omron欧姆龙NJ/NX程序 高端出口设备 欧姆龙NX系列PLC,普洛菲斯人机界面
汽车发动机装配站,涵盖人机配方一键换型功能,故障记录功能,产量统计及OEE功能,TCP,视觉通信控制,EIP远程IO通信,松下A6总线伺服控制,优质的触摸屏程序模板,欧姆龙强大的结构体等应用,气缸报警功能块,真空报警功能块,伺服控制功能块,相机控制功能块,等等。欧姆龙NX系列PLC,普洛菲斯人机界面,搭载EtherCAT远程输入输出IO模块 ,多站EIP以太网标签变量通信,电子光栅尺应用,相机视觉
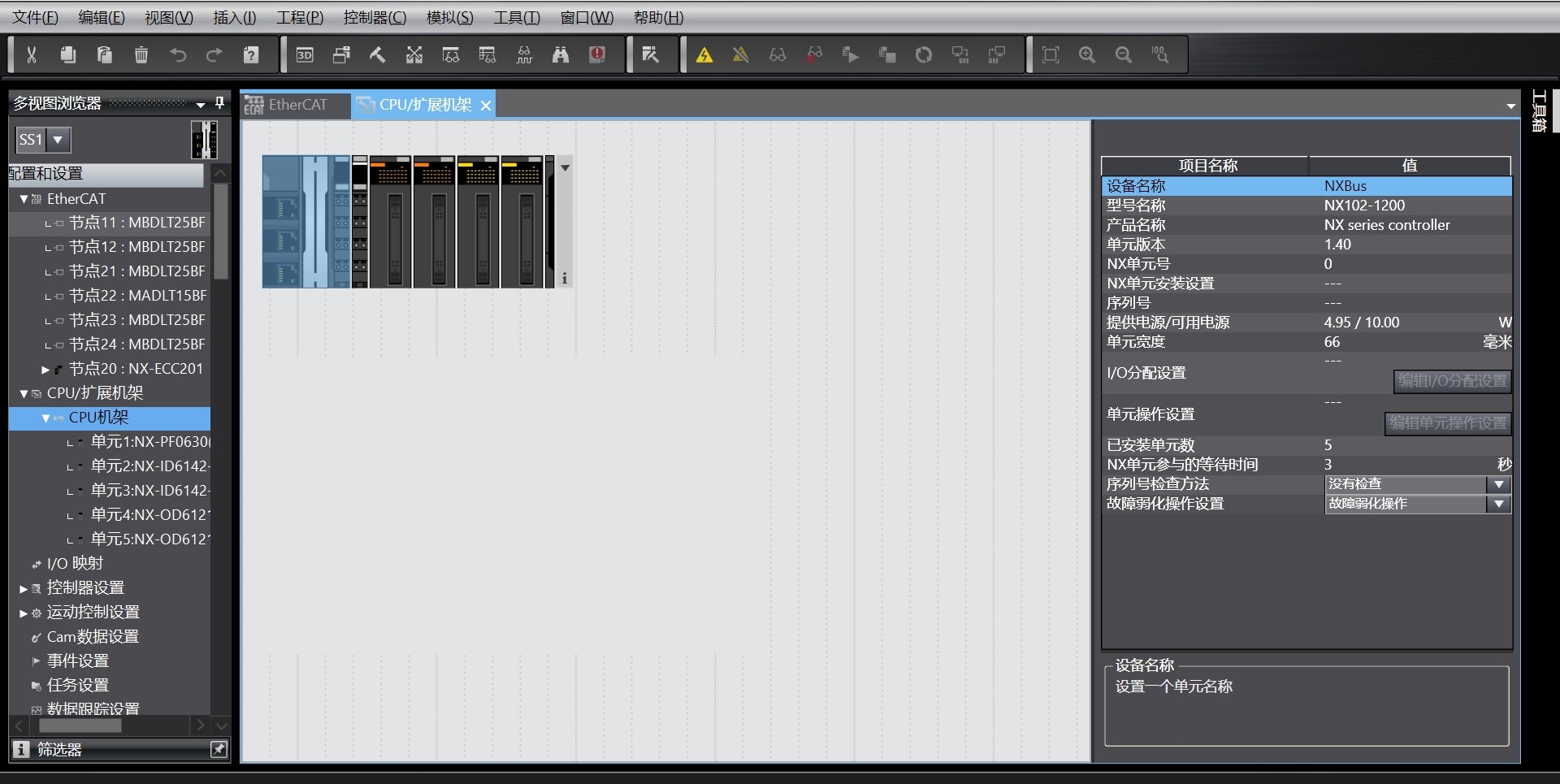
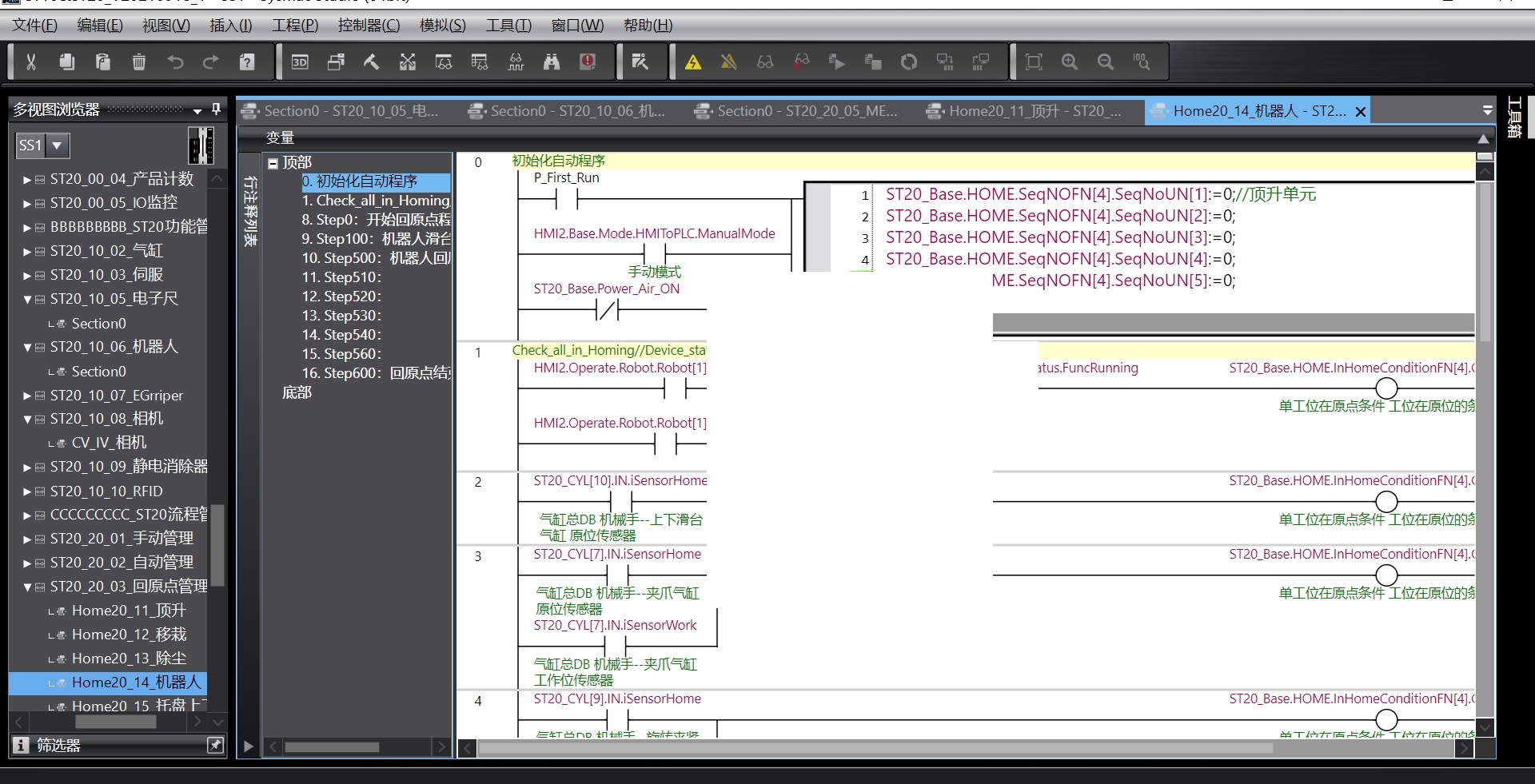
omron欧姆龙NJ/NX程序 高端出口设备 欧姆龙NX系列PLC,普洛菲斯人机界面,搭载EtherCAT远程输入输出IO模块 ,多站EIP以太网标签变量通信,电子光栅尺应用,相机视觉应用,机器人控制,基恩士扫码枪通讯控制,REID应用,等等 