带相机PLC1200 SCL梯形图混编立体库机器人码垛机伺服视觉程序 包括2台西门子PLC12...
现在回想起来,最大的成就感不是调通了设备,而是把这么多协议和语言揉在一起后,程序还能保持可维护性——注释规范真的太重要了,三个月后自己还能看懂的逻辑才是好逻辑。今儿就带大伙儿看看这个项目的技术骨架,尤其是SCL和梯形图混编的实战玩法。不过用SCL处理通讯协议确实香,特别是需要处理结构化数据的时候。对应的梯形图部分就负责处理伺服使能、报警复位这些基础操作,两种语言的分工让程序既保持了可读性,又具备了
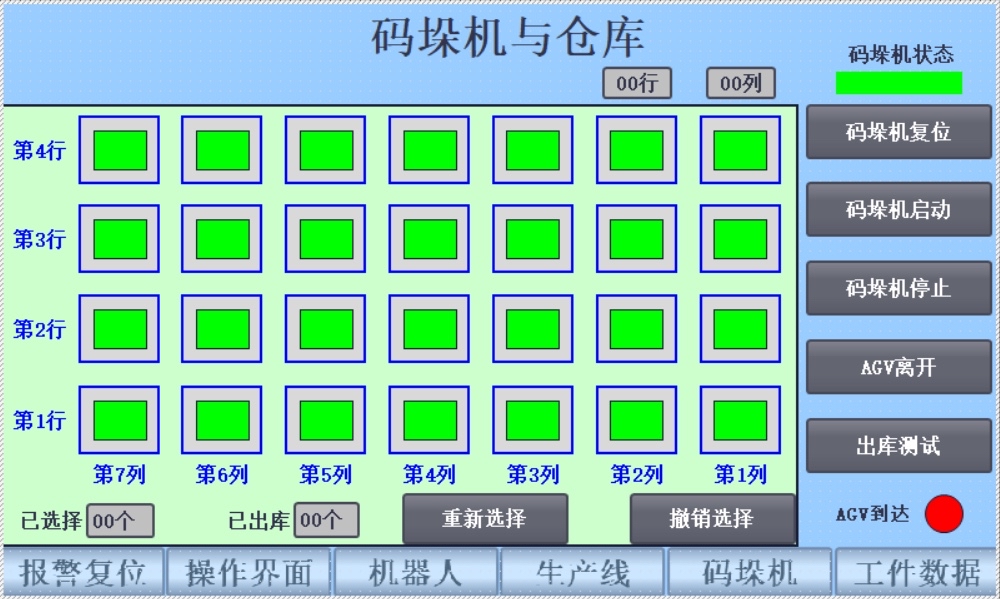
带相机PLC1200 SCL梯形图混编立体库机器人码垛机伺服视觉程序 包括2台西门子PLC1215程序和2台西门子触摸屏TP700程序 PLC和基恩士相机视觉定位Modbus TCP通讯(SCL语言) PLC和ABB机器人Modbus TCP通讯(SCL语言) PLC和码垛机Modbus TCP通讯(SCL语言) PLC和4台G120变频器Profinet通讯 1个伺服轴 SCL语言和梯形图混编,经典程序,知识点丰富,注释全。 程序版本TIA V14及以上
最近在工业自动化圈子里折腾了个硬核项目——立体库机器人码垛系统。这个项目堪称PLC通讯全家桶,把西门子全家福、视觉定位、机器人协同这些要素全给攒齐了。今儿就带大伙儿看看这个项目的技术骨架,尤其是SCL和梯形图混编的实战玩法。
通讯矩阵这张蜘蛛网
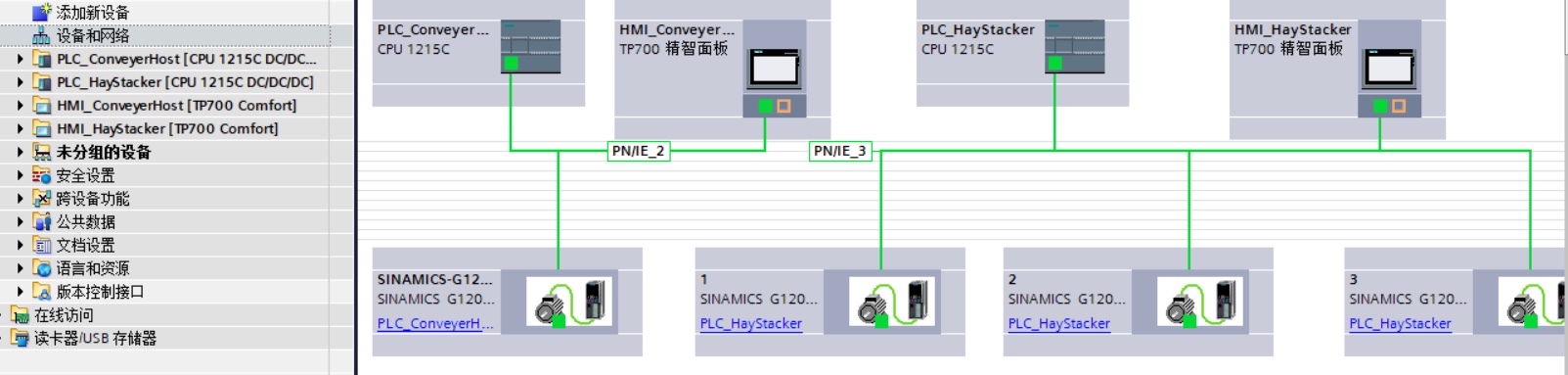
系统里有2台S7-1215 PLC担任主控,配了TP700双屏操作。核心难点在于同时处理:
- 基恩士CV-X200视觉相机(Modbus TCP)
- ABB IRB 460码垛机械臂(Modbus TCP)
- 第三方码垛机(Modbus TCP)
- 4台G120变频器(Profinet)
- 1个伺服轴精准定位
光是看着这堆协议列表,估计不少兄弟已经开始脑壳疼了。不过用SCL处理通讯协议确实香,特别是需要处理结构化数据的时候。比如和视觉相机的坐标交互,用SCL写数据处理明显比梯形图清爽:
// 视觉坐标解析函数
FUNCTION ParseVisionData : Void
VAR_INPUT
RawData : ARRAY[1..6] OF INT;
END_VAR
VAR_OUTPUT
X_Pos : REAL;
Y_Pos : REAL;
Angle : REAL;
END_VAR
BEGIN
