二维占据栅格地图:机器人的“空间指南针”
0.引言
机器人为啥能精准避障、不迷路?酒店配送、家庭清扫、园区接驳的背后,藏着同一个“导航密码”——二维占据栅格地图!它就像机器人的“空间指南针”,撑起定位、避障全流程。
1、通俗理解
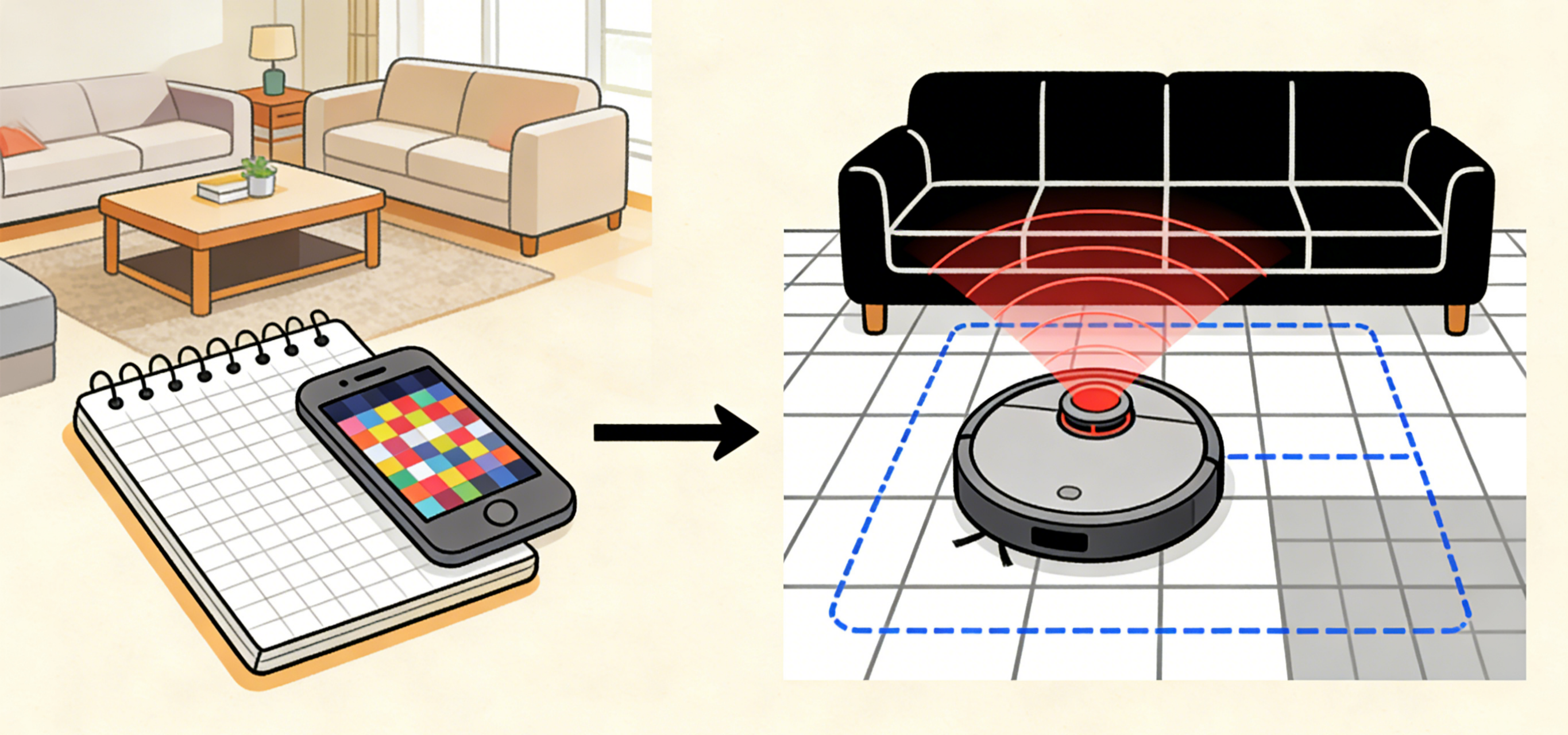
如上图所示,栅格地图的构建依赖机器人搭载的传感器(此处为扫地机器人顶部的激光雷达),传感器实时采集周围环境的距离、轮廓等信息,通过特定算法将这些信息映射到每个栅格中,并用概率值量化表征每个栅格的“被障碍物占据”状态,而非绝对化的“有/无”判断,核心包含三种状态,与上图画面完全对应:
- 占据栅格(上图中深色栅格):栅格内存在障碍物(如沙发、茶几、墙壁等)的概率≥70%,机器人无法通行,是路径规划中需要避开的区域;
- 空闲栅格(上图中浅色栅格):栅格内无障碍物、可安全通行的概率≤30%,是机器人导航、路径规划(上图中连贯的清扫路径)的核心区域;
- 未知栅格(上图中灰色栅格):传感器(激光雷达)未覆盖该区域,无法判断是否存在障碍物,概率介于30%-70%之间,机器人会优先探索该区域,或绕开以保障安全。
其核心价值的在于,将复杂、连续的真实环境,转化为简单、离散的栅格阵列,降低机器人环境感知与路径规划的难度,如上图中扫地机器人的激光雷达扫描、清扫路径规划,均以栅格地图为基础,实现精准定位、灵活避障与高效导航。
2.不同场景要求
(1)城市场景
城市场景是最复杂的应用场景之一,核心以自动驾驶车辆为主要载体,环境特点是“动态障碍物多、场景多变、精度要求高”,因此对占据栅格地图的需求聚焦于「动态适配、高精度、抗干扰」。
精度需求:需达到厘米级栅格分辨率,能精准区分小型障碍物(如井盖、路沿石、护栏),还要清晰标注车道线、人行横道等细节,避免自动驾驶车辆碾压障碍物、偏离车道,这也是城市场景与其他场景最核心的精度差异。
动态适配需求:城市中有大量动态障碍物(行人、非机动车、临时停靠车辆、施工围挡),因此栅格地图需支持实时更新(更新频率≥10Hz),能快速识别动态障碍物的移动轨迹,区分“临时占据”(如行人路过)和“永久占据”(如墙壁),避免车辆误判、急刹或漏避障。