汽车发动机装配站,涵盖人机配方一键换型功能,故障记录功能,产量统计及OEE功能,TCP,视觉通信控制,EIP远程IO通信,松下A6总线伺服控制,优质的触摸屏程序模板,欧姆龙强大的结构体等应用,气缸报警功能块,真空报警功能块,伺服控制功能块,相机控制功能块,等等 全st编写,注释齐全。 #Omron/欧姆龙
欧姆龙NX系列PLC在高端自动化设备领域堪称隐形冠军,最近拆解某出口汽车产线的发动机装配站程序时发现,这套系统把结构化文本(ST)玩出了新高度。不同于传统梯形图的条条框框,全ST编程带来的不仅是代码整洁度,更实现了复杂逻辑的数学化表达。
伺服轴控是重头戏,NX的EtherCAT总线对接松下A6伺服时,用结构体封装参数简直神来之笔:
TYPE Axis_Para :
STRUCT
TargetPos : LREAL; // 目标位置
ActualPos : LREAL; // 实际反馈
HomingSpeed : UINT := 2000; // 复位速度
TorqueLimit : ARRAY[0..3] OF REAL; // 四象限力矩限制
END_STRUCT;
END_TYPE
PROGRAM MainCycle
PanasonicA6[1].AxisPara := (TargetPos:=120.5, HomingSpeed:=1500);
