ICRA 2025 | 西湖大学韩非、范迪夏等:学习游泳:基于数据驱动长短记忆流体动力学模型的四足机器人步态优化
综上,研究人员提供了一种全新的思路来解决水下机器人控制难题。传统方法很难实时模拟水下复杂多变的流体环境,而数据驱动模型让机器人能够从实验中“学习”水的特性,犹如赋予机器人一双感知水流的“眼睛”和“肌肉记忆”。这种让机器人“学会游泳”的探索具有重要意义:它不仅显著提升了特定机器人的游动性能,也为未来水下仿生机器人的设计与控制提供了新范式。利用该方法,研究者成功地让一台原本在水中步 履维艰的四足机器人
学习游泳:基于数据驱动长短记忆流体动力学模型的四足机器人步态优化
Learn to Swim: Data-Driven LSTM Hydrodynamic Model for Quadruped Robot Gait Optimization
韩非1, 2,郭鹏明2,陈浩2,李伟琨2,任景博3,刘乃军4,杨宁4,范迪夏2, *
1. 浙江大学,杭州310027
2. 流体智能与信息化实验室,西湖大学,杭州 310030
3. 信阳师范大学,信阳464000
4. 中国科学院自动化研究所,北京 100190

引用格式:HAN F, GUO P, CHEN H, et al. Learn to Swim: Data-Driven LSTM Hydrodynamic Model for Quadruped Robot Gait Optimization[C]// Proceedings of 2025 IEEE International Conference on Robotics and Automation (ICRA). (临时DOI: 10.48550/arXiv.2505.03146.)
水下机器人如何“学会游泳”:用实验数据和记忆网络预测流体,优化步态在水中游动对于仿生机器人来说是一项巨大的挑战。
陆地四足机器人一旦下水,就仿佛进入了另一个世界:来自水的持续扰动、黏滞阻力以及复杂的流体动力让原本有效的陆地控制策略变得无效。与坚实地面不同,水环境中存在边界层分离、涡流等现象,会产生难以预测的非线性流体阻力。流体与固体的耦合(流固耦合)意味着机器人肢体的运动会影响周围水流,反过来水流又作用于机器人,这种双向作用极难用传统解析模型精确描述。正因如此,让水下仿生机器人“学会游泳”一直是机器人领域令人着迷又头疼的问题。
水下仿生机器人:潜力与挑战
水下仿生机器人(如水陆两栖四足机器人)近年来受到关注。这些机器人结合了腿足的机动性和水中推进的能力,期望像两栖动物那样在陆地和水中自如行动。然而,实现这一点并不容易。陆地上的四足机器人经过多年的发展,已经能在复杂地形稳健行走、奔跑;但一旦进入水中,它们就面临截然不同的动力学条件。自然界中的两栖动物(如青蛙、鳄鱼)能轻松在水下游动,这是因为它们进化出了适应水环境的形态和控制机制。而人工机器人缺乏对水动力的天然适应,在水下环境常常举步维艰:水的黏性使动作受到持续阻尼,稍有运动就激起涡流,使受力情况复杂多变。传统上,工程师可能采用简化的经验力学模型来近似这些水动力,例如将机器人部件近似为平板计算阻力。但是这些经验公式通常只适用于简单情况,难以捕捉运动过程中的非定常流体力变化。过去也有通过机械设计调整(如增加鳍、调整形状)来改善水下性能的尝试,以及对受力进行平均化简处理的模型,但这些方法精度有限,无法支撑机器人在复杂水环境中优化性能。水下流固耦合建模的困难,正是由于其背后的流体力学方程(Navier-Stokes方程)高度非线性,求解成本高且对初边界条件极为敏感。要让机器人真正掌握“游泳”本领,我们需要新的思路来获得对水动力更精确且高效的描述。