抗干扰需求:城市中存在建筑物遮挡、灯光变化、雨雾风沙等复杂环境,要求栅格地图能适配多传感器融合(激光雷达+相机+毫米波雷达),减少单一传感器故障带来的误差,比如雨天相机失效时,仍能通过雷达数据维持栅格地图的准确性,保障导航不中断。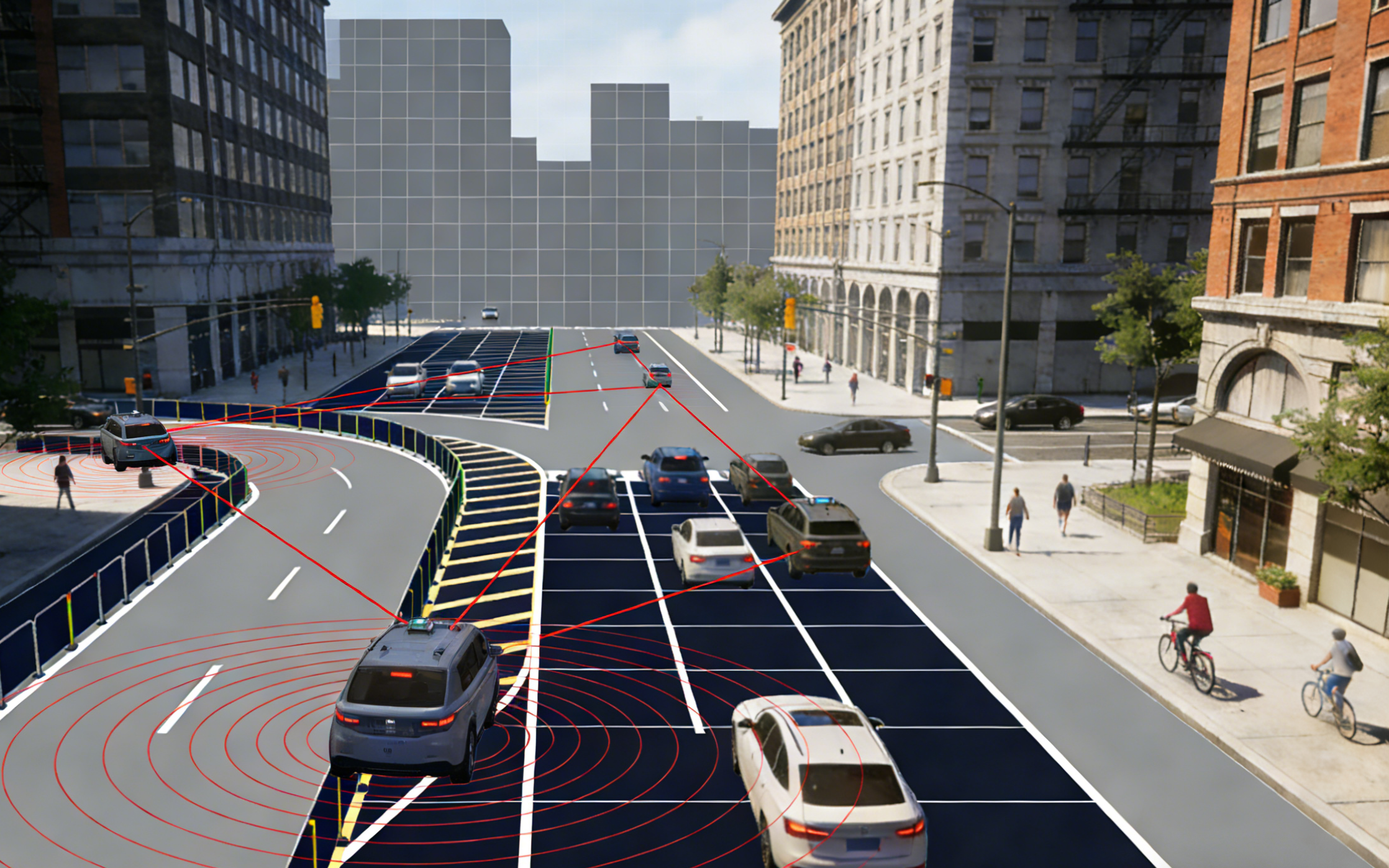
(2)矿山场景
矿山场景的核心载体是矿用无人车、巡检机器人,环境特点是“环境恶劣、障碍物庞大且不规则、路面复杂”,对占据栅格地图的需求聚焦于「抗恶劣环境、抗畸变、适配大型障碍物」,与城市、园区场景差异显著。
抗恶劣环境需求:矿山多粉尘、强光、暴雨、低温,传感器易受干扰,因此栅格地图需具备强抗干扰能力,能过滤粉尘遮挡、强光反射带来的噪声,避免将粉尘误判为障碍物、或将陡坡误判为空闲区域,确保无人车在恶劣天气下仍能正常导航。
障碍物适配需求:矿山障碍物多为大型不规则物体(如碎石堆、矿渣、大型设备、废弃矿车),且部分障碍物会动态移动(如行驶的矿车),因此栅格地图需支持大尺寸栅格与小尺寸栅格混合划分(复杂区域用小栅格、空旷路面用大栅格),既能精准捕捉小型碎石,也能完整标注大型设备的占据范围,避免无人车碰撞。
路面适配需求:矿山路面多陡坡、坑洼、碎石路,栅格地图需结合地形信息,标注路面坡度、坑洼位置(标注为“半占据栅格”),引导无人车调整车速、避开危险路段,这是矿山场景独有的需求(城市、园区路面相对平整,无需重点标注地形)。

(3)园区场景
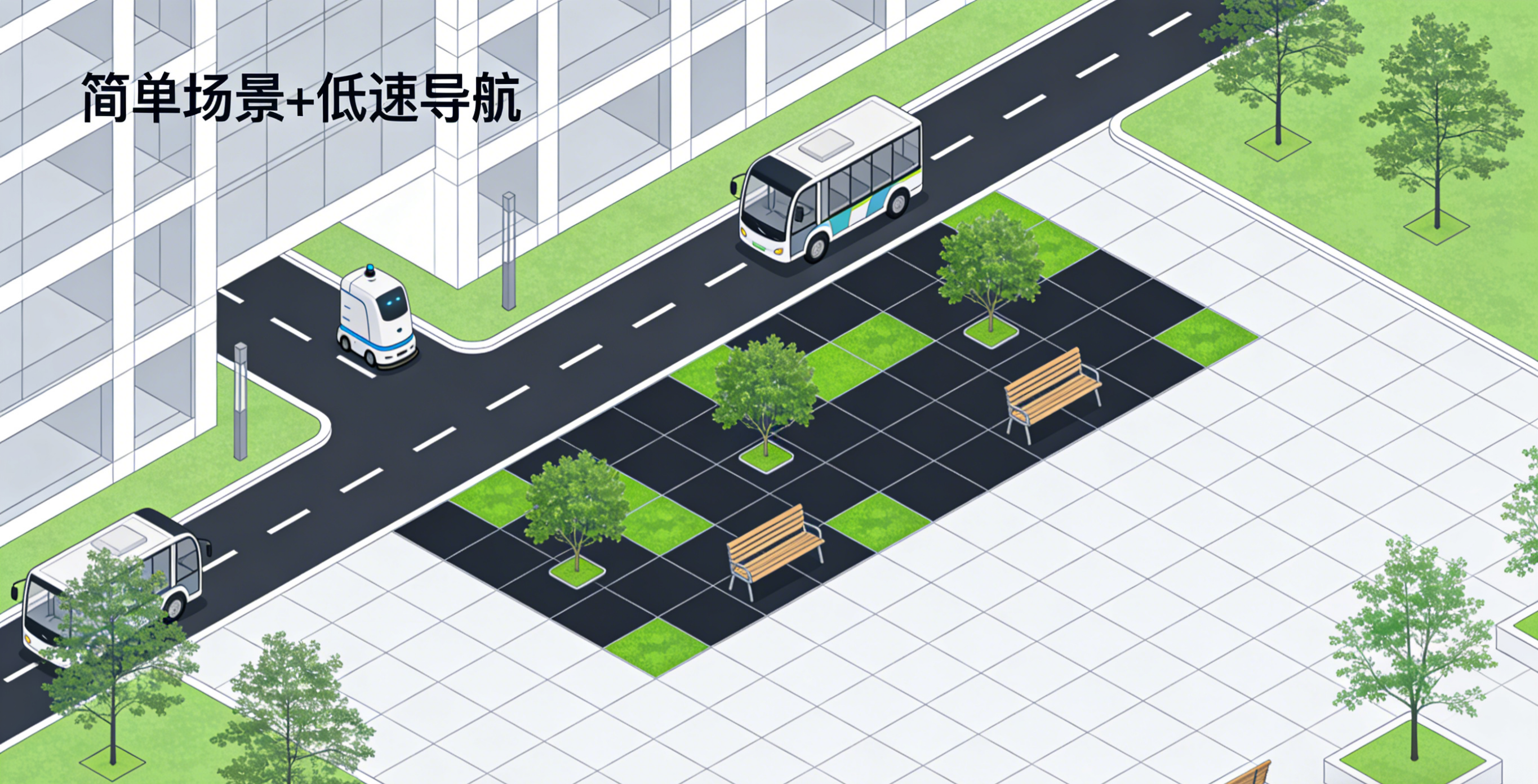
园区场景(如产业园区、住宅小区、校园)的核心载体是园区接驳车、清洁机器人、巡检机器人,环境特点是“场景相对简单、障碍物固定、车速慢、人流量适中”,对占据栅格地图的需求聚焦于「低成本、易维护、适配低速导航」,是三个场景中需求最简洁的。
