光流+陀螺仪的“无磁”惯性导航轨迹记录仪
本文提出了一种基于STM32F103的低成本航位推算方案,用于室内无GPS且强磁干扰环境下的精准轨迹记录。系统融合PMW3901光流传感器(测量位移)和MPU6050陀螺仪(测量航向),配合VL6180测距传感器实现智能启停功能。文章详细介绍了硬件架构、传感器选型、核心算法(带旋转修正的航位推算)及代码实现,并针对常见开发问题提供解决方案。该方案有效解决了传统惯性导航在室内环境下的累积误差问题,适
【STM32硬核实战】基于光流+陀螺仪的“无磁”惯性导航轨迹记录仪
摘要:在室内无 GPS 且存在强磁干扰(无法使用磁力计)的环境下,如何精准记录物体的移动轨迹?本文提出了一种基于 STM32F103 的低成本航位推算(Dead Reckoning)方案。通过融合 PMW3901 光流传感器(测量位移)与 MPU6050 陀螺仪(测量航向),并配合 VL6180 ToF 测距(检测抬起状态),实现了在任意纹理平面上的二维轨迹重现。
关键词:STM32, 光流定位, PMW3901, MPU6050 DMP, 传感器融合, 航位推算
1. 项目背景与痛点
在机器人室内定位、空中鼠标或手持测量设备中,我们常面临以下痛点:
-
GPS 失效:室内无法接收卫星信号。
-
磁干扰严重:在电机、扬声器或铁磁性物质附近,电子罗盘(磁力计)的数据不可用。
-
累积误差:单纯使用加速度计进行二次积分求位移,几秒钟后漂移就会达到数米,完全不可用。
解决方案:采用类似“光电鼠标”的原理,利用光流传感器获取相对位移,但光流传感器无法感知自身的旋转。因此,我们需要引入高精度的陀螺仪来修正坐标系,从而在全局坐标系下还原出真实的运动轨迹。
2. 硬件架构与选型
系统采用模块化设计,主控为 STM32F103C8T6,挂载三个核心传感器。
| 模块名称 | 核心芯片 | 作用 | 通讯接口 | 选型理由 |