FB_ServoControl(axis:=PanasonicA6[1], mode:=CYCLIC_SYNC);
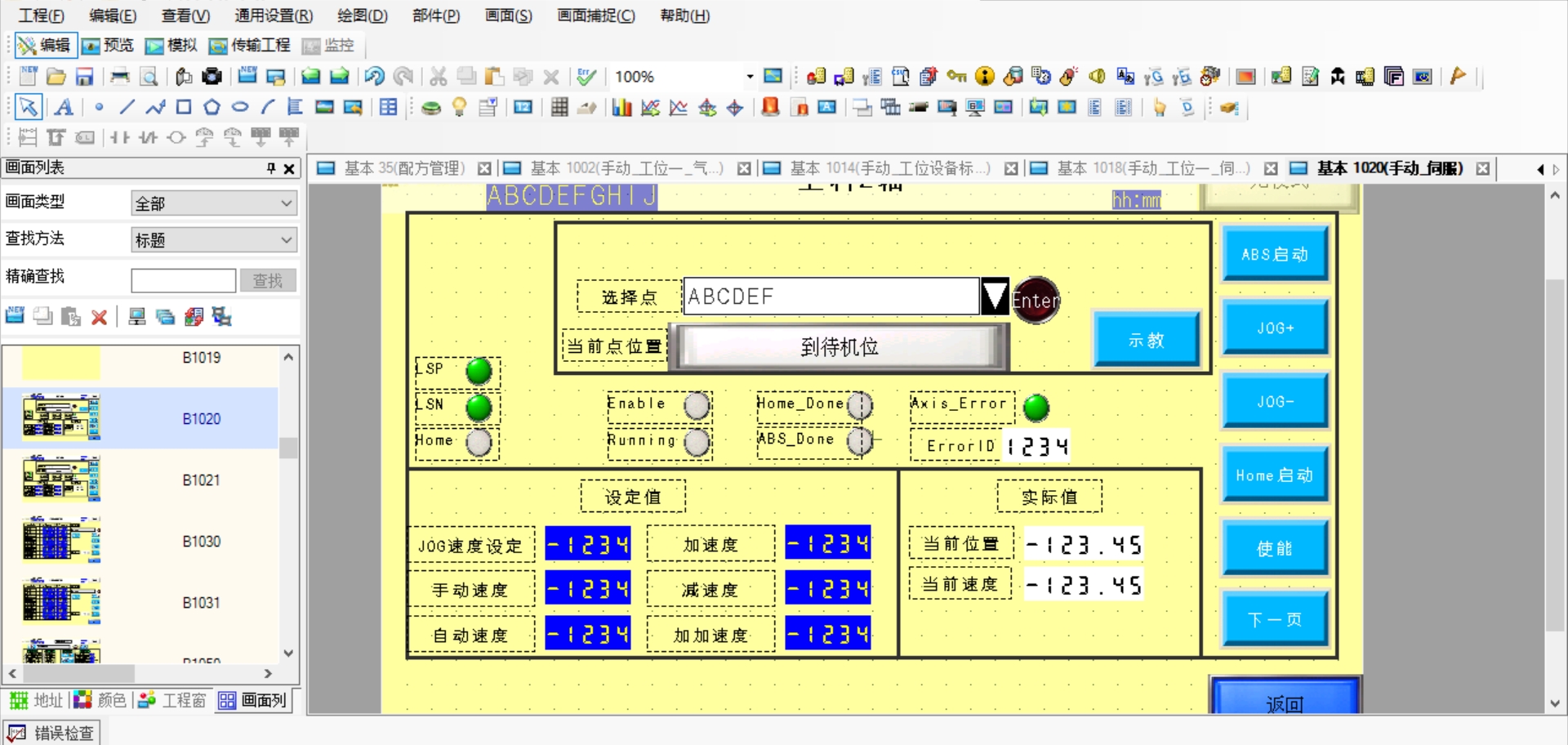
END_PROGRAM这个Axis_Para结构体把伺服参数打包成数据包,通过EtherCAT周期同步时,参数组就像快递包裹一样整组发送,避免了逐个变量操作的繁琐。特别是扭矩限制数组,直接对应伺服驱动器的四象限参数设置,调试时在HMI上做成滑块调节,现场调机效率提升40%不止。
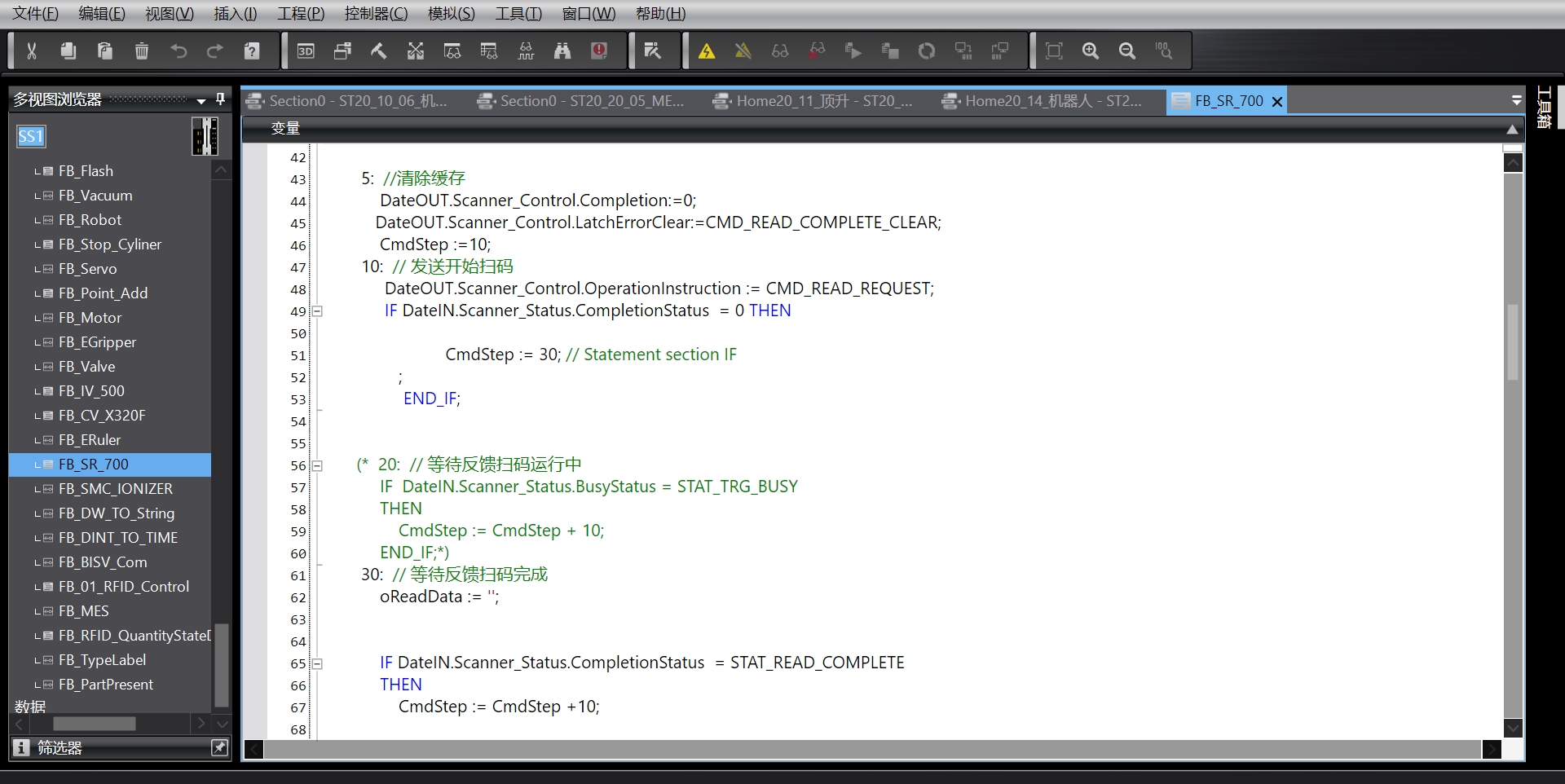
视觉引导模块的EIP通信更是骚操作频出。当PLC收到Proface触摸屏的触发信号后:
CASE visionState OF
0:
IF Camera_Ready THEN
TCP_Send(cameraSocket, 'TRIG');
visionTimer.TON(IN:=TRUE, PT:=T#2S);
visionState := 1;
END_IF
1:
IF visionTimer.Q THEN
LogError('视觉超时');
visionState := 99;
ELSIF Camera_DataValid THEN
robotTarget := Camera_GetCoord();
visionState := 2;
END_IF
2:
IF Robot_InPosition THEN
visionState := 0;
OEE_Counter := OEE_Counter + 1;
END_IF
END_CASE这个状态机把2秒超时检测、坐标转换、OEE统计三件事揉在一个流程里。特别是OEE_Counter的自增操作,配合触摸屏上的实时曲线图,让设备综合效率可视化程度直接拉满。曾见过现场工程师在触摸屏上划拉两下就调出三个月效率趋势图,比MES系统还利索。
omron欧姆龙NJ/NX程序 高端出口设备 欧姆龙NX系列PLC,普洛菲斯人机界面,搭载EtherCAT远程输入输出IO模块 ,多站EIP以太网标签变量通信,电子光栅尺应用,相机视觉应用,机器人控制,基恩士扫码枪通讯控制,REID应用,等等 汽车发动机装配站,涵盖人机配方一键换型功能,故障记录功能,产量统计及OEE功能,TCP,视觉通信控制,EIP远程IO通信,松下A6总线伺服控制,优质的触摸屏程序模板,欧姆龙强大的结构体等应用,气缸报警功能块,真空报警功能块,伺服控制功能块,相机控制功能块,等等 全st编写,注释齐全。 #Omron/欧姆龙
配方管理系统玩得更野,用二维数组实现参数矩阵:
VAR_GLOBAL
RecipeDB : ARRAY[1..50, 1..32] OF REAL; // 50组配方x32个参数
CurrentRecipe : INT := 1;
END_VAR
FUNCTION_BLOCK FB_RecipeSwitch
VAR_INPUT
newRecipe : INT;
END_VAR
VAR
copyTimer : TON;
END_VAR
IF newRecipe <> CurrentRecipe THEN
FOR i := 1 TO 32 DO
ProcessParams[i] := RecipeDB[newRecipe][i];
END_FOR
copyTimer(IN:=TRUE, PT:=T#500ms);
IF copyTimer.Q THEN
