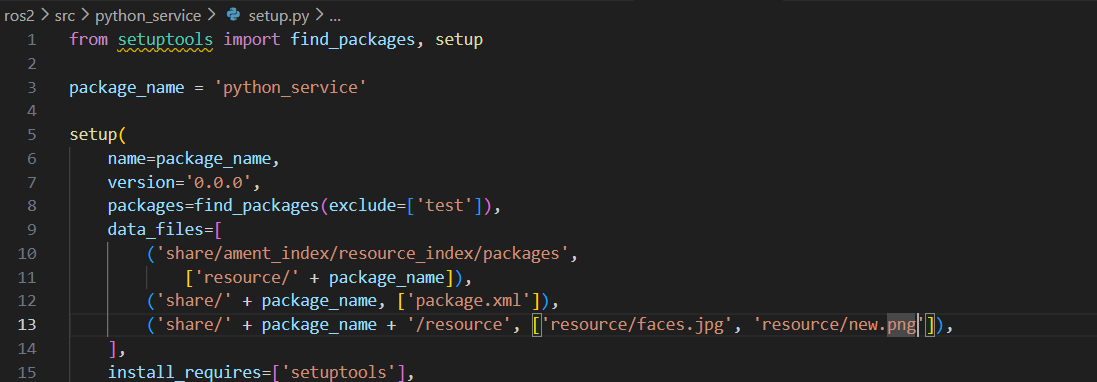
colcon build构建时仅会自动处理源码和setup.py中data_files字段声明的文件/目录,所以我们要在setup.py中配置该照片资源(把resource目录下的faces.webp文件拷贝到install目录下的share下的package_name下的resource目录中)
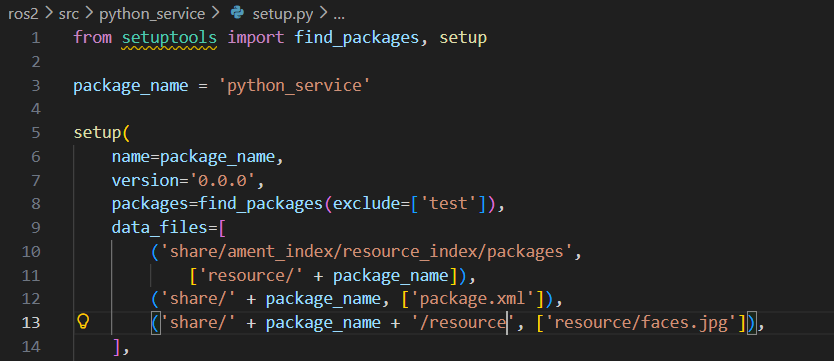
然后现在来编写人脸识别的代码,在功能包的python_service目录下创建learn_face_detect.py文件
import face_recognition
import cv2
from ament_index_python.packages import get_package_share_directory #获取功能包share目录绝对路径
def main():
# 获取图片的真实路径
default_image_path = get_package_share_directory('python_service') + '/resource/faces.jpg'
# 使用cv2加载图片
image = cv2.imread(default_image_path)
# 使用face_recognition检测人脸位置
face_loctions = face_recognition.face_locations(image, number_of_times_to_upsample=1, model="hog")
# 在图片上绘制人脸位置矩形框
for top, right, bottom, left in face_loctions:
cv2.rectangle(image, (left, top), (right, bottom), (255, 0, 0), 4)
# 显示图片
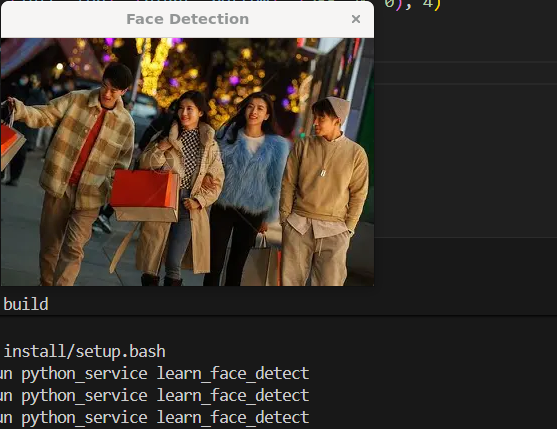
cv2.imshow("Face Detection", image)
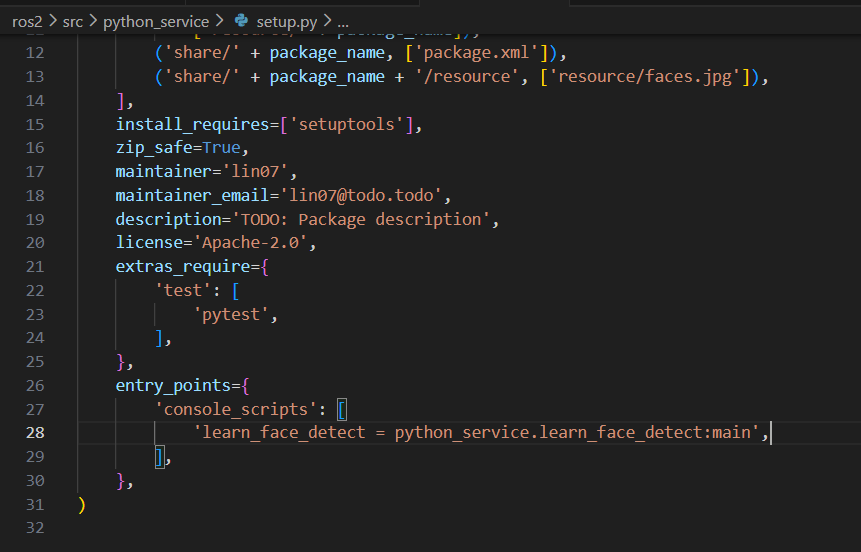
cv2.waitKey(0)然后在setup.py里声明可执行文件
在工作空间使用colcon build构建
然后配置一下环境变量,运行可执行文件
![]()
能正常显示图片,但是没检测出来(这是模型的问题了,苯人现在只注重项目流程,就不重新找图片什么的了)
人脸检测服务实现
ROS2里的图片格式(sensor_msgs里的Image格式)和OpenCV里的图片格式不一样,我们需要使用CV BRIGE库进行转换。