低成本与易维护需求:园区场景范围小、环境变化少(障碍物多为固定建筑、绿植、长椅),无需高精度传感器和复杂算法,因此栅格地图需支持低成本构建(如仅用视觉相机+简单激光雷达即可),且更新频率无需过高(每天更新1次即可),后期维护简单,降低园区运营成本。
低速导航适配需求:园区设备(接驳车、清洁机器人)车速慢(≤10km/h),对栅格地图的实时更新速度要求较低,但需清晰标注小型固定障碍物(如绿植、长椅、垃圾桶)和人行区域,避免碰撞行人、剐蹭障碍物,同时需规划最优低速路径(如清洁机器人的无死角路径、接驳车的站点停靠路径)。
场景适配需求:园区存在较多狭窄通道(如楼栋之间的小路、绿化带间隙),栅格地图需精准标注通道宽度,区分“可通行栅格”和“不可通行栅格”,引导机器人顺利通过狭窄区域;同时需适配园区的半封闭环境(如大门、围栏),标注禁止通行区域,避免设备驶出园区。
总结来说,三个场景对占据栅格地图的需求,核心是“适配自身环境特点”:城市场景重“动态与精度”,矿山场景重“抗造与适配”,园区场景重“低成本与简洁”——选对栅格地图的配置,才能让机器人、无人设备在不同场景下,都能实现精准导航、安全避障。
3.相关前沿研究
一、城市场景(2 篇)
1. 论文:《Dynamic Occupancy Grid Mapping for Automotive Vehicles Exploiting Temporal and Spatial Information》
- 技术亮点:基于稀疏贝叶斯学习(PC-SBL)框架,首次将雷达距离率直接整合到 EM 迭代中;采用点级预测而非单元格级预测,解决稀疏雷达数据下动态目标跟踪遗漏问题;修改 Gamma 超先验实现动态信息软融合,避免动态目标干扰静态地图。
- 应用场景:城市道路自动驾驶、智能交通监控,适配车辆与行人混行的高动态复杂场景。
- 引用信息:DOI: 无明确公开 DOI(代尔夫特理工大学硕士论文);开源链接:无公开开源链接(硕士学位论文)
2. 论文:《Transformation & Translation Occupancy Grid Mapping: 2-Dimensional Deep Learning Refined SLAM》