| 主控 | STM32F103C8T6 | 传感器数据读取与算法融合 | - | 资源丰富,支持浮点运算(软解) |
| 位移传感器 | PMW3901 | 测量 X/Y 轴的像素级位移 | SPI | 相比传统鼠标传感器,不需要特制鼠标垫,适应性强 |
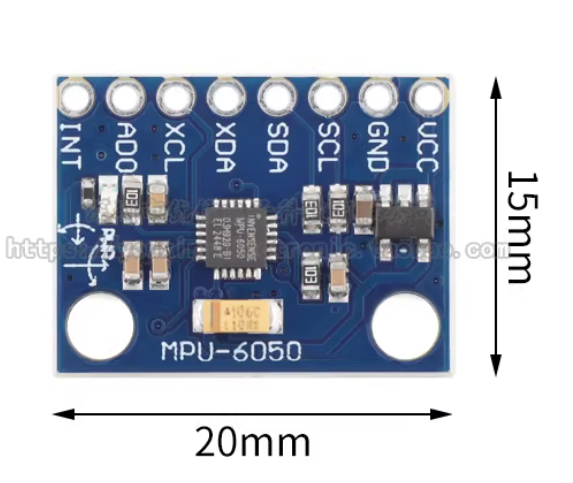
| 姿态传感器 | MPU6050 | 测量 Yaw (航向角) | I2C | 利用内置 DMP (数字运动处理器) 输出稳定的欧拉角 |
| 状态传感器 | VL6180 | 激光测距 (0-10cm) | I2C | 用于检测设备是否“离地”,实现智能暂停 |
| 显示交互 | 0.96寸 OLED | 实时显示坐标与状态 | I2C | 方便离线调试 |
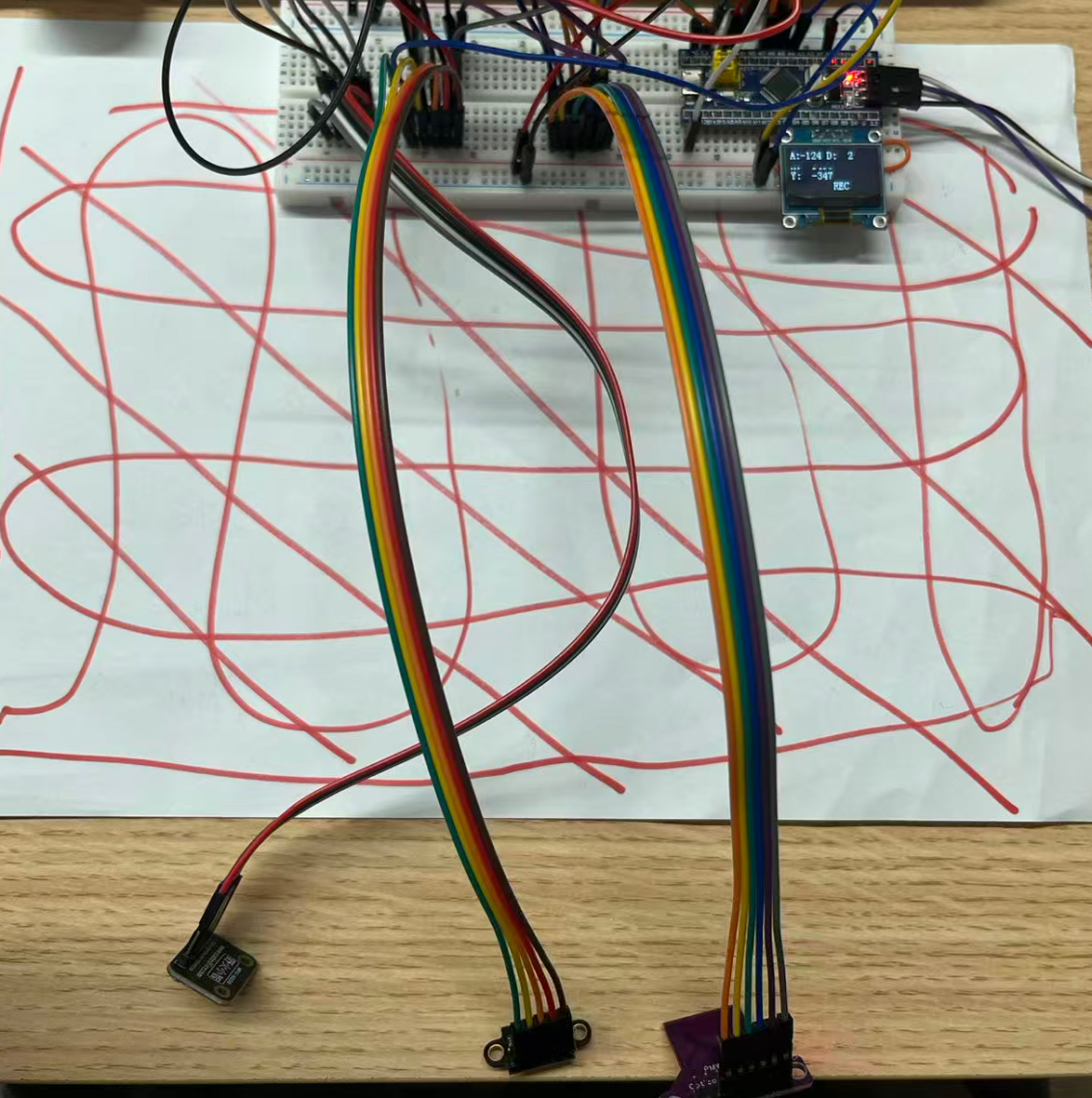
硬件连接示意 (Pin Map)
-
SPI 总线 (高速):PA4 (CS), PA5 (SCK), PA6 (MISO), PA7 (MOSI) -> PMW3901
-
I2C 总线 (模拟):PB10 (SCL), PB11 (SDA) -> MPU6050, VL6180, OLED
-
注意:由于挂载多个 I2C 设备,SCL 和 SDA 线必须接 4.7kΩ 上拉电阻,否则会导致通讯不稳定。
-


3. 核心传感器解析:PMW3901 光流模块
3.1 什么是光流(Optical Flow)?
在计算机视觉中,光流是指图像亮度模式在观察者视角下的视在运动。简单来说,PMW3901 就是一个每秒高速拍摄几百张照片的微型相机。
它内部集成了 DSP(数字信号处理)芯片,通过对比前后两帧图像纹理的移动,直接输出 X 轴和 Y 轴的像素位移量(Delta X, Delta Y)。这与光电鼠标的原理完全一致,但 PMW3901 专为无人机悬停设计,因此对不同表面的适应性更强(地砖、地毯、皮肤、混凝土均可)。
3.2 为什么选择 PMW3901?
