电动式关节型机器人机械手
本文摘要: 第二章主要探讨了机器人机械手的结构设计,重点分析了手部机构、手腕结构和手臂运动系统。手部机构详细介绍了钳爪式的多种类型(12种)及设计要点,包括夹紧力计算、开闭角要求等;手腕结构设计了绕x轴转动的自由度并计算了驱动力矩;手臂部分完成了伸缩和升降的尺寸设计与校核。第三章阐述了基于8031单片机的控制系统设计,采用分层控制架构,包含CPU板、I/O板等组件,详细说明了中断处理电路和掉电保护
第2章 结构的设计
2.1手部机构
手部机构是机器人机械手直接与工件、工具等接触的部件,它能执行人手的部分功能。目前,根据被抓取工件、工件等的形状、尺寸、重量、易碎性、表面粗糙度的不同,在工业生产中使用着多种形式的手部机构,最常见的是钳爪式、磁吸式和气吸式,也有少数的特殊形式。不同形式的手部机构其夹紧力的计算各有不同。
钳爪式手部机构是最常见的形式之一。手爪有两个、三个或多个,其中两个的最多。抓取工件的方式有两种:外卡式和内撑式。从其机械机构特征、外观与功用来看,有多种形式,它们分别是:
(1)拨杆杠杆式钳爪
(2)平行连杆式钳爪
(3)齿轮齿条移动式钳爪
(4)重力式钳爪
(5)自锁式钳爪
(6)自动定心钳爪
(7)抓取不同直径工件的钳爪
(8)具有压力接触销的钳爪
(9)抓勾与定位销十钳爪
(10)复杂形状工件用的自动调整式钳爪
(11)同时抓取一对工件的钳爪与内撑式三指钳爪
(12)特殊式手指钳爪
同时对钳爪的选用也非常重要,应考虑以下几个方面:
1应具有足够的夹紧力,这样才能防止工件在移动过程中脱落,一般夹紧力为工件重量的2到3倍。
2应具有足够的张开角,来适应它抓取和松开工件之间较大的直径范围,而且夹持工件中心位置变化要小(即定位误差小)。
3应具有足够的强度和刚度,以免承受在运动过程中产生的惯性力和震动的影响。
4应能保证工件的可靠定位
5应适应被抓取对象的要求
6尽可能具有一定的通用性
夹持式手部结构由手指(或手爪)和传力机构所组成。其传力结构形式比较多,如滑槽杠杆式、斜楔杠杆式、齿轮齿条式、弹簧杠杆式等。
2.1.1手指的形状和分类
夹持式是最常见的一种,其中常用的有两指式、多指式和双手双指式:按手指夹持工件的部位又可分为内卡式(或内涨式)和外夹式两种:按模仿人手手指的动作,手指可分为一支点回转型,二支点回转型和移动型(或称直进型),其中以二支点回转型为基本型式。当二支点回转型手指的两个回转支点的距离缩小到无穷小时,就变成了一支点回转型手指;同理,当二支点回转型手指的手指长度变成无穷长时,就成为移动型。回转型手指开闭角较小,结构简单,制造容易,应用广泛。移动型应用较少,其结构比较复杂庞大,当移动型手指夹持直径变化的零件时不影响其轴心的位置,能适应不同直径的工件。
2.1.2设计时考虑的几个问题
(一)具有足够的握力(即夹紧力)
在确定手指的握力时,除考虑工件重量外,还应考虑在传送或操作过程中所产生的惯性力和振动,以保证工件不致产生松动或脱落。
(二)手指间应具有一定的开闭角
两手指张开与闭合的两个极限位置所夹的角度称为手指的开闭角。手指的开闭角应保证工件能顺利进入或脱开,若夹持不同直径的工件,应按最大直径的工件考虑。对于移动型手指只有开闭幅度的要求。
(三)保证工件准确定位
为使手指和被夹持工件保持准确的相对位置,必须根据被抓取工件的形状,选择相应的手指形状。例如圆柱形工件采用带“V”形面的手指,以便自动定心。
(四)具有足够的强度和刚度
