端到端十年演进
摘要: 端到端自动驾驶(2015-2025)从学术探索发展为工业标准,经历了三个阶段:行为克隆(2015-2018)、感知端到端(2019-2022)和一体化端到端(2023-2025)。2025年的技术通过世界模型、eBPF监控和VLA语义增强,实现了从机械执行到拟人化驾驶的跨越。核心对比显示代码量、输入输出、可解释性等维度显著优化,最终形成具备学习能力和常识的“数字大脑”。
·
端到端(End-to-End, E2E)自动驾驶 的十年(2015–2025),是从学术界的“行为克隆”尝试,演变为工业界公认的“自动驾驶终极标准(AV 2.0)”的进化史。
传统架构像“传声筒”,每个环节(感知、规划、控制)都会产生信息损耗;而端到端架构像“大脑”,传感器数据进,驾驶指令直接出,实现了信息的全局优化。
一、 演进三大阶段:从“实验室”到“老司机”
1. 行为克隆与学术探索期 (2015–2018) —— “初露锋芒”
- 核心逻辑: 基于**卷积神经网络(CNN)**的简单映射。
- 里程碑: * 2016年: NVIDIA 发布 DAVE-2,证明了通过三颗摄像头输入和人类转向角输出,可以让车在简单公路上跑起来。
- 特征: 属于初级的“模仿学习”。系统只能学到简单的转向,无法处理交通信号灯、路口博弈等复杂任务。
2. 模块化神经网络与 BEV 整合期 (2019–2022) —— “感知端到端”
- 核心逻辑: 局部神经网络化,解决感知瓶颈。
- 特征:
- 引入 BEV (鸟瞰图) 和 Transformer,将多摄像头图像融合。
- 感知端到端: 将原来分散的车辆检测、车道线识别整合为一个巨大的感知神经网络(如特斯拉的 HydraNet)。但决策规划(Planning)依然依赖人类手写的 C++ 代码(If-Else)。
3. 一体化端到端与世界模型期 (2023–2025) —— “One Model 时代”
- 核心逻辑: 视频流进,踏板/转向指令出,彻底取消手写代码。
- 2025 现状:
- 特斯拉 FSD v12: 2024 年正式落地的里程碑,将 30 万行 C++ 代码缩减为数千行,驾驶表现出惊人的拟人化。
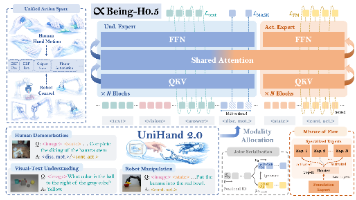
- VLA (视觉-语言-动作) 架构: 2025 年的顶尖架构(如华为、商汤、Wayve)引入了大语言模型,使车具备了“常识”,能理解“请在前方那个黄色隔离墩旁停车”这种语义指令。
二、 核心维度十年对比表 (2015 vs 2025)
| 维度 | 2015 (传统/初级 E2E) | 2025 (一体化端到端) | 核心跨越点 |
|---|---|---|---|
| 代码量 | 数十万行手写 C++ 规则 | 几乎为零 (仅神经网络管理) | 彻底消除“规则僵硬”问题 |
| 输入输出 | 图片 转向角 | 多视频流 全套运动轨迹 | 覆盖了加速、刹车、转向全维度 |
| 可解释性 | 模块清晰,易于调试 | “黑盒”问题 (通过可视化的语义补全解决) | 通过中间层语义化提升透明度 |
| 训练数据 | 万小时级离线数据 | 千万级“老司机”视频剪辑 + 仿真生成 | 数据规模实现指数级增长 |
| 安全冗余 | 简单规则覆盖 | 基于 eBPF 的实时内核安全监控 | 毫秒级保障 AI 决策不超物理边界 |
三、 2025 年的技术巅峰:世界模型与自愈系统
在 2025 年,端到端架构已经进化到不仅能“驾驶”,还能“想象”:
- 世界模型 (World Models):
2.0 时代的端到端引入了生成式世界模型(如 GAIA-1)。系统在决策前,会像人类一样在脑中预演未来 秒的不同走法。如果发现某条路径有碰撞风险,系统会提前选择最优解。 - eBPF 内核级监控:
为了解决端到端系统的“黑盒”不确定性,2025 年的架构在底层部署了 eBPF 监控器。它实时审计神经网络的推理延迟和内存占用。如果检测到模型在处理极端路口时产生抖动(Jitter)超过 ,系统会立即启动确定的安全降级逻辑。 - VLA 语义增强:
现在的车不仅能看路,还能“读懂”场景。在复杂的施工区域,VLA 模型能识别出工人挥舞的手势意图,这是过去十年模块化架构几乎无法实现的。
总结:从“机器”到“人类智能”
过去十年的演进,是将自动驾驶从一套**“复杂的机械公式”重构为一个“具备学习能力的数字大脑”**。
- 2015 年: 它是按照指令行事的“木偶”。
- 2025 年: 它是具备驾驶直觉和常识的“老司机”。
End-to-End Autonomous Driving: A Bird’s-Eye View
这个视频由 NVIDIA 团队发布,详细展示了如何通过单一神经网络处理从传感器原始数据到最终规划路径的全过程,是理解端到端技术演进的最佳视觉素材。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐
 12
12 0
0- 0



 已为社区贡献202条内容
已为社区贡献202条内容

所有评论(0)