西门子PLC和汇川PLC新通信选择:Ethernet/IP 的崛起
随着汇川各系列PLC广泛支持EtherNet/IP,了解和掌握EtherNet/IP协议已经成为必备技能,尤其是配合各种工业机器人进行通信,当前各大品牌的机器人均支持EtherNet/IP通信协议例如FANUC/ABB/KUKA/川崎等,相反的是,这些主流机器人品牌原生大都不支持MODBUS协议,而使用Socket通信相信用过的同行们一定记忆尤新。可以看出,Ethernet/IP 协议为工业自动化
西门子PLC和汇川PLC新通信选择-西门子S7-1200/1500系列PLC也开始支持Ethernet/IP通信了。 这为西门子系列的PLC和包括汇川AM400/600等Codesys系PLC的通信提供了新的解决方案。 当前两者之间的通信大多采用ModBus TCP通信。 Modbus TCP和EtherNet/IP的区别主要是应用层不相同,ModbusTCP的应用层采用Modbus协议,而EtherNetIP采用CIP协议,这两种工业以太网的数据链路层采用的是CSMACCD,因此是标准的以太网,另外,这两种工业以太网的网络层和传输层采用TCPIP协议族。 还有一个区别是,Modbus协议中迄今没有协议来完成功能安全、高精度同步和运功控制等,而EtherNet/IP有CIPSatety、ClIP Sync和ClPMotion来完成上述功能,所以才有Schneider加入ODVA,成为ODVA的核心成员来推广EtherNet/lP。 由于这两种网络都是标准的TCPIP以太网,所以所有标准以太网节点都可以接入这两种网络。 相对比Ethernet/IP更稳定可靠,速率更高。 当前西门子S7-1200/1500系列PLC使用Ethernet/IP通信已经广泛应用于和FANUC(发那科)机器人的通信中。 随着汇川各系列PLC广泛支持EtherNet/IP,了解和掌握EtherNet/IP协议已经成为必备技能,尤其是配合各种工业机器人进行通信,当前各大品牌的机器人均支持EtherNet/IP通信协议例如FANUC/ABB/KUKA/川崎等,相反的是,这些主流机器人品牌原生大都不支持MODBUS协议,而使用Socket通信相信用过的同行们一定记忆尤新。 同时FANUC/ABB/KUKA/川崎等机器人添加Ethernet/IP通信不需要额外购买硬件的板卡,仅需要添加软件的选项或免费赠送,相对于其他协议,经济型更好。 1500,1500系列均可调用
在工业自动化领域,PLC(可编程逻辑控制器)之间的通信至关重要。最近,西门子 S7 - 1200/1500 系列 PLC 开始支持 Ethernet/IP 通信,这为西门子系列 PLC 和汇川 AM400/600 等 Codesys 系 PLC 的通信开辟了新途径。
目前,这两者之间大多采用 ModBus TCP 通信。ModBus TCP 和 EtherNet/IP 的区别主要在应用层,ModbusTCP 应用层是 Modbus 协议,而 EtherNetIP 采用 CIP 协议 。它们的数据链路层都采用 CSMACCD,属于标准以太网,网络层和传输层也都基于 TCPIP 协议族。