手指除受到被夹持工件的反作用力外,还受到机械手在运动过程中所产生的惯性力和振动的影响,要求有足够的强度和刚度以防折断或弯曲变形,当应尽量使结构简单紧凑,自重轻,并使手部的中心在手腕的回转轴线上,以使手腕的扭转力矩最小为佳。
(五)考虑被抓取对象的要求
根据机械手的工作需要,通过比较,我们采用的机械手的手部结构是一支点, 两指回转型,由于工件多为圆柱形,故手指形状设计成V型,其结构如附图所示。
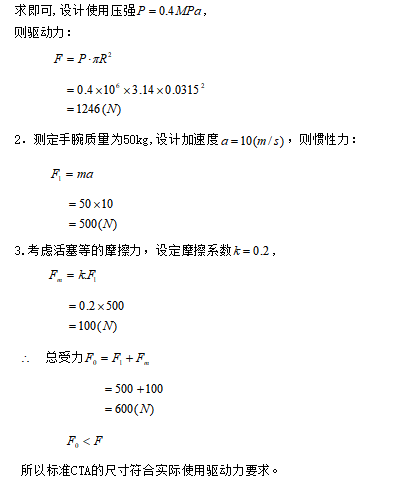
2.1.3手部夹紧的设计
1、手部驱动力计算
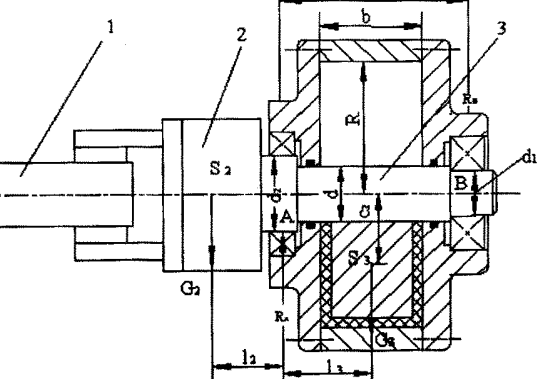
本课题电动机械手的手部结构如图2-1所示: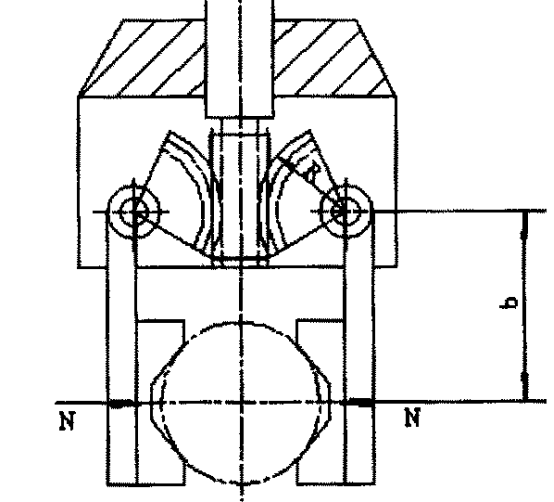
图2-1齿轮齿条式手部
2.2 手腕结构设计
2.2.1 手腕的自由度
手腕是连接手部和手臂的部件,它的作用是调整或改变工件的方位,因而它具有独立的自由度,以使机械手适应复杂的动作要求。手腕自由度的选用与机械手的通用性、加工工艺要求、工件放置方位和定位精度等许多因素有关。由于本机械手抓取的工件是水平放置,同时考虑到通用性,因此给手腕设一绕x轴转动回转运动才可满足工作的要求目前实现手腕回转运动的机构,因此我们选用。它的结构紧凑,但回转角度小于,并且要求严格的密封。
2.2.2 手腕的驱动力矩的计算
手腕转动时所需的驱动力矩
手腕的回转、上下和左右摆动均为回转运动,驱动手腕回转时的驱动力矩必须克服手腕起动时所产生的惯性力矩,手腕的转动轴与支承孔处的摩擦阻力矩,动片与径、定片、端盖等处密封装置的摩擦阻力矩以及由于转动件的中心与转动轴线不重合所产生的偏重力矩.图2-2所示为手腕受力的示意图。
1.工件2.手部3.手腕
图2-2手碗回转时受力状态
2.3手臂伸缩,升降,的尺寸设计与校核
2.3.1 手臂伸缩的尺寸设计与校核
手臂伸缩的尺寸设计
手臂伸缩采用烟台气动元件厂生产的标准,参看此公司生产的各种型号的结构特点,尺寸参数,结合本设计的实际要求,尺寸系列初选内径为100/63。
尺寸校核
-
在校核尺寸时,只需校核内径=63mm,半径R=31.5mm的的尺寸满足使用要
第3章 控制系统设计
由于微型计算机具有体积小,可靠性高,灵活性强,易于配置,功能丰富及价格便宜等特点,采用微型计算机对工业机器人进行控制,已经成为当今机器人控制技术研究和发展的主流。
机械手的控制系统,原则上可分为点位控制与连续轨迹控制两大类。点位控制只要求按规定精度从起始点到达预定点,而对移动路径不做要求。连续轨迹不仅与运动的起点与终点有关,还必须保证运动轨迹与设计轨迹一致。因此,在连续轨迹控制中要进行轨迹设计,并对任意运动轨迹进行补插(补间)运算。为了机器人运动平稳,就必须保证机器人的运动速度、加速度连续,这无疑也需要进行复杂的运算。
微型计算机对机器人的控制,一般采用分层控制的方法。第一层为最高层,其任务是识别工作空间,并据此决定如何完成给定的任务;第二层是决策层,其任务是将给定的操作分成基本的运动;第三层是策略层,其工能是将基本的运动转化成各自由度的运动;第四层是执行层,它将控制机器人完成各自由度的运动。其中第一层及第二层属于人工智能的范畴,机器人的控制主要是研究第三、第四层。
微型计算机种类很多,一般均由以下三部分组成。
A. 中央处理器CPU,或称微处理器MPU。
B. 内存储器,即主记忆装置ROM及RAM 。
C. 输入输出装置I/O,或称接口装置,联系这些装置的为三条总线,即数据总线DB,地址总线AB及控制总线CB。
