轮式移动机器人
本文研究了地面移动机器人的行驶机构设计,重点分析了履带式、腿式和轮式三种运动方式的优缺点及应用场景。针对轮式机器人,设计了一种后轮驱动、前轮转向的四轮结构方案,详细阐述了其机械结构、传动系统、转向机构及运动学模型。控制系统采用主从式架构,通过差速驱动实现灵活运动。该设计在保证稳定性和承载能力的同时,兼顾了结构简单性和控制便利性,适用于平整地面环境下的移动机器人应用。
2 机构的驱动方案设计
2.1 机器人运动方式的选择
到目前为止,地面移动机器人的行驶机构主要分为履带式、腿式和轮式三种。这三种行驶机构各有其特点。
(1)履带式
履带最早出现在坦克和装甲车上,后来出现在某些地面行驶的机器人上,它具有良好的稳定性能、越障性能和较长的使用寿命,适合在崎岖的地面上行驶,但是当地面环境恶劣时,履带很快会被磨损甚至磨断,沉重的履带和繁多的驱动轮使得整体机构笨重不堪,消耗的功率也相对较大。此外,履带式机构复杂,运动分析及自主控制设计十分困难。
履带地面移动机器人是一种通用机器人平台,根据用途的不同,可以在机器人上加装不同的功能模块和传感器,以完成复杂环境下的救援、侦查、排爆、扫雷、伤员撤离等任务。加装了遥控控制电路、主云台摄像头、多个从摄像头、MTI微惯导单元和激光扫描测距传感器(LRF),机器人可以在人远程遥控下运动和作业。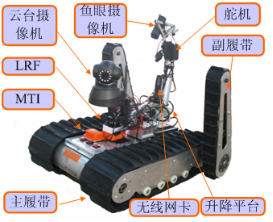
图1 四段履带机器人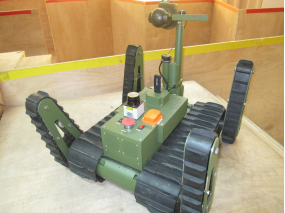
图2 六段履带机器人
(2)腿式
第一,腿式机器人的运动轨迹是一系列离散的足印,轮式和履带式机器人的则是一条条连续的辙迹。崎岖地形中往往含有岩石、泥土、沙子甚至峭壁和陡坡等障碍物,可以稳定支撑机器人的连续路径十分有限,这意味着轮式和履带式机器人在这种地形中已经不适用。而腿式机器人运动时只需要离散的点接触地面,对这种地形的适应性较强,正因为如此,腿式机器人对环境的破坏程度也较小。
第二,腿式机器人的腿部具有多个自由度,使运动的灵活性大大增强。它可以通过调节腿的长度保持身体水平,也可以通过调节腿的伸展程度调整重心的位置,因此不易翻倒,稳定性更高。
第三,腿式机器人的身体与地面是分离的,这种机械结构的优点在于,机器人的身体可以平稳地运动而不必考虑地面的粗糙程度和腿的放置位置。当机器人需要携带科学仪器和工具工作时,首先将腿部固定,然后精确控制身体在三维空间中的运动,就可以达到对对象进行操作的目的了。
当然,腿式机器人也存在一些不足之处。比如,为使腿部协调而稳定运动,从机械结构设计到控制系统算法都比较复杂;相比自然界的节肢动物,仿生腿式机器人的机动性还有很大差距。
腿式机构具有出色的越野能力,曾经得到机器人专家的广泛重视,取得了较大的成果。根据腿的数量分类,有三腿、四腿、五腿和六腿等各种行驶结构。这里我们简单介绍一种典型的六腿机构。
一般六腿机构都采用变换支撑腿的方式,将整体的重心从一部分腿上转移到另一部分腿上,从而达到行走的目的。行走原理为:静止时,由六条腿支撑机器人整体。需要移动时,其中三条腿抬起成为自由腿(腿的端点构成三角形),机器人的重心便落在三条支撑腿上,然后自由腿向前移动,移动的距离和方位由计算机规划,但必须保证着地时自由腿的端点构成三角形。最后支撑腿向前移动,重心逐渐由支撑腿过渡到自由腿,这时自由腿变成支撑腿,支撑腿变成自由腿,从而完成一个行走周期。
腿式机器人特别是六腿机器人,具有较强的越野能力,但结构比较复杂,而且行走速度较慢。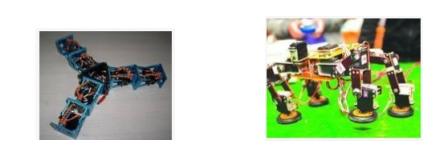
图3 三腿机器人 图4 四腿机器人
(3)轮式
轮式机器人具有运动速度快的优点,只是越野性能不太强。适于室内、硬路面等平整地面,特别不适合松软或崎岖地面。按照车轮数目虽然不能对轮式移动机器人进行严格的归类, 但是不同的车轮数目依然决定了不同的控制方式, 例如滚动机器人和四轮移动机器人显然在控制原理上是不同的。回顾轮式移动机器人研究已取得的主要成果, 按车轮数目对地面移动机器人进行了归类分析, 对单轮滚动机器人、两轮移动机器人、三轮、四轮、六轮及八轮移动机器人、复合式(带有车轮)移动机器人进行了分析和总结。
图6 单轮滚动机器人 图7 两轮移动机器人