编写服务端节点,接收请求Request,调用face_recoginition识别,处理识别结果合成Response返回
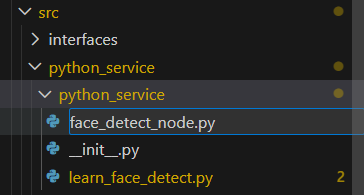
在python_service功能包的python_service目录下新建face_detect_node.py
import rclpy
from rclpy.node import Node
from interfaces.srv import FaceDetector
import face_recognition
import cv2
from ament_index_python.packages import get_package_share_directory
from cv_bridge import CvBridge
import time
class FaceDetectNode(Node):
def __init__(self):
super().__init__('face_detect_node') # 初始化父类
self.services_ = self.create_service(FaceDetector, 'face_detect', self.detect_face_callback) # 创建ROS2服务端(服务接口类型,服务名,回调函数)
self.bridge = CvBridge()
self.number_of_times_to_upsample = 1
self.model = "hog"
self.default_image_path = get_package_share_directory('python_service') + '/resource/faces.jpg'
def detect_face_callback(self, request, response):
if request.image.data:
cv_image = self.bridge.imgmsg_to_cv2(request.image)
else:
cv_image = cv2.imread(self.default_image_path)
self.get_logger().info('No image data received, using default image.')
start_time = time.time()
self.get_logger().info('Starting face detection...')