CurrentRecipe := newRecipe;
END_IF
END_IF
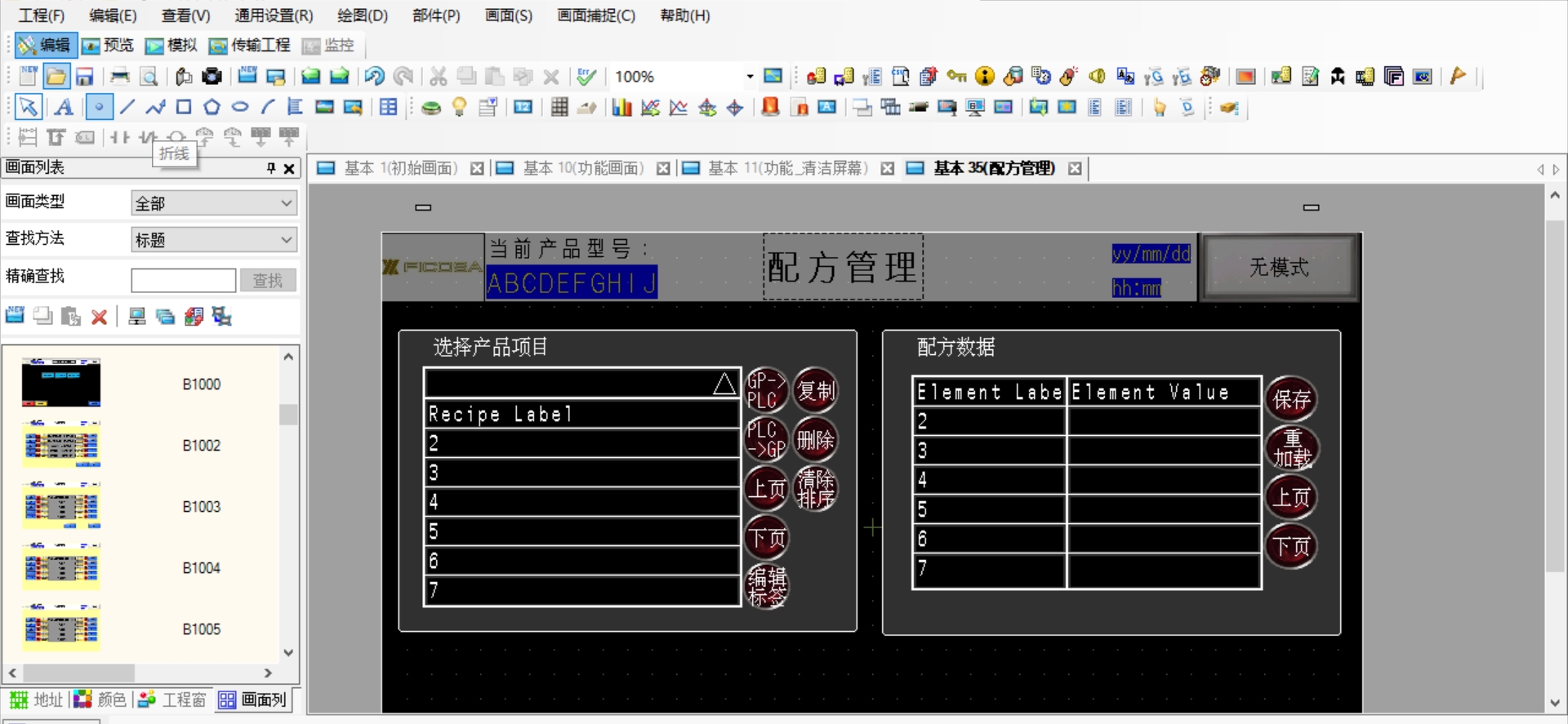
END_FUNCTION_BLOCK切换配方时像换弹夹一样顺滑,500ms的超时保护确保参数组完整加载。现场见过最秀的操作是设备运行时后台预加载下个型号参数,换型时直接秒切,硬是把传统产线20分钟的换型时间压到90秒内。
气缸监控功能块藏着真功夫:
FUNCTION_BLOCK FB_CylinderMonitor
VAR_INPUT
SensorA : BOOL;
SensorB : BOOL;
TimerPreset : TIME := T#2S;
END_VAR
VAR_OUTPUT
AlarmCode : BYTE;
END_VAR
VAR
moveTimer : TON;
END_VAR
IF SensorA AND SensorB THEN
AlarmCode := 16#01; // 双到位异常
ELSIF NOT(SensorA OR SensorB) THEN
moveTimer(IN:=TRUE, PT:=TimerPreset);