-
体积小:适合手持设备。
-
接口简单:标准 4 线 SPI 接口。
-
无需信标:不需要像 UWB 那样布置基站,也不像 GPS 那样依赖卫星,完全自主定位。
-
数据特性:输出的是相对位移增量,这正是航位推算(Dead Reckoning)所需要的原材料。
3.3 驱动层代码实现
PMW3901 的驱动核心在于 SPI 时序的模拟 以及 寄存器的配置。
注意:PMW3901 对上电时序有严格要求,且内部有约 80 个“魔法寄存器”需要初始化(官方提供的 Performance Optimization 序列),否则性能极差。
A. 底层 SPI 通讯 (MySPI.c)
由于 PMW3901 对 SPI 时序要求较宽容,我们使用软件模拟 SPI 即可,方便移植。
// 软件模拟 SPI 交换字节
// Mode 0: CPOL=0, CPHA=0 (空闲低电平,第一个边沿采样)
uint8_t MySPI_SwapByte(uint8_t ByteSend)
{
uint8_t i, ByteReceive = 0x00;
for (i = 0; i < 8; i++)
{
// 1. 主机准备数据 (MOSI)
if (ByteSend & 0x80) GPIO_SetBits(GPIOA, GPIO_Pin_7); // MOSI
else GPIO_ResetBits(GPIOA, GPIO_Pin_7);
ByteSend <<= 1;
// 2. 拉高时钟 (SCK),从机采样
GPIO_SetBits(GPIOA, GPIO_Pin_5); // SCK High
// 3. 主机读取数据 (MISO)
if (GPIO_ReadInputDataBit(GPIOA, GPIO_Pin_6)) // MISO
ByteReceive |= (0x80 >> i);
// 4. 拉低时钟,准备下一位
GPIO_ResetBits(GPIOA, GPIO_Pin_5); // SCK Low
}
return ByteReceive;
}
B. 寄存器读写封装 (PMW3901.c)
PMW3901 规定:
-
写操作:地址最高位(MSB)为
1。 -
读操作:地址最高位(MSB)为
0。
// 写寄存器
void PMW3901_WriteReg(uint8_t RegAddress, uint8_t Data)
{
MySPI_Start(); // 拉低 CS
MySPI_SwapByte(RegAddress | 0x80); // 写操作标志位
MySPI_SwapByte(Data);
MySPI_Stop(); // 拉高 CS
Delay_us(20); // 必要的延时,防止指令粘连
}
// 读寄存器
uint8_t PMW3901_ReadReg(uint8_t RegAddress)
{
uint8_t Data;
MySPI_Start();
MySPI_SwapByte(RegAddress & 0x7F); // 读操作标志位
Data = MySPI_SwapByte(0xFF); // 发送空字节置换回数据
MySPI_Stop();
Delay_us(20);
return Data;
}
C. 获取运动数据 (核心函数)
这是主循环中调用的关键函数。我们需要读取 0x02 (Motion), 0x03 (Delta_XL) 到 0x06 (Delta_YH) 寄存器。
/**
* @brief 读取光流传感器的位移增量
* @param delta_x: 返回 X 轴位移 (指针)
* @param delta_y: 返回 Y 轴位移 (指针)
*/
void PMW3901_ReadMotion(int16_t *delta_x, int16_t *delta_y)
{
// 1. 读取 Motion 寄存器 (0x02) 判断是否有运动
// Bit 7: Motion Occurred (1=有运动, 0=无)
uint8_t motion = PMW3901_ReadReg(0x02);
if(motion & 0x80)
{
// 2. 连续读取低八位和高八位
// 注意:必须先读低位 (L),再读高位 (H),否则数据可能锁死
uint8_t xl = PMW3901_ReadReg(0x03);
uint8_t xh = PMW3901_ReadReg(0x04);
uint8_t yl = PMW3901_ReadReg(0x05);
uint8_t yh = PMW3901_ReadReg(0x06);
// 3. 拼接成 16位 有符号整型
*delta_x = (int16_t)((xh << 8) | xl);
*delta_y = (int16_t)((yh << 8) | yl);
}
else
{
*delta_x = 0;
*delta_y = 0;
}
}
3.4 光流数据应用的 3 个“坑”
在实际调试中,单纯跑通代码往往是不够的,你可能会遇到以下物理特性带来的问题:
1. 焦距与离地高度 (The Sweet Spot)
PMW3901 通常自带一个透镜。
-
现象:如果传感器紧贴着物体表面(距离 < 2mm),或者离得太远(> 10cm),画面会模糊,导致读数均为 0 或乱跳。
-
解决:确保传感器镜头距离被测表面 10mm ~ 40mm 之间。如果是手持设备,需要在结构上设计一个限位支架。
2. 纹理依赖 (Texture Dependency)
光流依赖“看”到的纹理移动。
-
现象:在纯白纸、镜面或玻璃上移动,数据不动。
-
解决:这在手持设备上通常不是问题(人的皮肤、衣服、木纹桌面的纹理都足够丰富)。但在测试时,请不要在光滑的白色桌面上测试,垫一张报纸效果最好。
3. 坐标系方向 (Orientation)
芯片安装的方向可能与你的定义不同。
-
现象:向前推设备,Y 轴数据却是负的,或者变成了 X 轴数据。
-
解决:
-
物理上:将芯片上的 Dot (原点标记) 对准设备车头。
-
软件上:通过简单的交换或取反来修正。
// 简单的坐标系修正示例 int16_t raw_x, raw_y; PMW3901_ReadMotion(&raw_x, &raw_y); // 假设安装旋转了90度 *final_dx = -raw_y; *final_dy = raw_x; -
(VL6180和MPU6050DMP的相关代码我之前都发过)
4. 核心算法原理:带旋转修正的航位推算
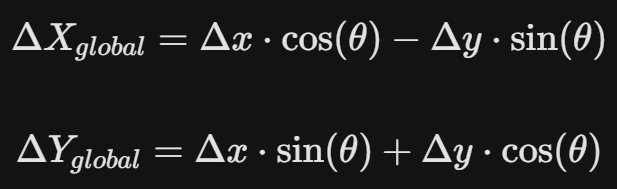
光流传感器输出的是机身坐标系下的位移 Delta x, Delta y。当设备发生旋转时,机身的“前方”不再是地图的“北方”。
我们需要利用陀螺仪测得的航向角 (Yaw),利用旋转矩阵将位移映射到全局坐标系。
4.1 数学模型

即:
4.2 智能启停逻辑 (Lift Detection)
利用 VL6180 测距传感器实现“提笔暂停”功能:
-
有效工作区:当距离 $< 30mm$ 时,认为设备贴合表面,正常积分坐标。
-
悬空区:当距离 $\ge 30mm$ 时,认为设备被拿起,锁定全局坐标,防止光流传感器在空中的噪声导致轨迹乱飞。
5. 关键代码实现
5.1 坐标融合算法 (Algorithm.c)
这是整个系统的核心数学逻辑。
#include <math.h>
#include "Algorithm.h"
// 全局位置变量
float Global_X = 0.0f;
float Global_Y = 0.0f;
// 比例尺系数:将光流的脉冲数转换为物理距离(mm)
// 该系数需要根据传感器安装高度进行实测标定
#define SCALE_FACTOR 0.15f
#define DEG_TO_RAD 0.01745329f // π/180
/**
* @brief 传感器融合更新位置
* @param flow_dx: 光流传感器 X 轴增量
* @param flow_dy: 光流传感器 Y 轴增量
* @param yaw_deg: 当前相对航向角 (度)
*/
void Fusion_Update_Position(int16_t flow_dx, int16_t flow_dy, float yaw_deg)
{
// 1. 角度转弧度
float rad = yaw_deg * DEG_TO_RAD;
float sin_val = sin(rad);
float cos_val = cos(rad);
// 2. 旋转矩阵变换 (机身系 -> 全局系)
// 注意:根据传感器安装方向,flow_dy 可能需要取反
float d_world_x = (float)flow_dx * cos_val - (float)flow_dy * sin_val;
float d_world_y = (float)flow_dx * sin_val + (float)flow_dy * cos_val;
// 3. 累加全局坐标
Global_X += d_world_x * SCALE_FACTOR;
Global_Y += d_world_y * SCALE_FACTOR;
}
5.2 主程序逻辑 (main.c)
主循环采用分时调度策略:优先保证传感器数据读取,降低屏幕刷新频率以减轻 I2C 总线压力。
int main(void)
{
// 硬件初始化
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
MyI2C_Init(); // 初始化模拟 I2C
OLED_Init();
PMW3901_Init();
// MPU6050 DMP 初始化 (注意:需增大 Stack Size)
OLED_ShowString(0, 0, "DMP Init...", OLED_8X16);
OLED_Update();
MPU6050_DMPInit();
// --- 零偏校准 (Zero Calibration) ---
// 上电后需保持静止,记录初始 Yaw 作为 0 度参考