face_locations = face_recognition.face_locations(cv_image, number_of_times_to_upsample=self.number_of_times_to_upsample, model=self.model)
# 构造响应数据,返回给客户端
response.use_time = time.time() - start_time
response.number = len(face_locations)
for top, right, bottom, left in face_locations:
response.top.append(top)
response.right.append(right)
response.bottom.append(bottom)
response.left.append(left)
return response # 必须返回response
def main():
rclpy.init()
node = FaceDetectNode()
rclpy.spin(node)
rclpy.shutdown()在setup.py中配置可执行文件
然后在工作空间colcon build构建,配置环境,运行服务
打开一个新的终端,配置环境,使用“ros2 service call 服务名 接口类型 请求数据”命令调用该服务
ros2 service call /face_detect interfaces/srv/FaceDetector "{}" #请求数据为空加载默认图片因为那张图片检测不出来,所以都为0

人脸检测客户端实现
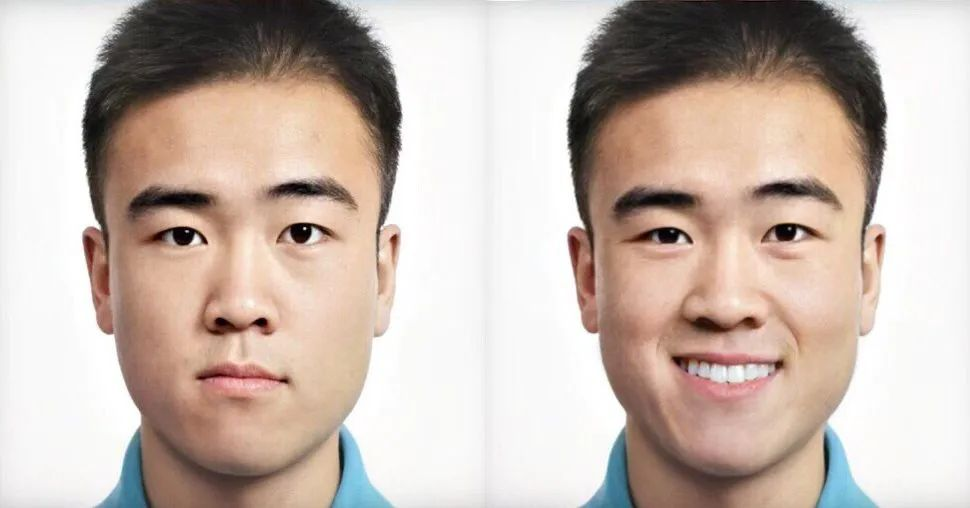
我换了一张默认人脸图片,不然还是太不爽了(这个可以检测到)。然后还需要准备一张图片,作为客户端发送的请求图片

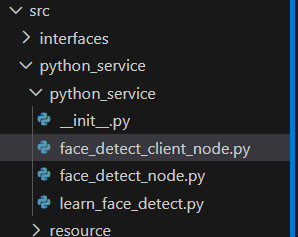
文件结构如下图
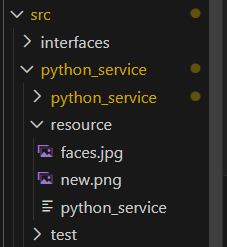
然后在setup.py中配置这张图片,直接在拷贝列表里添加一下就行了
在python_service功能包的python_service代码文件夹下新建一个python_detect_client_node.py
import rclpy
from rclpy.node import Node
from interfaces.srv import FaceDetector
import cv2
from ament_index_python.packages import get_package_share_directory
from cv_bridge import CvBridge # ROS2和OpenCV的图片格式转换工具
import time
class FaceDetectClientNode(Node):
def __init__(self):
super().__init__('face_detect_client_node')
self.bridge = CvBridge()
self.default_image_path = get_package_share_directory('python_service') + '/resource/new.png'
self.get_logger().info('人脸检测客户端已启动!')
self.client = self.create_client(FaceDetector,'face_detect') #创建客户端,绑定名为face_detect的服务
self.image=cv2.imread(self.default_image_path)
def send_request(self):
# 判断服务端是否在线
while self.client.wait_for_service(timeout_sec=1.0) is False:
self.get_logger().info('等待服务端上线...')