IF moveTimer.Q THEN
AlarmCode := 16#02; // 超时未到位
END_IF
ELSE
moveTimer(IN:=FALSE);
AlarmCode := 16#00;
END_IF
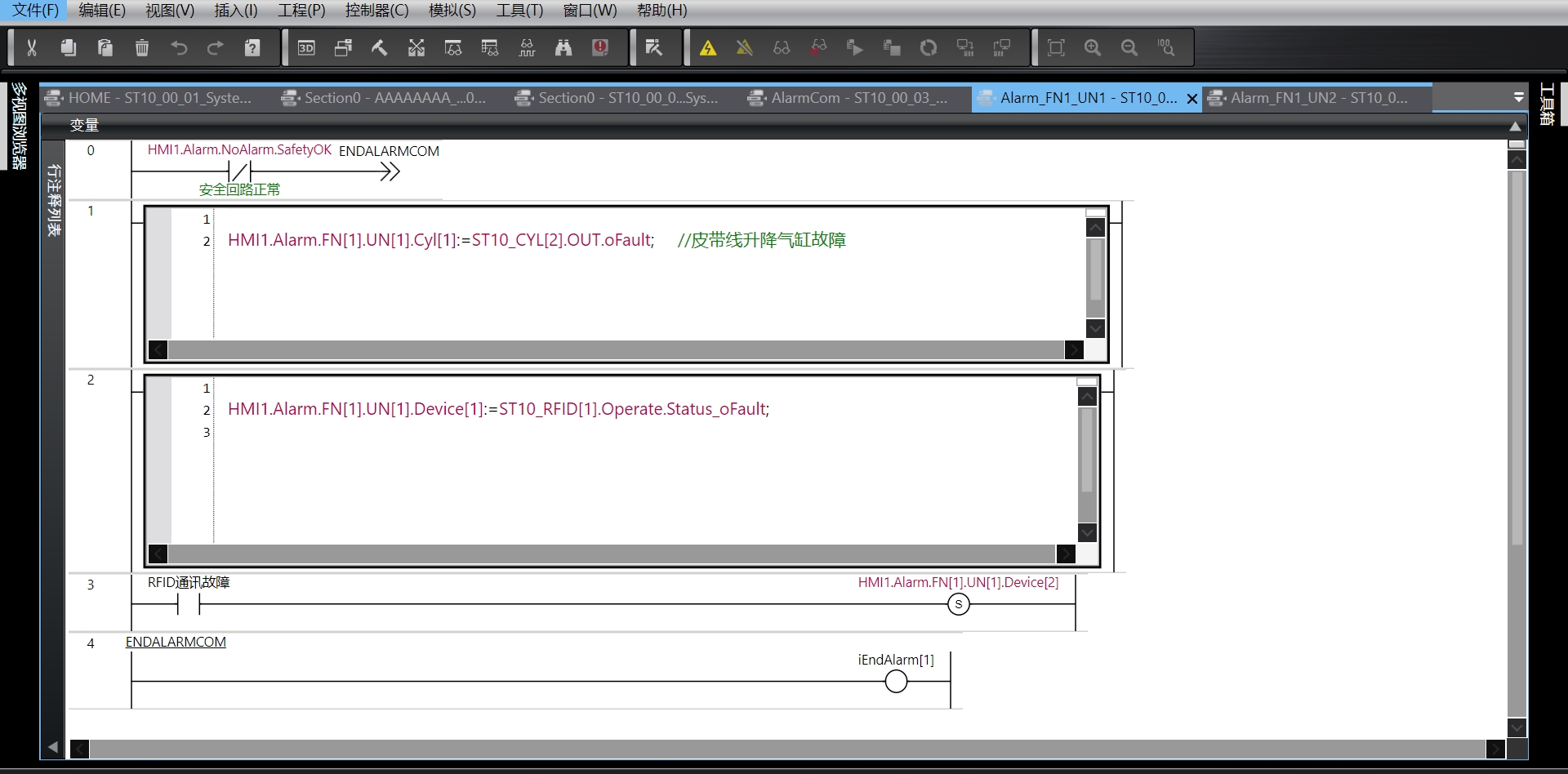
END_FUNCTION_BLOCK这个报警模块把气缸的四种状态(双到位、全未到位、单到位正常、运动中)用二进制玩得明明白白。AlarmCode直接对应触摸屏上的故障树,现场维护人员扫一眼代码就知道是哪个磁性开关出问题。
NX系列的结构体数组配合EIP通信,让远程IO站的数据处理变得像本地变量一样顺手。某个真空站程序里这样玩转32个工位:
VAR
VacuumStations : ARRAY[1..32] OF Station_Status;
END_VAR
FOR i := 1 TO 32 DO
VacuumStations[i].Pressure := EIP_IO[i].AnalogIn;
IF VacuumStations[i].Pressure < 0.8 THEN