数据驱动水动力模型:LSTM记忆非稳态水动力
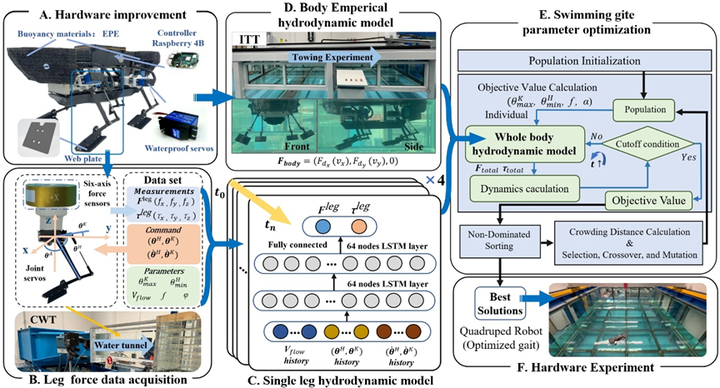
针对上述难题,来自西湖大学FSI实验室等机构的研究者提出了一种数据驱动的方法,让机器人通过“学习”实验数据来掌握水动力规律。他们在最新论文《Learn to Swim: Data Driven LSTM Hydrodynamic Model for Quadruped Robot Gait Optimization》中,提出了基于长短期记忆网络(LSTM)的流体实验数据驱动模型(FED-LSTM)。该模型利用大量实测数据训练而成,能够预测机器人腿部在水中受到的非稳态流体动力。相比静态的经验公式模型,LSTM是一种带有“记忆”能力的循环神经网络,擅长处理时间序列数据,因此非常适合捕捉水动力随时间的动态变化。研究团队构建了一套完整的实验和建模流程:首先,他们改装了一台小型四足机器人Pupper,使其能够下水游动,包括对机身进行防水处理、在每条腿中段加装刚性“脚蹼”(增加受力面积),并在机器人内部加入浮力材料使其具有微小正浮力,以提高水中稳定性。这些硬件增强确保机器人在水中有足够驱动力和稳定性(如图1A所示)。然后,他们在水槽和拖曳水槽中进行了大量实验:在水流循环通道中测量单腿划水时受到的三轴力和力矩(图1B所示),并在拖曳实验中测量机身阻力。通过这些实验获取的真实流体力数据(如各关节角度、速度对应的受力),用来训练FED-LSTM模型,使其学会从机器人腿运动状态预测瞬时的水动力大小。
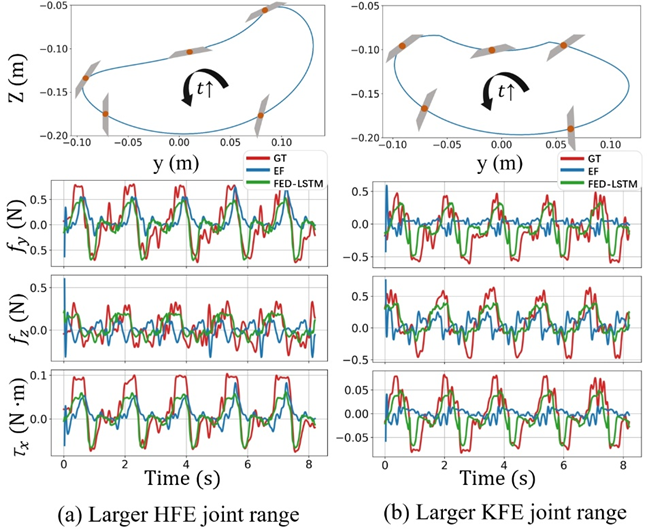
训练完成的FED-LSTM模型可以在已知水流速度和机器人腿关节运动状态(角度与角速度)下,实时预测腿部各方向受力和力矩。论文对比了传统经验公式(EF)模型与FED-LSTM模型在预测性能上的差异。如图2所示,在两组不同的划水运动范围下(分别对应较小和较大的关节摆动幅度),经验模型虽然能定性捕捉受力变化趋势,但预测误差显著大于LSTM模型。特别是对于复杂的运动模式,经验模型难以准确预测腿部力矩等量,而LSTM模型依然表现出很高的精度。定量比较显示:随着水流速度增加,两种模型的预测误差均增大,但经验模型的误差增幅更大;在高流速下,经验模型的均方误差(MSE)急剧上升,而FED-LSTM模型的误差始终保持在较低水平。这说明经验公式在超出简单条件时变得不可靠,而数据驱动的LSTM模型对非线性、非稳态的流体作用具有更好的鲁棒性。
值得一提的是,FED-LSTM模型不仅限于单腿。研究者将每条腿的LSTM子模型和机身阻力模型相结合,建立了全身动力学模型,用于仿真机器人在水中的运动。基于这个模型,他们进一步开展了泳姿(步态)优化 的研究。由于水下运动涉及多目标权衡(例如游泳速度、直线稳定性、转弯半径等),论文采用了NSGA-II(非 支配排序遗传算法II)进行多目标优化 。他们将机器人划水运动由一系列参数决定,例如腿划水幅度、频率、四条腿之间的相位差等,将这些参数作为待优化的决策变量。定义了直线游动和原地转弯两种运动的评价 指标:对于直线游动,希望横向偏移最小、航向偏差最小且用时最短;对于转弯运动,希望转圈半径适当且用 时最短。通过进化算法在仿真环境中对这些目标进行全局优化,可以得到一组在不同权衡下的优选步态 参数(非支配解集合)。论文将其中综合评分最优的几个解用于机器人实物测试,比较基于LSTM模型优化的步 态和基于经验模型优化的步态,在实际水池实验中的表现差异。