# 构造Request
request = FaceDetector.Request()
request.image = self.bridge.cv2_to_imgmsg(self.image)
#发送请求并等待处理完成
future = self.client.call_async(request)
rclpy.spin_until_future_complete(self,future) # 在后台边检查是否有返回边接收返回
# 接收响应
response = future.result()
self.get_logger().info(f'接收到响应,共检测到{response.number}张人脸,耗时{response.use_time}s')
self.show_reponse(response)
def show_reponse(self,response):
for i in range(response.number):
top = response.top[i]
right = response.right[i]
bottom = response.bottom[i]
left = response.left[i]
cv2.rectangle(self.image,(left,top),(right,bottom),(255,0,0),4)
cv2.imshow("人脸检测结果", self.image)
cv2.waitKey(0)
def main():
rclpy.init()
node = FaceDetectClientNode()
node.send_request() # 调用发送请求函数
rclpy.spin(node)
rclpy.shutdown()在setup.py中配置可执行文件
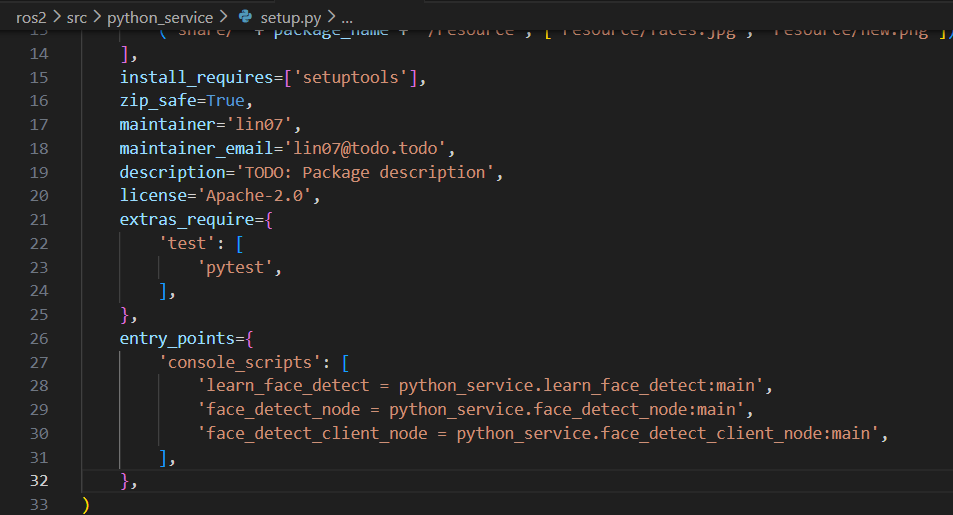
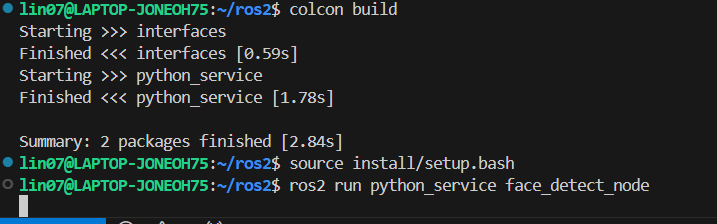
然后构建一下,source一下,先启动一下服务端
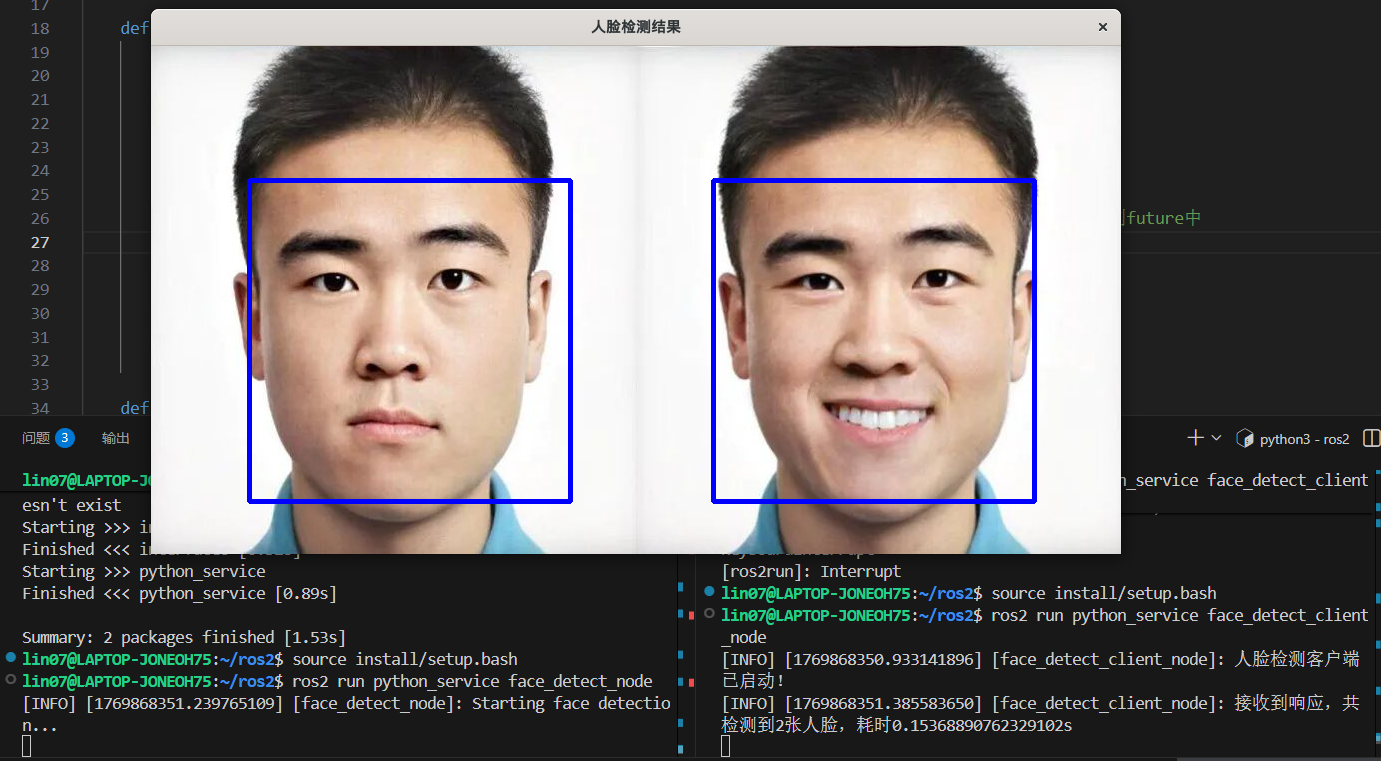
ros2 run python_service face_detect_node再打开一个终端,运行客户端,真的成功检测出来了!
参数实现
参数的声明与获取
# 参数的设置
self.declare_parameter('number_of_times_to_upsample',1) # 名字,值
self.declare_parameter('model','hog')
# 参数的获取
self.number_of_times_to_upsampleself.get_parameter('number_of_times_to_upsample').value
self.model = self.get_parameter('mddel').value订阅参数更新事件
参数更新是运行了setParameter服务,所以可以在服务通信的回调函数中设置参数回调
人脸检测服务改进代码如下
import rclpy
from rclpy.node import Node
from interfaces.srv import FaceDetector
import face_recognition
import cv2