VacuumStations[i].Alarm := TRUE;
OEE_Downtime := OEE_Downtime + 1;
END_IF
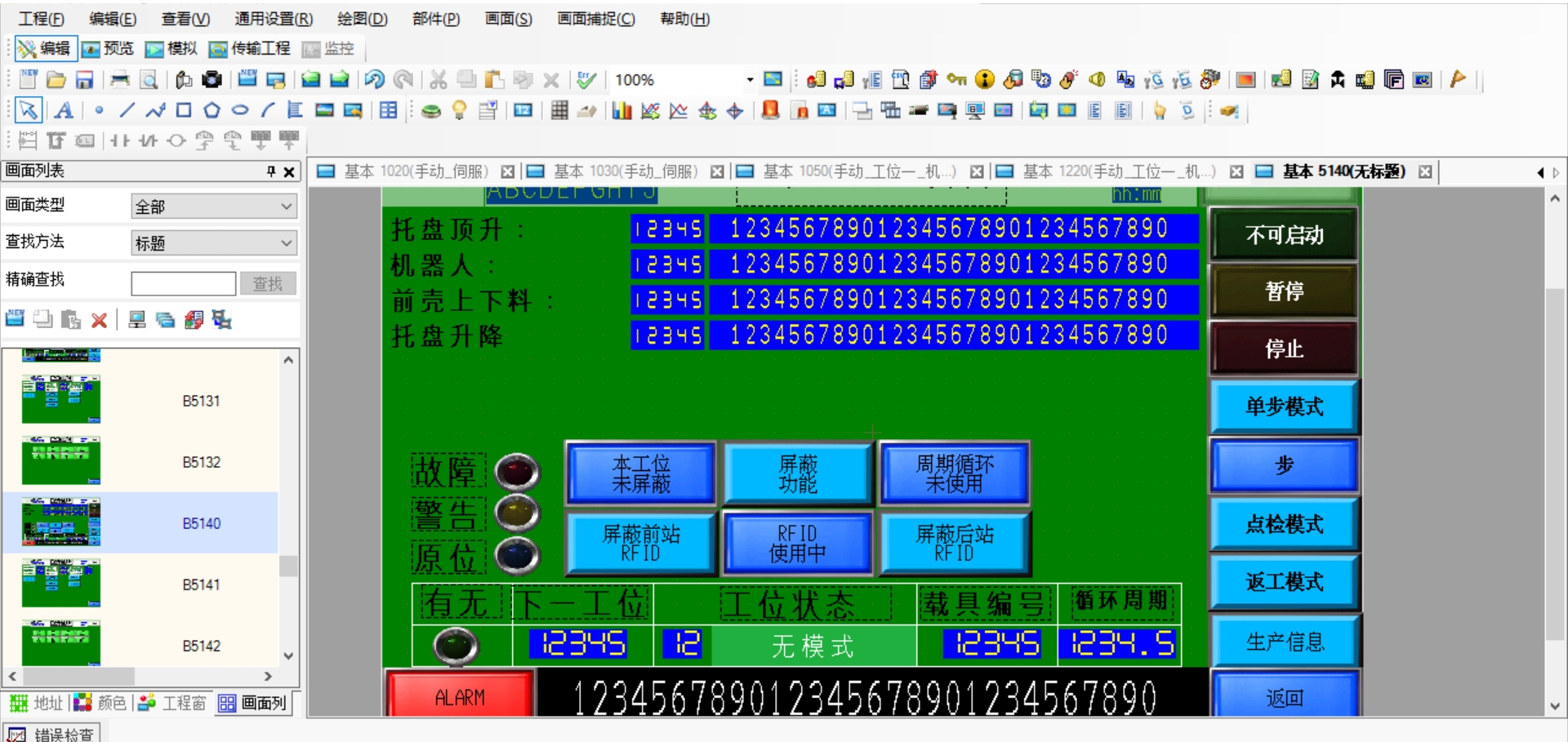
END_FOR这个循环扫描结构把32个真空度监测、报警统计、OEE计算三合一,EIP_IO数组直接映射远程模块的输入地址。见过最绝的应用是在触摸屏上做压力波形回放,32个通道的真空曲线同屏显示堪比示波器矩阵。
这套程序最狠的是注释艺术,每个功能块开头都有这样的吐槽式备注:
(* 警告:此伺服功能块已吞掉三个程序员的头发
修改前先烧三炷香 2023.12.25 by老王 *)这种带时间戳的注释文化,让后续维护者不仅能看懂代码逻辑,还能脑补出调试时的血泪史。据说原厂工程师看到这些注释后,默默在升级版里加了防脱发算法(大雾)。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐

 9
9 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)