2.2 轮式机器人驱动方案设计
轮式机器人的机械结构如图2-1: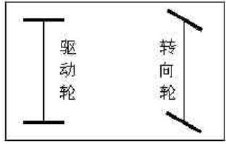
图2-1 后轮驱动,前轮转向结构
根据设计需要和实现的难易程度选择了图2-1中的驱动方案机器人,称之为后轮驱动轮型机器人,它是一种典型的非完整约束的轮式移动机器人模型。后轮为驱动轮,方向不变,提供前进驱动力,两轮驱动速度相同;前轮为转向轮,称为舵轮,通过转向系统同步控制两轮转向,使机器人按照要求的方向移动。
轮式移动机构又主要分三个轮、四个轮、三轮支撑理论上是稳定的,然而这种装置很容易在施加到单独轮的左右两侧力F作用下翻倒,因此对负载有一定限制。为提高稳定性和承载能力,决定选用四轮机构,后轮为两驱动轮,两个转向轮为前轮,具体结构模型见UG图2-2。这种结构能实现运动规划、稳定以及跟踪等控制任务,可适应复杂的地形,承载能力强,但是轨迹规划及控制相对复杂。
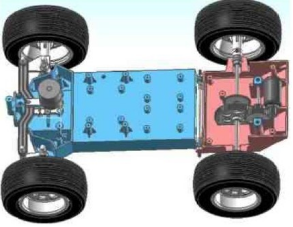
图2-2 小车整体结构UG模型图
2.2.5 变速箱体、前车体及电池箱
变速箱体要求在保证足够刚度的条件下,应尽量减轻车架的重量,以提高有效承载重量。其次,变速箱体应保证其它元件安装上以后,能达到平衡、对称和同轴。材料为ABS,厚度为6mm,轴承盒集成在箱体上,降低了制造难度。变速箱实物参考图如图2-9。
图2-9 变速器实物参考图
前车体是转向机构零件的载体,其结构复杂,要求精度也高(特别是转向节安放孔和电机支撑座等,要求同轴度和垂直度高,因此为了提高装配精度,车体盖和车体配合的螺栓孔采用了卯榫式设计,保证了装配的精度)。
为简化制造工序,提高车体的紧凑程度和牢固程度,将电池盒设计到前车体后部,并且尽量降低电池盒与地面间距,以降低机器人的重心高度。
为了保证运行时电池在和内的牢靠程度和降低噪声,电池盒盖内侧附贴一薄层海绵。
控制电路容易受到电动机和驱动电路的影响,因此我们将控制电路板与驱动板并列排列见图2-10,支脚的布局方式见图2-11。