实验验证:让机器人游得更快、更稳
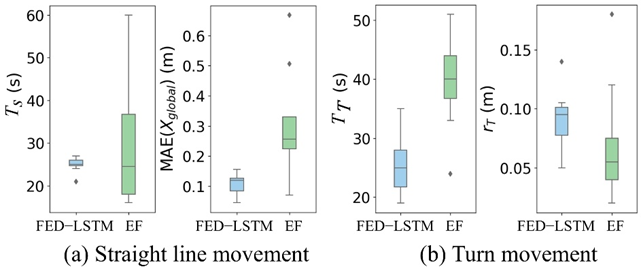
研究团队在一个4m×5m、水深1.5m的水池中进行了开阔水域测试 。实验分别针对直线前进和原地转弯两 种动作,使用上述优化得到的“最佳”步态参数进行对比。结果表明,采用FED-LSTM模型优化的步态明显优 于采用经验模型优化的步态。在直线游动实验中,使用LSTM模型优化的机器人以更快的速度抵达了终点线,用时仅21秒,而传统模型优化的步态用时23秒;更重要的是,前者在到达2米距离时的平均横向偏移仅0.09米,而 后者偏移达到0.17米 。也就是说,基于LSTM的步态使定位精度提高了约47.1%,游泳用时减少了8.7% 。在原地转弯实验中,两种方法下机器人的转弯半径相近(约0.06~0.08m),但LSTM优化的步态仅用22 秒就完成了一周旋转,而经验模型步态则耗时42秒 。尽管两者最终转弯半径差不多,LSTM步态的转圈速度 快了一倍,效率提高约47.6% 。这些结果通过真实环境测试验证了FED-LSTM模型的有效性:它不仅提高了模型预测水动力的精度,还指导机器人获得了更优的游动策略,使其在水中的稳定性和机动性都有所提升。
总结
综上,研究人员提供了一种全新的思路来解决水下机器人控制难题。传统方法很难实时模拟水下复杂多变的流体环境,而数据驱动模型让机器人能够从实验中“学习”水的特性,犹如赋予机器人一双感知水流的“眼睛”和“肌肉记忆”。这种让机器人“学会游泳”的探索具有重要意义:它不仅显著提升了特定机器人的游动性能,也为未来水下仿生机器人的设计与控制提供了新范式。利用该方法,研究者成功地让一台原本在水中步 履维艰的四足机器人实现了平稳游动和高效转弯,这在水下机器人领域属于前沿突破。
未来展望:通往更智能水下机器人的道路
尽管取得了令人瞩目的进展,这项研究仍只是水下机器人智能化的起点。未来,研究者设想可以将物理先验融 入数据驱动模型,例如结合物理信息神经网络(PINN),在模型训练中加入对流体动力学方程的约束,以提升 模型的物理通用性和对未知工况的适应能力。此外,FED-LSTM模型也有望嵌入强化学习框架中,用于训练机器 人在更加复杂的水下任务中自行摸索最优策略,比如实现自主导航、避障,或者在湍流环境中的稳定控制。这 些展望有望进一步拉近水下仿生机器人与生物“游泳健将”之间的差距。可以预见,随着数据驱动模型和智能优化算法的引入,未来的水下机器人将不再只依赖工程师预设的规则,而是能够自主地学习和适应水中的瞬息 变化,真正掌握灵活游泳的本领,在广袤水域中大显身手。
公众号原文链接(文末附论文资源):
https://mp.weixin.qq.com/s/ViVCnjA0u_ZPsFNiUIaMkw
注:文章由作者原创供稿,并获得作者授权发布。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐
 12
12 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)