不同型号的微型计算机主要是中央处理器CPU的内容的功能不同,因而有不同的指令系统和汇编语言。由于外部设备之不同以及是否用于实时控制,其I/O接口装置因而很大差异。RAM和ROM 的存储量大小直接影响计算机的应用范围。但一般微型计算机都可以在原有存储量的基础上加以扩充。
本机器人的控制系统的组织结构如图3-1。它由主CPU板、I/O板、控制面板、示教盒、伺服板、和稳压电源板等组成。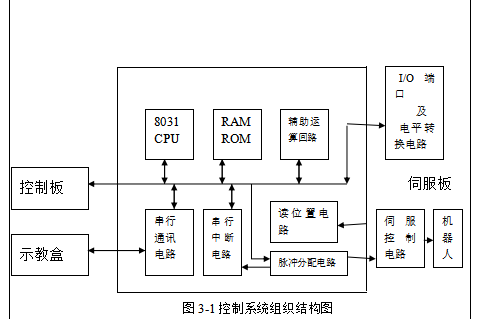
图3-1控制系统组织结构图
主CPU板是本控制器的核心,其上有CPU、存储器、多级中断控制电路、脉冲分配电路、读位置电路以及串行通讯电路等,完成系统的管理、控制运算、伺服系统控制和仿置检测等控制功能以及与示教盒、控制板的通讯。
I/O接口板主要负责输入输出和监测各种故障报警的输入信号。伺服板共8块,负责完成四个轴的位置环速度环和电流环的伺服控制。
本次控制系统设计主要设计CPU、ROM和RAM中断处理电路示教盒以及串行通讯电路键盘显示电路这几个部分。
2)8031的引脚功能
8031为40引脚芯片如图3-4,按其功能可分为三个部分:
a.I/O口线:P0,P1,P2,P3共4个8位口。
P0(双向I/O)口(39~32脚):P0口既可作地址/ 数据总线使用,又可作通用I/O口用。
P1(准双向I/O)口(1~8脚):P1是一个带内部上拉电阻的8位准双向I/O端口。
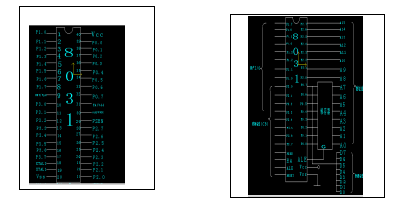
P2(准双向I/O)口(21~28脚):在结构上,P2口比P1口多了一个输出转换控制部分。当转换开关倒向左面时,P2口作通用的I/O端口用,是一个准双向口。
8259A的工作过程及中断应答时序:8259按下列顺序管理外围设备的中断申请:(1)当在IR0~IR7的中断申请输入端上由一个或多个输入出现高电平时,IRR中的个对应为被置1,表明已经由外围设备提出中断申请。
(2)8259A在接受这些中断申请,并分辨优先级的同时,向CPU发出INT脉冲作为应答。
(3)若CPU处于“中断允许”的情况下,在收到INTA信号后应向8259A发出INTA脉冲作为应答。
(4)当8259A接收来自CPU的第一个脉冲(INTA)时,便使ISR的最高优先级相应位置1,而将IRR中于之对应的位置0,并送一条CALL指令码(11001101)至数据总线。
(5)当CPU读到这个CALL指令后便发出两个INTA脉冲至8259A。
(6)这后两个INTA脉冲促使8259把一个预先编程的16位地址传到数据总线上(分两次送出,先低8位后高位)。这个地址就是中断服务程序的入口地址。
(7)当执行完上述的3字节调用指令后,便转移至执行外设中断服务子程序。在子程序执行期间,其相应的ISR位一直保持位1,只有在子程序的末尾,在8259A收到一个EOL(中断结束)命令时,才使相应的ISR复位。
中断应答时序如图所示: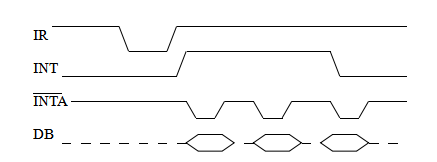
U2输出低电平,通过U5、U6使CE输出≤0.2V,RAM进入数据保护状态,按图中所给参数计算,当Vcc降到4.7V时,U3输出为低电平。若Vcc继续下降到小于E时,使D2截止,D1导通,这时E作为备用电池使用。当单片机系统重新加电时,Vcc由零变到+5V,U2的输出端会出现瞬间干扰脉冲,由于U3和U4间电路的积分延时(约0.7RC),CE不会立即开到高电平。从而抑制了干扰脉冲,抵挡延时结束时,电源电压已稳定在+5V,使CE2成为高电平,6264转为工作状态,单片机可对其进行读/写。