// 将16位整数转换为32位浮点
X_Pos := DINT_TO_REAL(SHIFT_LEFT(INT_TO_DINT(RawData[1]),16) | RawData[2]);
Y_Pos := DINT_TO_REAL(SHIFT_LEFT(INT_TO_DINT(RawData[3]),16) | RawData[4]);
Angle := DINT_TO_REAL(SHIFT_LEFT(INT_TO_DINT(RawData[5]),16) | RawData[6]);
END_FUNCTION这段代码把视觉系统传来的6个INT值打包成3个浮点坐标,用到位操作提升转换效率。实际调试中发现基恩士相机数据存在字节序问题,后来在RawData数组处理前加了Swap指令才搞定。
协议全家桶怎么炖
面对多个Modbus TCP主站需求,项目里直接祭出西门子的ModbusCommLoad和Modbus_Master指令块。这里有个坑要注意——每个主站需要独立背景数据块,不然数据会串台:
// Modbus主站配置
#Vision_Comm := MB_COMM_LOAD(
REQ := TRUE,
PORT := 0,
BAUD := 19200,
PARITY := 0,
MB_DB := "Vision_MB_DB"); // 视觉专用背景DB
#Robot_Comm := MB_COMM_LOAD(
REQ := TRUE,
PORT := 1,
MB_DB := "Robot_MB_DB"); // 机器人专用背景DB梯形图这时候就派上用场了,专门处理设备的状态机切换。比如机械臂的自动/手动模式切换,用梯形图的互锁逻辑比SCL直观得多:
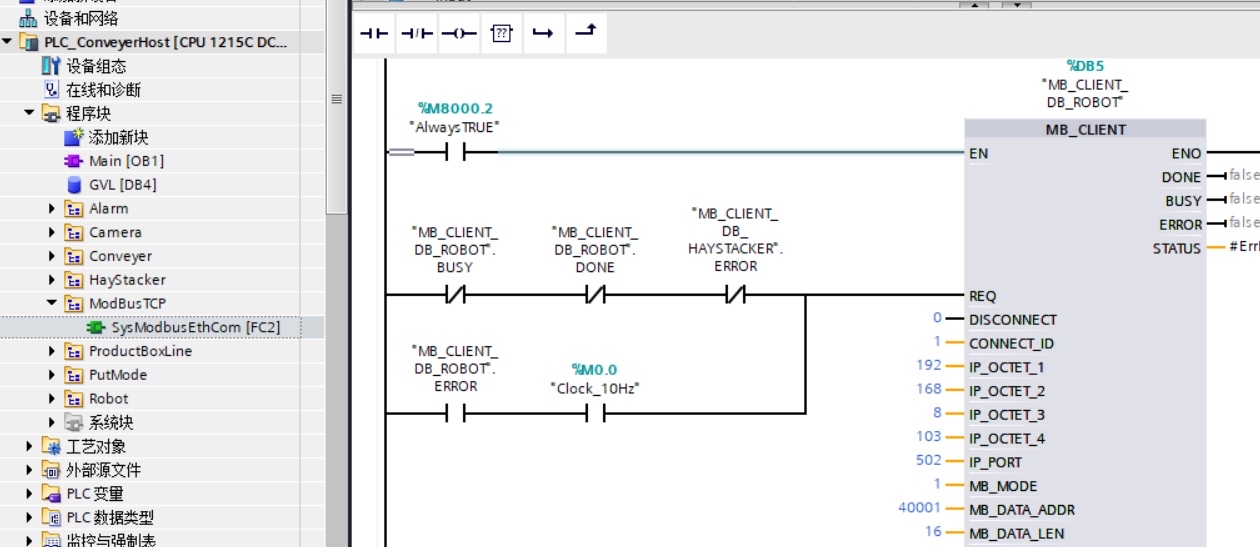
![梯形图状态切换逻辑示例]
带相机PLC1200 SCL梯形图混编立体库机器人码垛机伺服视觉程序 包括2台西门子PLC1215程序和2台西门子触摸屏TP700程序 PLC和基恩士相机视觉定位Modbus TCP通讯(SCL语言) PLC和ABB机器人Modbus TCP通讯(SCL语言) PLC和码垛机Modbus TCP通讯(SCL语言) PLC和4台G120变频器Profinet通讯 1个伺服轴 SCL语言和梯形图混编,经典程序,知识点丰富,注释全。 程序版本TIA V14及以上
(注:此处应有梯形图截图,展示模式切换互锁和急停处理)
Profinet变频器群控
4台G120通过Profinet组网,这里用到了西门子的PNIOSEND/PNIORECV功能块。重点在于过程映像区的规划,每个变频器分配了8字节输入/8字节输出:
// 变频器控制字结构体
TYPE G120_Control :
STRUCT
Start : BOOL; // 启动命令
Speed_Set : REAL; // 转速设定
Fault_Ack : BOOL; // 故障确认
END_STRUCT
END_TYPE
VAR
Drive1_Ctrl : G120_Control; // 映射到QB64-QB71
END_VAR调试时发现变频器的控制字使能位需要500ms脉冲,后来在OB1里加了延时触发才解决。这也提醒我们,官方手册里的时序图真不是摆设。
SCL和梯形图的混编哲学

这个项目里70%逻辑用SCL实现,剩下30%用梯形图。个人总结的混编原则:
- 数据处理、算法、通讯协议用SCL
- 安全回路、状态切换、简单连锁用梯形图
- 复杂功能块用SCL封装,顶层调用用梯形图
比如伺服定位模块,底层用SCL写运动曲线计算,顶层用梯形图做使能控制:
// 伺服S曲线生成
FUNCTION CalcScurve : REAL
VAR_INPUT
TargetPos : REAL;
CurrentPos : REAL;
END_VAR
VAR
Delta : REAL := TargetPos - CurrentPos;
T : REAL := 0.1; // 时间常数
END_VAR
BEGIN
// S型速度曲线算法
RETURN Delta * (3.0 * (T/2.0)**2 - 2.0 * (T/2.0)**3);
END_FUNCTION对应的梯形图部分就负责处理伺服使能、报警复位这些基础操作,两种语言的分工让程序既保持了可读性,又具备了处理复杂算法的能力。
踩过的坑值得记下来:
- Modbus TCP多个主站需要设置不同的连接ID
- 视觉数据的高低位顺序和PLC相反
- 变频器Profinet通讯的看门狗时间要设置合理
- 伺服使能信号需要保持500ms以上
- 触摸屏按钮最好加软件滤波防抖动
这个项目最终在TIA V16环境下跑起来,所有设备协同误差控制在±2mm以内。现在回想起来,最大的成就感不是调通了设备,而是把这么多协议和语言揉在一起后,程序还能保持可维护性——注释规范真的太重要了,三个月后自己还能看懂的逻辑才是好逻辑。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐

 3
3 0
0- 0



 已为社区贡献7条内容
已为社区贡献7条内容

所有评论(0)