from ament_index_python.packages import get_package_share_directory
from cv_bridge import CvBridge
import time
from rcl_interfaces.msg import SetParametersResult
class FaceDetectNode(Node):
def __init__(self):
super().__init__('face_detect_node') # 初始化父类
self.services_ = self.create_service(FaceDetector, 'face_detect', self.detect_face_callback) # 创建ROS2服务端(服务接口类型,服务名,回调函数)
self.bridge = CvBridge()
# 参数的设置
self.declare_parameter('number_of_times_to_upsample',1) # 名字,值
self.declare_parameter('model','hog')
# 参数的获取
self.number_of_times_to_upsample = self.get_parameter('number_of_times_to_upsample').value
self.model = self.get_parameter('model').value
self.default_image_path = get_package_share_directory('python_service') + '/resource/faces.jpg'
self.add_on_set_parameters_callback(self.parameter_callback)
def parameter_callback(self,parameters):
for parameter in parameters:
self.get_logger().info(f'{parameter.name}->{parameter.value}')
if parameter.name == 'number_of_times_to_upsample':
self.number_of_times_to_upsample = parameter.value
if parameter.name == 'model':
self.model = parameter.value
return SetParametersResult(successful = True)
def detect_face_callback(self, request, response):
if request.image.data:
cv_image = self.bridge.imgmsg_to_cv2(request.image)
else:
cv_image = cv2.imread(self.default_image_path)
self.get_logger().info('No image data received, using default image.')
start_time = time.time()
self.get_logger().info('Starting face detection...')