比如说,在实际代码编写中,如果使用 Modbus TCP 通信,在西门子 S7 - 1200 PLC 中,可能会用到下面类似的代码(这里只是简单示意,实际应用需根据具体需求和硬件配置调整):
// 定义 Modbus TCP 客户端连接参数
VAR
mbClient : MB_CLIENT;
mbConfig : MB_CLIENT_CONFIG;
mbData : ARRAY[0..9] OF INT;
END_VAR
// 初始化 Modbus TCP 客户端
mbConfig.IPAddress := '192.168.0.10'; // 目标 IP 地址
mbConfig.Port := 502; // Modbus TCP 默认端口
mbConfig.Timeout := T#1000ms;
// 调用 Modbus TCP 客户端指令读取数据
mbClient(REQ := TRUE,
MB_CLIENT_CONFIG := mbConfig,
MODE := 0,
ADDR := 40001,
COUNT := 10,
DATA_PTR := ADR(mbData));这段代码中,我们先定义了 Modbus TCP 客户端的相关变量,包括连接配置和数据存储数组。然后初始化连接参数,指定目标设备的 IP 地址和端口,设置超时时间。最后通过 mbClient 指令来读取从地址 40001 开始的 10 个数据。
然而,Modbus 协议在功能安全、高精度同步和运动控制等方面存在局限,迄今没有相应协议来完成这些功能。而 EtherNet/IP 有 CIPSatety、ClIP Sync 和 ClPMotion 来实现。这也是为什么 Schneider 加入 ODVA 推广 EtherNet/IP。
西门子PLC和汇川PLC新通信选择-西门子S7-1200/1500系列PLC也开始支持Ethernet/IP通信了。 这为西门子系列的PLC和包括汇川AM400/600等Codesys系PLC的通信提供了新的解决方案。 当前两者之间的通信大多采用ModBus TCP通信。 Modbus TCP和EtherNet/IP的区别主要是应用层不相同,ModbusTCP的应用层采用Modbus协议,而EtherNetIP采用CIP协议,这两种工业以太网的数据链路层采用的是CSMACCD,因此是标准的以太网,另外,这两种工业以太网的网络层和传输层采用TCPIP协议族。 还有一个区别是,Modbus协议中迄今没有协议来完成功能安全、高精度同步和运功控制等,而EtherNet/IP有CIPSatety、ClIP Sync和ClPMotion来完成上述功能,所以才有Schneider加入ODVA,成为ODVA的核心成员来推广EtherNet/lP。 由于这两种网络都是标准的TCPIP以太网,所以所有标准以太网节点都可以接入这两种网络。 相对比Ethernet/IP更稳定可靠,速率更高。 当前西门子S7-1200/1500系列PLC使用Ethernet/IP通信已经广泛应用于和FANUC(发那科)机器人的通信中。 