机器人送料机械手设计
本文介绍了机械手抓取机构的设计要点及整体结构。手部设计要求包括适当的夹紧力、足够的开闭范围、结构简单轻巧等,采用外卡式两指钳爪和液压缸驱动方案。腕部设计采用回转缸结构,计算了工件扭矩。液压系统采用10MPa压力,配有调速阀控制流量。机身采用机座式设计,实现升降和回转运动。控制系统采用固定程序控制方式,通过凸轮和杠杆机构实现动作控制。机械手由执行机构(手部、腕部、臂部、立柱)、驱动系统和控制系统三大
第二章 抓取机构设计
2.1手部设计计算
一、对手部设计的要求
1、有适当的夹紧力
手部在工作时,应具有适当的夹紧力,以保证夹持稳定可靠,变形小,且不损坏工件的已加工表面。对于刚性很差的工件夹紧力大小应该设计得可以调节,对于笨重的工件应考虑采用自锁安全装置。
2、有足够的开闭范围
夹持类手部的手指都有张开和闭合装置。工作时,一个手指开闭位置以最大变化量称为开闭范围。对于回转型手部手指开闭范围,可用开闭角和手指夹紧端长度表示。手指开闭范围的要求与许多因素有关,如工件的形状和尺寸,手指的形状和尺寸,一般来说,如工作环境许可,开闭范围大一些较好,如图2.1所示。
图2.1 机械手开闭示例简图
3、力求结构简单,重量轻,体积小
手部处于腕部的最前端,工作时运动状态多变,其结构,重量和体积直接影响整个机械手的结构,抓重,定位精度,运动速度等性能。因此,在设计手部时,必须力求结构简单,重量轻,体积小。
4、手指应有一定的强度和刚度
5、其它要求
因此送料,夹紧机械手,根据工件的形状,采用最常用的外卡式两指钳爪,夹紧方式用常闭史弹簧夹紧,松开时,用单作用式液压缸。此种结构较为简单,制造方便。
二、拉紧装置原理
如图2.2所示【4】:油缸右腔停止进油时,弹簧力夹紧工件,油缸右腔进油时松开工件。
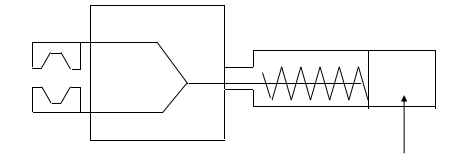
图2.2 油缸示意图
2.2腕部设计计算
腕部是联结手部和臂部的部件,腕部运动主要用来改变被夹物体的方位,它动作灵活,转动惯性小。本课题腕部具有回转这一个自由度,可采用具有一个活动度的回转缸驱动的腕部结构。
要求:回转±90º
角速度W=45º/s
以最大负荷计算:
当工件处于水平位置时,摆动缸的工件扭矩最大,采用估算法,工件重10kg,长度l=650mm。如图2.3所示。
1、计算扭矩M1〖4〗
设重力集中于离手指中心200mm处,即扭矩M1为:
M1=F×S (2.9)
=10×9.8×0.2=19.6(N·M)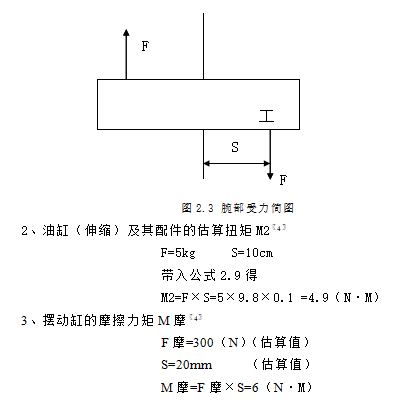
第三章 液压系统原理设计及草图