- 技术亮点:将 3D SLAM 高精度姿态估计适配 2D 场景,突破传统 2D SLAM 漂移瓶颈;DRL 生成大规模训练数据集,GAN 网络修正建图误差(降低 67%);端到端优化,计算复杂度仅为传统 3D SLAM 的 1/5,适配嵌入式系统。
- 应用场景:城市建筑、复杂城区环境的移动机器人导航、配送机器人地图构建,兼顾轻量化与实时性需求。
- 引用信息:DOI: arXiv:2504.19654v1 [cs.RO];开源链接:无公开开源链接
二、矿山场景(3 篇)
1. 论文:《Open-Pit Map: An HD Map Data Model for Open-Pit Mines》
- 技术亮点:首个露天矿山专用高清地图数据模型(OP-Map),定义 8 类基础元素、11 类位置元素、8 类交通元素;采用 “二维占据栅格 + 高度信息” 分层结构,支持车云端协同更新;开源可视化工具 MapViewer。
- 应用场景:露天矿山无人矿卡导航、车铲协同作业、爆破危险区预警、矿石运输路径规划与调度。
- 引用信息:DOI: 10.3390/app132312681;开源链接: https://gitee.com/wang-zhuo2734/openpit_map
2. 论文:《基于激光雷达的煤矿井底车场地图融合构建方法研究》
- 技术亮点:改进 LeGO-LOAM 算法,融合 SegMatch 优化回环检测 + ICP 全局图优化,解决井下 SLAM 漂移问题;3D 点云投影生成 2D 占据栅格,SOR 滤波滤除动态障碍物与离群点;建图精度达 0.01m,存储量较点云地图降低 3 个数量级。
- 应用场景:煤矿井底车场、金属矿山井下巷道等无 GPS、高粉尘、空间狭小环境的机器人自主定位与导航。
- 引用信息:DOI: 10.13199/j.cnki.cst.2022-1111;开源链接:无公开开源链接(期刊论文)
3. 论文:《基于时空连续补偿的矿山可通行区域识别方法》
