具身智能常用工具准备
安装lerobot
1.安装Miniconda
mkdir -p ~/miniconda3
cd miniconda3
wget https://repo.anaconda.com/miniconda/Miniconda3-latest-Linux-x86_64.sh -O ~/miniconda3/miniconda.sh(这一步如果下不了,可以使用国内的链接进行下载:wget https://mirrors.tuna.tsinghua.edu.cn/anaconda/miniconda/Miniconda3-latest-Linux-x86_64.sh -O ~/miniconda3/miniconda.sh)
bash ~/miniconda3/miniconda.sh -b -u -p ~/miniconda3
rm ~/miniconda3/miniconda.sh
source ~/miniconda3/bin/activate
conda init --all
2.创建并激活一个新的 conda 环境用于 lerobot
conda create -y -n lerobot python=3.10 && conda activate lerobot
3.克隆 Lerobot 仓库
# 这里的仓库可以使任意的熟悉的仓库
git clone https://github.com/Seeed-Projects/lerobot.git ~/lerobot
4.安装带有 feetech 电机依赖的 LeRobot
cd ~/lerobot && pip install -e ".[feetech]"
安装mujoco
1.创建一个名为.mujoco的隐藏文件夹,在创建文件夹的位置,使用ctrl+h显示和隐藏所创建的隐藏文件夹
mkdir ~/.mujoco
2.在所创建隐藏文件夹内执行安装
cd ~/.mujoco && wget https://mujoco.org/download/mujoco210-linux-x86_64.tar.gz
tar -zxf mujoco210-linux-x86_64.tar.gz
3.写入和更新.bashrc文件
# .bashrc文件一般位于/home/username/目录下,通过记事本打开,添加下列类似环境变量的语句,保存后关闭
LD_LIBRARY_PATH=/home/user_name/.mujoco/mujoco210/bin
export LD_LIBRARY_PATH=$LD_LIBRARY_PATH:/usr/lib/nvidia
export PATH="$LD_LIBRARY_PATH:$PATH"
export LD_PRELOAD=/usr/lib/x86_64-linux-gnu/libGLEW.so
# 然后更新.bashrc文件
source ~/.bashrc
4.测试