face_locations = face_recognition.face_locations(cv_image, number_of_times_to_upsample=self.number_of_times_to_upsample, model=self.model)
# 构造响应数据,返回给客户端
response.use_time = time.time() - start_time
response.number = len(face_locations)
for top, right, bottom, left in face_locations:
response.top.append(top)
response.right.append(right)
response.bottom.append(bottom)
response.left.append(left)
return response # 必须返回response
def main():
rclpy.init()
node = FaceDetectNode()
rclpy.spin(node)
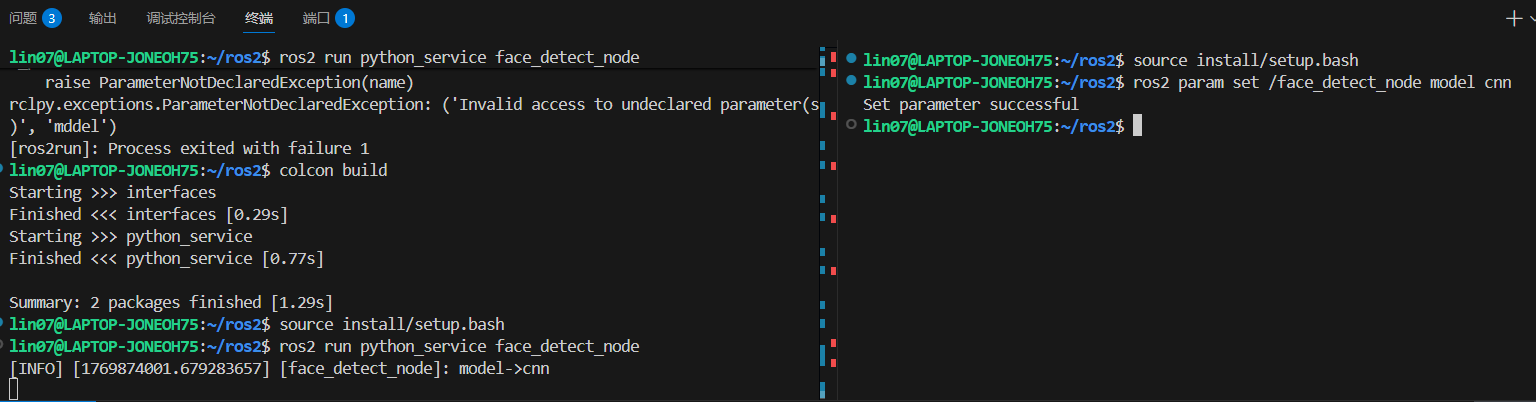
rclpy.shutdown()构建+配置,运行该服务
ros2 run python_service face_detect_node再打开另一个终端,设置一下参数
ros2 param set /face_detect_node model cnn可以看到左侧底部的消息提醒
使用launch启动脚本
使用lauch启动多节点(之前需要打开多个终端)
在功能包下新建一个launch文件夹,并在里面创建一个.launch.py文件
import launch
import launch_ros
# 产生launch描述(函数名固定)
def generate_launch_description():