图中U3~U6为一块CMOS回旋密特与非门(CD4093),该芯片直接由备用电源供电,这样才能保证掉电后使CE2≤0.2V,并且重新上电时CE2不受电源电压缺变的干扰。比较器U1、U2由Vcc供电,U1为后备电源E的电压监测电路,当备份电池耗至3.5V以下,发光二极管发亮,表示要更换电池,备份电源可用5号电池或锂电池。
另则主机8031上采用了掉电保护,用555与P1.0,RST与Vcc连接起来实现。
对于8259A可编程中断控制器编程实例:
设8259A为完全嵌套工作方式。中断入口地址间隔为4个字节,IR0的入口地址为0260H时,则8259A的初始化程序如下:
CLR EA 8031CPU禁止中断
MOV R0 ,#00H 送ICW1(A0=0,CS=0A0=0)
MOV A ,#76H(0111011013),设ICW1命令字
MOVX @R0,A ICW1命令字送入8259A
MOV R0 ,#01H , 送ICW2(A0=1,CS=A0=0)
MOV A,#02H , 中断入口的高8字节地址为02H
MOVX @R0,A , 送ICW2命令字入8259A
SETB EA , 8031CPU中断允许
SETB IT0 , 8031选择INT0为负跳变触发
SETB EX0 , 8031允许INT0中断
8259A中断服务程序流程图如下:
程序清单如下:
ORG 0003H
INTO:PUSH PSW , 保护现场
PUSH A
MOV R0 , #00H
MOVX A , @R0 取CALL码,丢弃
MOV DPL ,A 取中断服务程序入口地
址低8位
INC R0
MOV R0 , #01H
MOVX A , @R0
MOV DPH , A 取中断服务程序入口地
址高8位
CLR A
JMP @A+DPTR 转向8259A 、IRx中断
服务子程序
ORG I0260H , IR0中断服务子程序
LJMP IR0
NOP
·
·
·
LJMP IR7
NOP
ORG IR0
IR0:LCALL LAB ,模拟中断返回
8259A服务子程序,延时10ms
先计算10ms定时所需的定时器初值,采用定时器方式1,即16位计数器方式,计数器的始终频率为6MHZ
X=M-定时值/T
T=12/晶振频率=12/6×106 =2us
=216 --(10×10-3 /2×10-6 )
= 65536-15000
=50536
=1110110001111000B
则TH0初值为ECH
TL0初值为78H
子程序清单:
MOV TMOD ,#01H 定时器方式1
MOV TH0 ,#ECH 定时器高8位初值
MOV TL0 ,#78H 定时器低8位初值
SETB EA 开中断
SETB ET0 定时器允许中断
SETB TR0 启动计数器
POP Acc
POP PSW
RETI
文章底部可以获取博主的联系方式,获取源码、查看详细的视频演示,或者了解其他版本的信息。
所有项目都经过了严格的测试和完善。对于本系统,我们提供全方位的支持,包括修改时间和标题,以及完整的安装、部署、运行和调试服务,确保系统能在你的电脑上顺利运行。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐


 15
15 0
0- 0



 已为社区贡献8条内容
已为社区贡献8条内容

所有评论(0)