# 在下面路径的bin文件夹下,右键启用终端
# 路径:~/.mujoco/mujoco210/bin
# 运行下述指令
./simulate ../model/humanoid.xml
如果出现下面这个图,Congratulations,安装成功!
5.代码运行
import mujoco.viewer
def main():
# 这里的模型可以去开源项目下载,也可是自己本地保存好的模型xml文件
model = mujoco.MjModel.from_xml_path('model/universal_robots_ur5e/scene.xml')
data = mujoco.MjData(model)
with mujoco.viewer.launch_passive(model, data) as viewer:
while viewer.is_running():
mujoco.mj_step(model, data)
viewer.sync()
if __name__ == "__main__":
main()
运行完成之后,会自动打开mujoco,并显示模型,示例: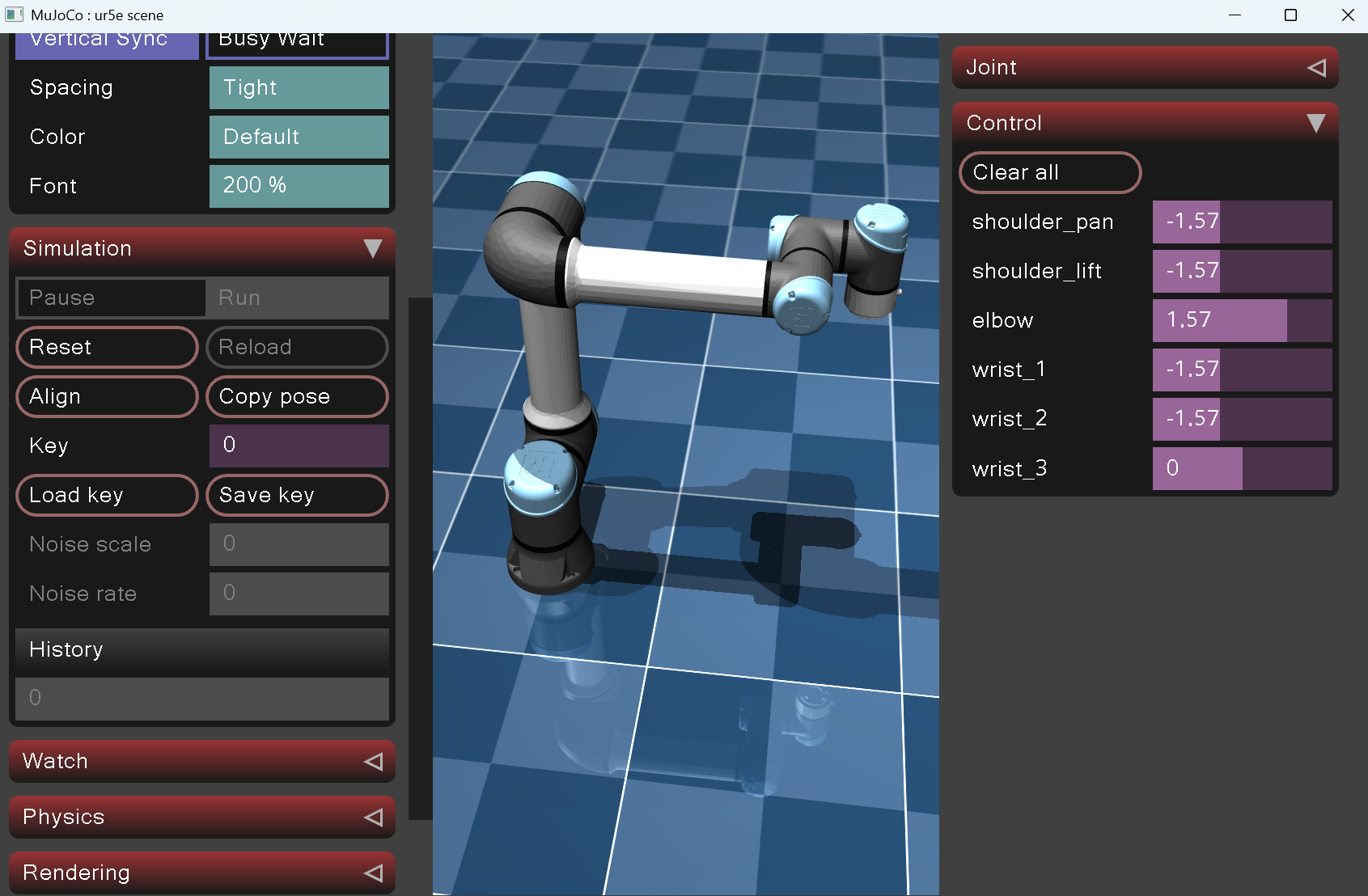
安装ROS2
官方安装文档链接:Ubuntu (Debian) — ROS 2 Documentation: Humble documentation
1.设置locale
官方案例自然地使用英文locale,但是根据文档描述只要是支持UTF-8的locale都可以
sudo apt update && sudo apt install locales
sudo locale-gen en_US en_US.UTF-8
sudo update-locale LC_ALL=en_US.UTF-8 LANG=en_US.UTF-8
export LANG=en_US.UTF-8
2.设置Ubuntu软件源
2.1 首先确认是否已经启用Universe源
# 使用如下命令检查:
apt-cache policy | grep universe
# 返回可能有若干行,但是应该包含如下内容
500 http://us.archive.ubuntu.com/ubuntu jammy/universe amd64 Packages
release v=22.04,o=Ubuntu,a=jammy,n=jammy,l=Ubuntu,c=universe,b=amd64
或者
500 http://us.archive.ubuntu.com/ubuntu jammy/universe amd64 Packages
release v=22.04,o=Ubuntu,a=jammy,n=jammy,l=Ubuntu,c=universe,b=amd64
或者
500 http://us.archive.ubuntu.com/ubuntu jammy/universe amd64 Packages