3 传动机构、执行机构的设计及受力分析
3.1 传动机构
在本课题中我们为了得到稳定和承载能力强的系统结构,采用了两后置驱动轮,转向轮不作为驱动轮,只提供支撑和转向作用。结构形式模仿普通机动车的一些结构,步进电机变速箱输出轴连接拨叉,拨叉拨动左右转向节连杆来实现转向。为了消除传动间隙和电机反转死区,我们在机构中加装了,两个拉紧杆和一条拉紧弹簧,很大程度上消除了误差。转向传动机构受力简图如图3-1。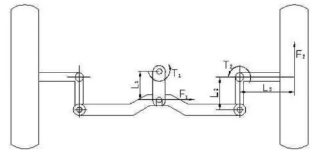
图3-1 转向传动机构受力简图
4 轮式移动机构运动学分析
4.1 轮式式机器人的运动学建模
首先对四轮车辆的水平面运动进行研究.在整个分析过程中,将机器人建模成轮子上的一个刚体,运行在水平面上时,车轮与地面只有点接触,轮子不可发生形变且是纯滚动,不发生滑行、刹车等行为,忽略车轮外倾、侧偏以及轮胎的影响。针对车式机器人的运动学建模,不能单一用后轴中点进行建模还应该取前轴或者其他参考点.这是因为车式机器人相对于普通机器人转弯半径较大,若不取多个参考点,不能完全体现它的运动情况。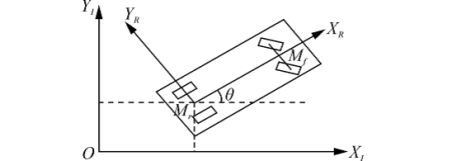
图4-1 四轮车式移动机器人的局部坐标系和全局坐标系
5 轮式移动机器人的运动控制系统设计
5.1 控制系统硬件设计
运动控制器是移动机器人运动控制系统中的核心内容。目前,国内外运动控制器的种类和功能都在不断丰富和发展,但总的情况是,国外的运动控控制器功能强,使用的技术也比较先进,但是价格相当昂贵,更重要的是这种运动控制器的使用方法不易为普通用户所掌握,编程复杂,即使是专业人员也很难熟练掌握,这两大不利因素限制了它的使用范围,国内的运动控制器性能和质量总体来说跟国外的产品有一定的差距,或性能单一,或结构复杂,且同样存在使用不便难以掌握的缺点。那么,能不能设计一种结构简单,成本又低,使用和维护方便的运动控制器呢?这正是本节所尝试解决的问题。在本文中,考虑到机器人小车本体结构的情况和目前移动机器人控制技术的发展状况,采用主从式结构的控制系统,即由上位机完成复杂计算,将处理后的数据传递给下位机,由下位机完成对小车本体的控制; 该系统设计的轮式移动机器人机械导航结构采用四轮差速转向式的机械机构如图5-1所示,前面两个轮是转向轮,后面两个轮是驱动轮,由两台独立的直流电机驱动,分别控制两个驱动轮的转速,可使机器人按照不同方向和速度移动,运动灵活,可控性好。机器人的主要运动状态有直线运动(前进、后退)、左右转弯、原地零半径转弯(360°转向)等。因而,有效地降低了成本。该控制器器通过串口与上位机通信,这样,就简化了控制器与上位机的连接,但不妨碍充分利用上位机的有关软件资源。运动控制系统硬件结构如图5-2所示。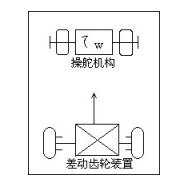
图5-1 移动机器人的底盘系统
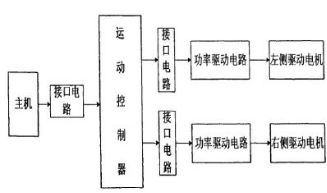
图5-2 控制器硬件结构框图

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐


 4
4 0
0- 0



 已为社区贡献10条内容
已为社区贡献10条内容

所有评论(0)