action_node_face_detect_node = launch_ros.actions.Node(
package='python_service',
executable='face_detect_node',
output='log' # 输出日志
)
action_node_face_detect_client_node = launch_ros.actions.Node(
package='python_service',
executable='face_detect_client_node',
output='both' # 两者都输出
)
return launch.LaunchDescription([
action_node_face_detect_node,
action_node_face_detect_client_node,
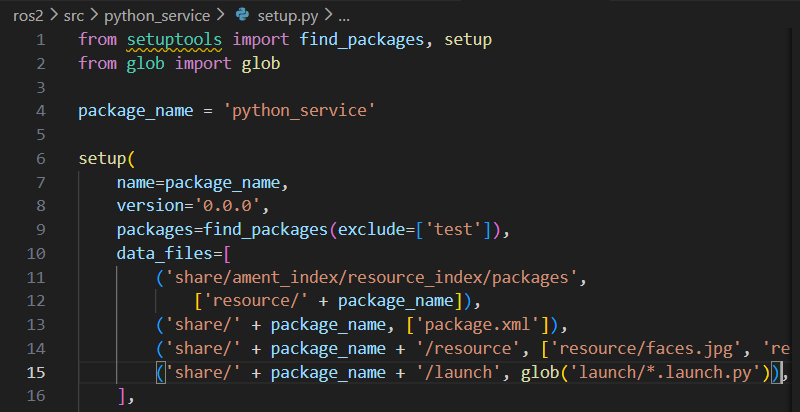
])在setup.py中配置一下,先导入glob库,添加路径(第15行)
在构建,配置环境,再launch启动
ros2 launch python_service demo.launch.py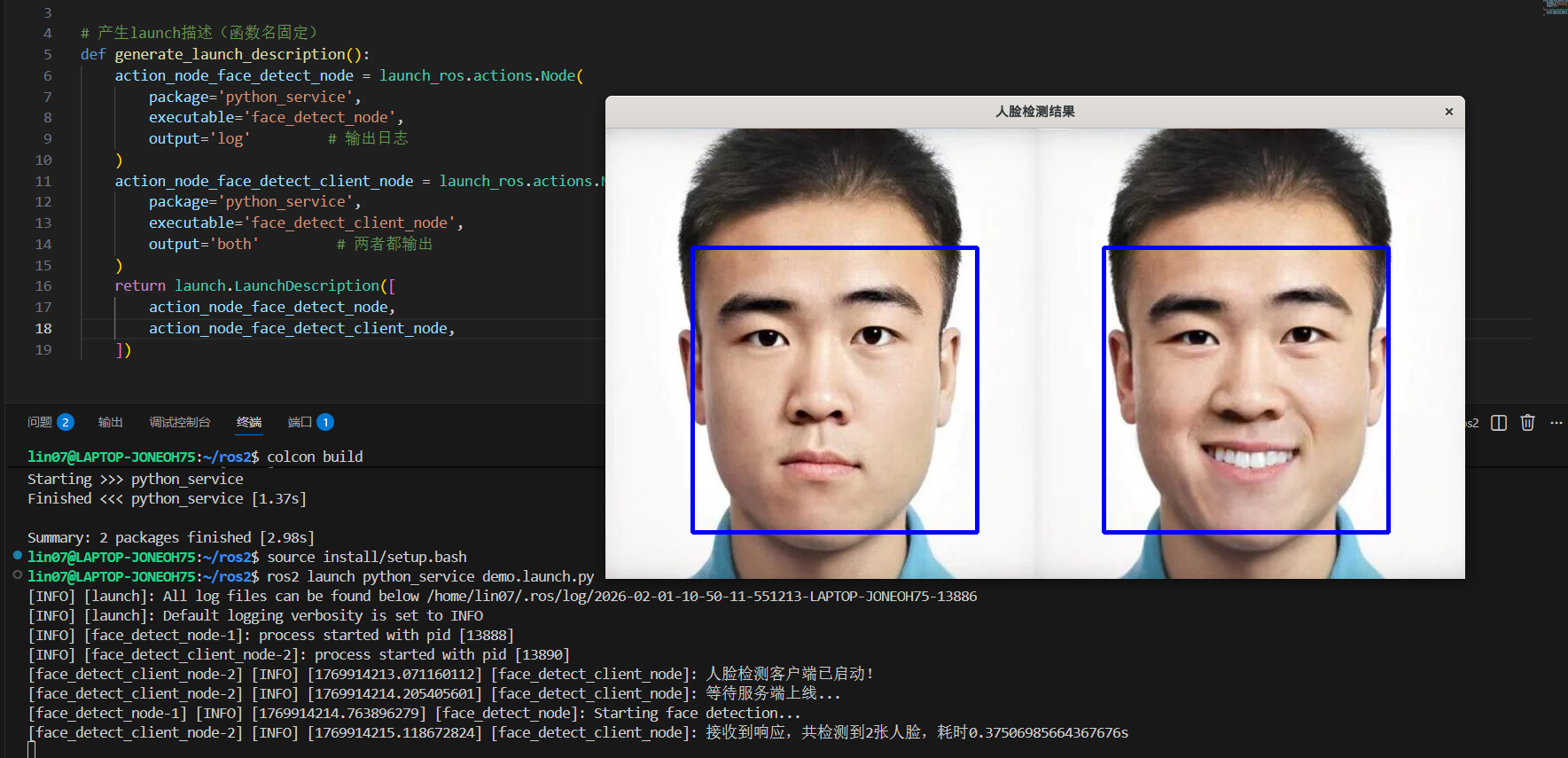
使用launch传递参数
import launch
import launch_ros
# 产生launch描述(函数名固定)
def generate_launch_description():
# 声明一个launch参数
action_declare_arg_background_g = launch.actions.DeclareLaunchArgument('launch_arg_bg',default_value='150')