随着汇川各系列PLC广泛支持EtherNet/IP,了解和掌握EtherNet/IP协议已经成为必备技能,尤其是配合各种工业机器人进行通信,当前各大品牌的机器人均支持EtherNet/IP通信协议例如FANUC/ABB/KUKA/川崎等,相反的是,这些主流机器人品牌原生大都不支持MODBUS协议,而使用Socket通信相信用过的同行们一定记忆尤新。 同时FANUC/ABB/KUKA/川崎等机器人添加Ethernet/IP通信不需要额外购买硬件的板卡,仅需要添加软件的选项或免费赠送,相对于其他协议,经济型更好。 1500,1500系列均可调用
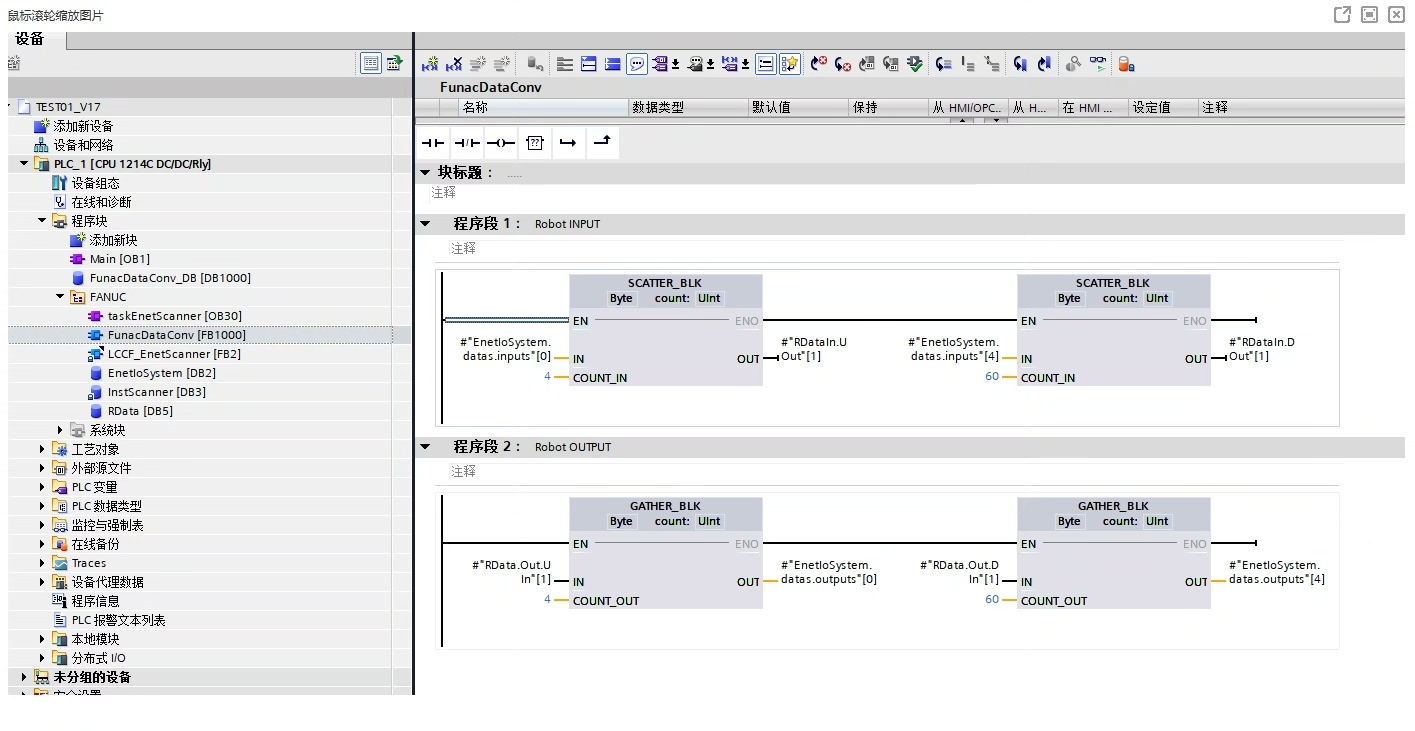
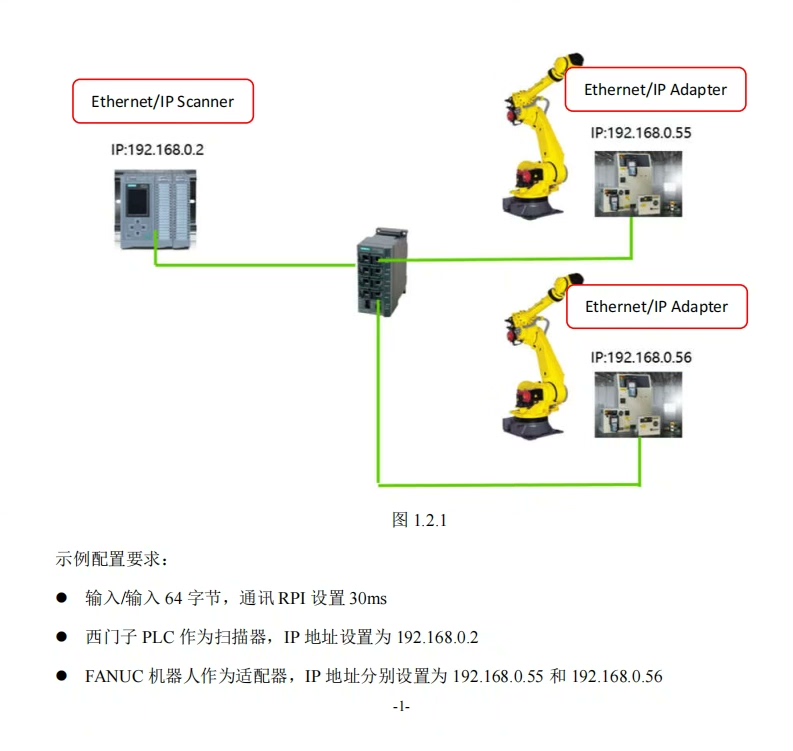
相较于 Modbus TCP,Ethernet/IP 更稳定可靠,速率更高。现在西门子 S7 - 1200/1500 系列 PLC 使用 Ethernet/IP 通信在与 FANUC 机器人通信中已广泛应用。
随着汇川各系列 PLC 广泛支持 EtherNet/IP,掌握这个协议成为必备技能,特别是在与工业机器人通信场景中。像 FANUC/ABB/KUKA/川崎等主流机器人品牌原生大多不支持 MODBUS 协议,却都支持 EtherNet/IP 通信协议。而且添加 Ethernet/IP 通信对于这些机器人来说,不需要额外购买硬件板卡,仅添加软件选项甚至免费赠送,经济性更好。
若在西门子 S7 - 1500 PLC 中使用 Ethernet/IP 与 FANUC 机器人通信,代码可能如下(同样为示意代码):
// 定义 Ethernet/IP 相关变量
VAR
etipConnection : EIP_CONNECTION;
etipData : STRUCTURE_TYPE; // 根据实际通信数据结构定义
END_VAR
// 配置 Ethernet/IP 连接
etipConnection.IPAddress := '192.168.1.20'; // FANUC 机器人 IP 地址
etipConnection.Port := 44818; // Ethernet/IP 常用端口
// 建立连接并进行数据交互(假设这里是读取机器人状态数据)
CONNECT_ETIP(ETIP_CONNECTION := etipConnection);
READ_ETIP_DATA(ETIP_CONNECTION := etipConnection, DATA := etipData);在这段代码里,我们先定义了 Ethernet/IP 连接变量和数据存储结构。接着配置连接参数,指定机器人的 IP 地址和端口。最后通过相关指令建立连接并读取数据。
可以看出,Ethernet/IP 协议为工业自动化通信带来了更多优势和可能性,无论是与汇川 PLC 的通信,还是与各类工业机器人的协作,都值得深入学习和应用。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐

 10
10 0
0- 0



 已为社区贡献4条内容
已为社区贡献4条内容

所有评论(0)