release v=22.04,o=Ubuntu,a=jammy,n=jammy,l=Ubuntu,c=universe,b=amd64
# 如果没有包含上述内容,那么输入如下命令
sudo apt install software-properties-common
sudo add-apt-repository universe
2.2 添加ROS2 apt 仓库
2.2.1 添加证书
sudo apt update && sudo apt install curl gnupg lsb-release
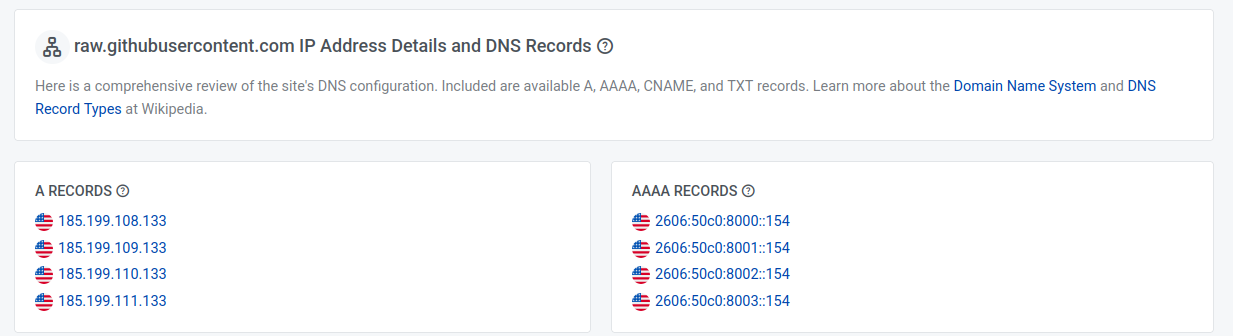
sudo curl -sSL https://raw.githubusercontent.com/ros/rosdistro/master/ros.key -o /usr/share/keyrings/ros-archive-keyring.gpg
这一步如果遇到Failed to connect to raw.githubusercontent.com,请访问 https://www.ipaddress.com 网站,在查询框中输入:raw.githubusercontent.com并回车,在里面找到相应的的ipv4地址:
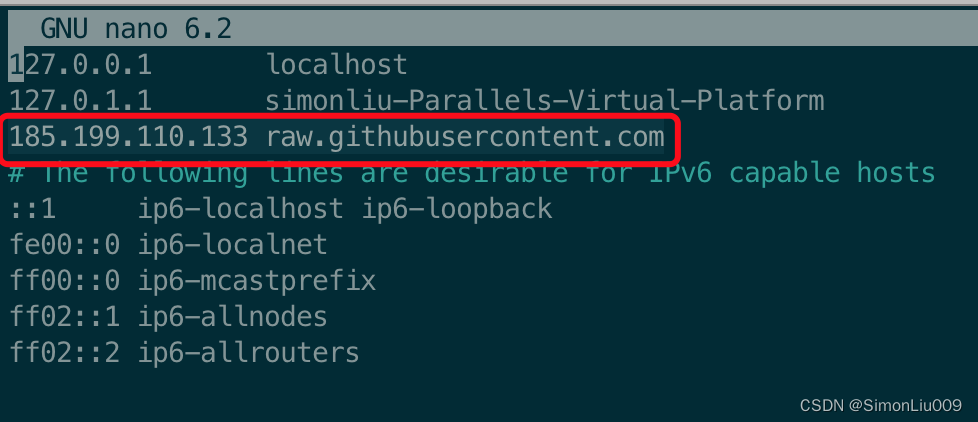
这四个IP地址随便选一个,使用sudo vi /etc/hosts将IP和域名添加到/etc/hosts文件中,如下图:
2.2.2 添加ros仓库
echo "deb [arch=$(dpkg --print-architecture) signed-by=/usr/share/keyrings/ros-archive-keyring.gpg] http://packages.ros.org/ros2/ubuntu $(source /etc/os-release && echo $UBUNTU_CODENAME) main" | sudo tee /etc/apt/sources.list.d/ros2.list > /dev/null
3.安装ros2包
sudo apt update
sudo apt upgrade
sudo apt install ros-humble-desktop
你可能会遇到如下错误:
解决方法:把 “/etc/apt/sources.list” 中的:http://cn.archive.ubuntu.com/ubuntu
全部替换为可用的镜像,例如阿里云的:http://mirrors.aliyun.com/ubuntu/。然后使用sudo apt --fix-broken install命令修复未完成的安装即可。其他镜像列表可参考 Mirrors : Ubuntu中的China部分。

Desktop 版 (推荐)包含: ROS, RViz, demos, tutorials.