# 把launch参数手动传递给某个节点
action_node_face_detect_node = launch_ros.actions.Node(
package='python_service',
executable='face_detect_node',
parameters=[{'background_g':launch.substitutions.LaunchConfiguration('launch_arg_bg',default='150')}],
output='log'
)
action_node_face_detect_client_node = launch_ros.actions.Node(
package='python_service',
executable='face_detect_client_node',
output='both'
)
return launch.LaunchDescription([
action_declare_arg_background_g,
action_node_face_detect_node,
action_node_face_detect_client_node,
])构建,配置,然后传参运行
ros2 launch python_service demo.launch.py launch_arg_bg:=0
# 参数名:=值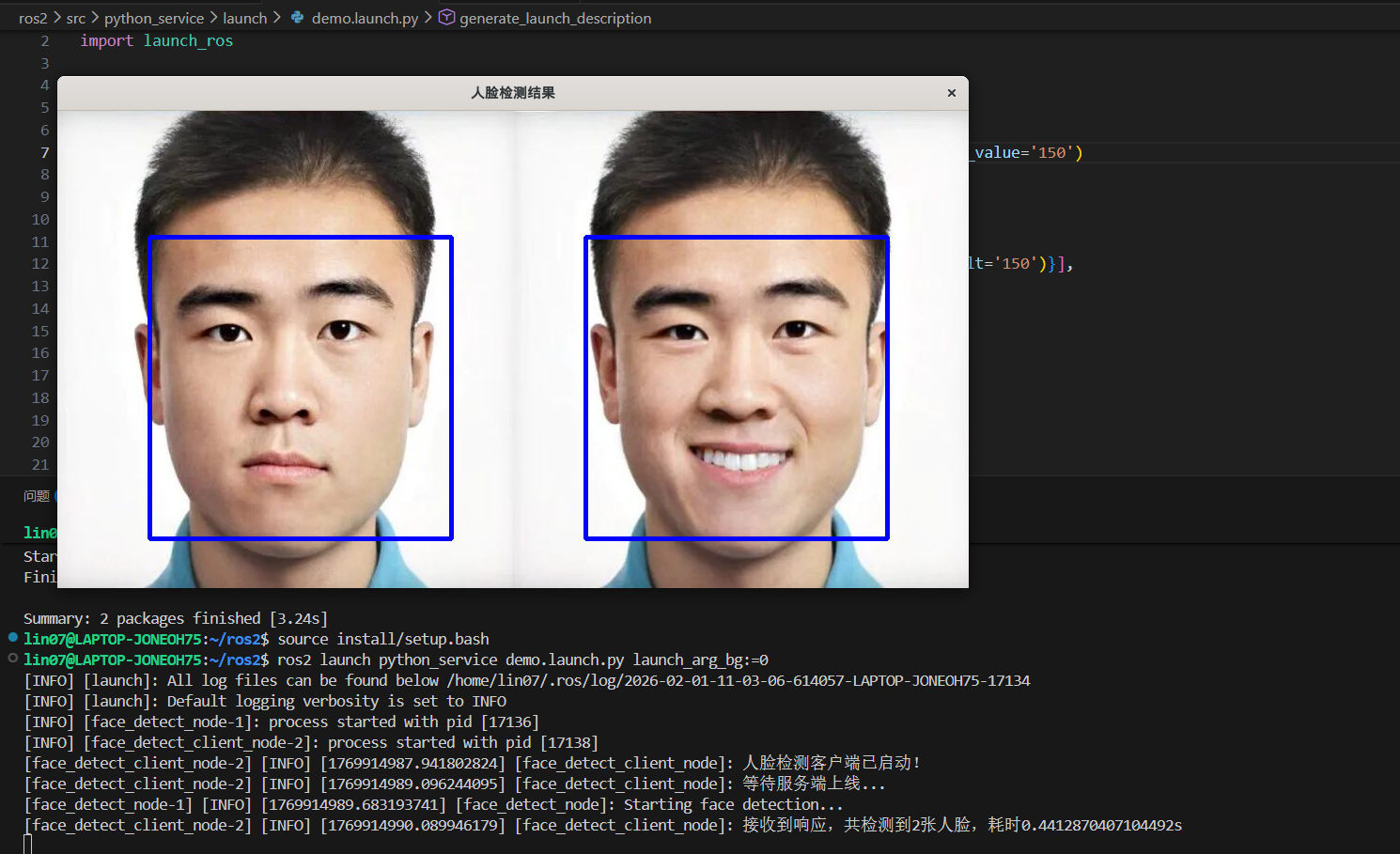
launch
Launch的三大组件是动作、条件和替换
动作:可以是节点、打印、终端指令,甚至是另一个launch文件
替换:使用launch的参数替换节点的参数值
条件:利用条件可以决定哪些动作启动

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐

 13
13 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)