OLED_ShowString(0, 0, "Calibrating...", OLED_8X16);
OLED_Update();
Delay_ms(3000); // 等待传感器稳定
if (MPU6050_ReadDMP(&Pitch, &Roll, &Yaw) == 0) {
Yaw_Offset = Yaw; // 记录初始偏移量
}
// 清空光流传感器积存的历史数据
int16_t flow_dx, flow_dy;
PMW3901_ReadMotion(&flow_dx, &flow_dy);
while(1)
{
// 1. 读取姿态 (DMP中断或轮询)
if (MPU6050_DataReady) {
MPU6050_ReadDMP(&Pitch, &Roll, &Yaw);
relative_yaw = Yaw - Yaw_Offset; // 获取相对角度
// 角度归一化 (-180 ~ +180)
if(relative_yaw > 180.0f) relative_yaw -= 360.0f;
if(relative_yaw < -180.0f) relative_yaw += 360.0f;
MPU6050_DataReady = 0;
}
// 2. 读取测距与光流 (采样周期约 20ms)
Delay_ms(20);
uint8_t distance = VL6180_Read_Range();
VL6180_Start_Range(); // 触发下一次测量
// 3. 轨迹记录判断
if (distance < 30) // 贴合表面
{
PMW3901_ReadMotion(&flow_dx, &flow_dy);
// 简单死区过滤,去除静止噪声
if (abs(flow_dx) > 1 || abs(flow_dy) > 1) {
Fusion_Update_Position(flow_dx, flow_dy, relative_yaw);
}
}
else {
// 悬空状态:只读不记,防止数据积压
PMW3901_ReadMotion(&flow_dx, &flow_dy);
}
// 4. 数据可视化 (降频刷新)
static uint8_t show_cnt = 0;
if(++show_cnt >= 10) { // 200ms 刷新一次
show_cnt = 0;
OLED_Printf(0, 0, "A:%4.0f D:%3d", relative_yaw, distance);
OLED_Printf(0, 16, "X:%6.0f", Global_X);
OLED_Printf(0, 32, "Y:%6.0f", Global_Y);
OLED_Update();
}
}
}
6. 开发避坑指南 (Debug Notes)
在复现该项目时,以下几个问题最为常见:
5.1 程序卡死在 DMPInit
-
现象:OLED 停留在初始化界面,无法进入主循环。
-
原因:STM32 标准库启动文件默认分配的栈空间 (
Stack_Size) 只有 0x400 (1KB),而 MPU6050 的 DMP 库初始化时需要较大的内存缓冲区,导致堆栈溢出 (Stack Overflow)。 -
解决:打开工程中的
startup_stm32f10x_md.s文件,将Stack_Size修改为 0x1000 (4KB),并在 Keil 设置中勾选 "Use MicroLIB"。
5.2 轨迹漂移问题
-
现象:设备静止时,坐标数值缓慢增加;或上电瞬间坐标跳变。
-
解决:
-
启动校准:光流传感器上电瞬间会有初始化噪声,务必在
while(1)之前读取并丢弃一次数据。 -
增加死区:在代码中添加
if (abs(dx) < threshold) dx = 0;。 -
零偏处理:严格执行上电前 3 秒静止校准,获取准确的
Yaw_Offset。
-
5.3 I2C 读出 0xFF
-
原因:软件模拟 I2C 时序对上拉电阻依赖性强。如果模块未板载上拉电阻,SDA/SCL 信号无法拉高。
-
解决:务必在 PB10 和 PB11 上分别接 4.7kΩ 电阻到 3.3V 电源。
7. 总结与扩展
本项目实现了一个基于**“相对定位”原理的低成本轨迹记录仪。它避开了 GPS 的环境限制和磁力计的干扰问题,非常适合用于室内移动机器人、手持扫描设备或交互式输入设备**。
未来优化方向:
-
上位机显示:通过串口将
Global_X, Global_Y发送至电脑,使用 Python (Matplotlib/Turtle) 实时绘制轨迹图。 -
平滑滤波:引入卡尔曼滤波 (Kalman Filter) 进一步融合加速度计数据,提高快速移动时的平滑度。
源码已上传至附件,欢迎下载交流!如果觉得本文有用,请点赞收藏。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐



 22
22 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)