- 技术亮点:提出时空双维度补偿机制,适配矿山非结构化道路;多平面拟合 + 区域生长 + DBSCAN 聚类保证空间连通性,时序稳定权重滤除不稳定区域;准确率 93.44%、召回率 99.14%,单帧处理耗时 49ms。
- 应用场景:露天矿山铲装区、崎岖路面的无人驾驶矿卡可通行区域识别、实时避障决策。
- 引用信息:DOI: 10.13272/j.issn.1671-251x.2024050067;开源链接:无公开开源链接(期刊论文)
三、园区场景(2 篇)
1. 论文:《Object-Oriented Grid Mapping in Dynamic Environments》
- 技术亮点:首创面向对象栅格地图(OOGM),突破传统 “单元格独立” 假设;通过语义标签聚类建模同一物体单元格相关性,高动态场景残留单元格密度降低 35%+;兼容现有 NDT-OM 框架,定位误差(ATE)降低 4.5%。
- 应用场景:物流园区、工业园区高动态环境(行人、叉车、临时货架移动)的 AGV/UGV 导航、终身地图维护。
- 引用信息:DOI: arXiv:2309.08324v2 [cs.RO];开源链接: https://github.com/aalto-intelligent-robotics/lamide
2. 论文:《Robust Localization of Industrial Park UGV and Prior Map Maintenance》
- 技术亮点:双向投影平面斜率差滤波提取特征点,较曲率提取方法速度提升 36%;三层体素(ROM+RAM+ikd-tree)维护先验地图,内存占用降低 64%;紧耦合 LiDAR-IMU + 地面约束,实现厘米级定位(z 轴毫米级)。
- 应用场景:大型工业园区、物流园区无 GPS 环境下的 UGV 巡检、集装箱搬运、自主导航与长期地图维护。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐
 13
13 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)