老鸟可以安装base版,sudo apt install ros-humble-ros-base,base版仅包含Communication libraries, message packages, command line tools. 不包含 GUI tools.
4.配置环境变量
source /opt/ros/humble/setup.bash
echo " source /opt/ros/humble/setup.bash" >> ~/.bashrc
5.测试
打开第一个终端,启动一个数据的发布者节点:
ros2 run demo_nodes_cpp talker
应该看到: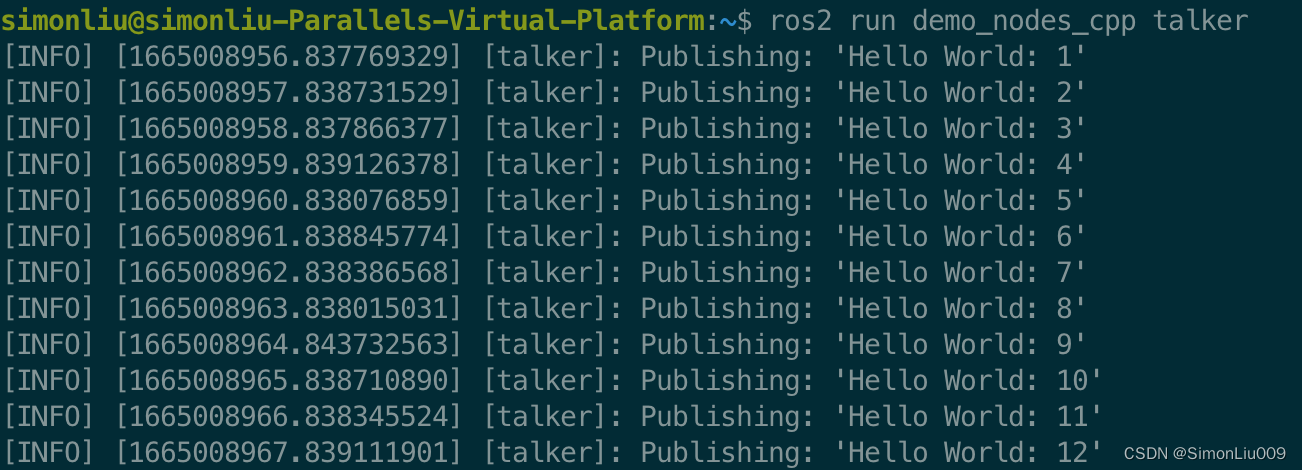
打开第二个终端,启动一个数据的订阅者节点:
ros2 run demo_nodes_py listener
应该看到:
安装gazebo
在安装好ros2之后,就可以安装gazebo
sudo apt install ros-humble-gazebo-ros
启动及验证
gazebo --verbose -s libgazebo_ros_init.so -s libgazebo_ros_factory.so
运行之后能进入gazebo则代表gazebo已经安装成功
关闭所有 ROS/Gazebo 进程
killall -9 roslaunch rosnode gzserver gzclient
参考大佬wiki:
https://wiki.seeedstudio.com/cn/lerobot_so100m/
https://zhuanlan.zhihu.com/p/710418811
https://blog.csdn.net/toopoo/article/details/127178416
https://blog.csdn.net/qq_27865227/article/details/132506784

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐
 26
26 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)