3.1手部抓取缸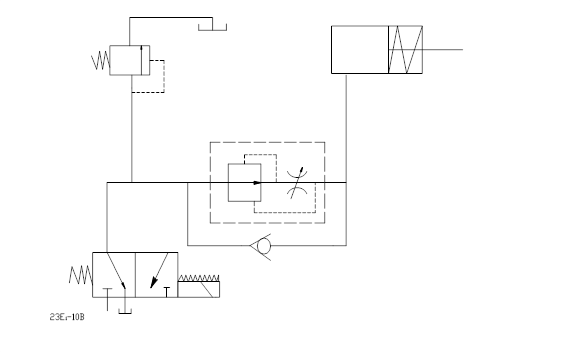
图 3.1手部抓取缸液压原理图〖7〗
1、手部抓取缸液压原理图如图3.1所示
2、泵的供油压力P取10Mpa,流量Q取系统所需最大流量即Q=1300ml/s。
因此,需装图3.1中所示的调速阀,流量定为7.2L/min,工作压力P=2Mpa。
第四章 机身机座的结构设计
机身的直接支承和传动手臂的部件。一般实现臂部的升降、回转或俯仰等运动的驱动装置或传动件都安装在机身上,或者就直接构成机身的躯干与底座相连。因此,臂部的运动愈多,机身的结构和受力情况就愈复杂,机身既可以是固定式的,也可以是行走式的,如图4.1所示。
图4.1机身机座结构图
臂部和机身的配置形式基本上反映了机械手的总体布局。本课题机械手的机身设计成机座式,这样机械手可以是独立的,自成系统的完整装置,便于随意安放和搬动,也可具有行走机构。臂部配置于机座立柱中间,多见于回转型机械手。臂部可沿机座立柱作升降运动,获得较大的升降行程。升降过程由电动机带动螺柱旋转。由螺柱配合导致了手臂的上下运动。手臂的回转由电动机带动减速器轴上的齿轮旋转带动了机身的旋转,从而达到了自由度的要求。
第六章 机械手的控制
控制系统是机械手的重要组成部分。在某种意义上讲,控制系统起着与人脑相似的作用。机械手的手部、腕部、臂部等的动作以及相关机械的协调动作都是通过控制系统来实现的。主要控制内容有动作的顺序,动作的位置与路径、动作的时间。
机械手要用来代替人完成某些操作,通常需要具有图6.1所示的机能〖3〗。
实现上述各种机能的控制方式有多种多样。机械手的程序控制方式可分为两大类,即固定程序控制方式和可变程序控制方式。
本课题所用的是固定程序控制类别的机械式控制。
常用凸轮和杠杆机构来控制机械手的动作顺序、时间和速度。一般常与驱动机构并用,因此结构简单,维修方便,寿命较长,工作比较可靠。适用于控制程序步数少的专用机械手。
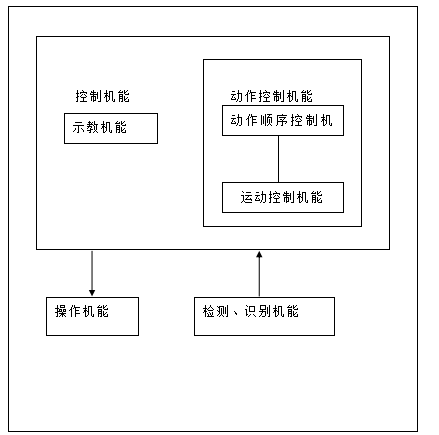
图6.1机械手的控制机能
第七章 机械手的组成与分类
7.1机械手组成
机械手主要由执行机构、驱动系统、控制系统组成。〖9〗
(1、)执行机构:包括手部、手腕、手臂和立柱等部件,有的还增设行走机构如7.1所示。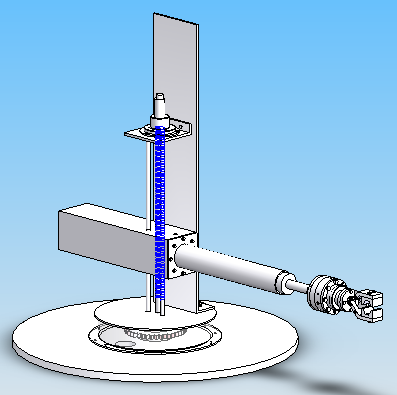
图7.1机构简图

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐

 20
20 0
0- 0



 已为社区贡献6条内容
已为社区贡献6条内容

所有评论(0)