西门子PLC程序开发经验分享:从简单到复杂,如何构建一个清晰的程序结构
模块化设计:将程序划分为多个功能模块,有助于提高代码的可读性和可维护性。通讯配置:ProFinet通讯的配置需要仔细检查网络参数,确保设备间的通讯稳定。伺服控制:伺服的启动和位置控制需要严格按照手册操作,避免硬件损坏。机器人通信:与第三方设备的通信需要仔细阅读设备手册,确保协议兼容。通过这个项目,我深刻体会到模块化设计和清晰的程序结构在复杂自动化系统中的重要性。希望这篇博文能够为其他电气工程师提供
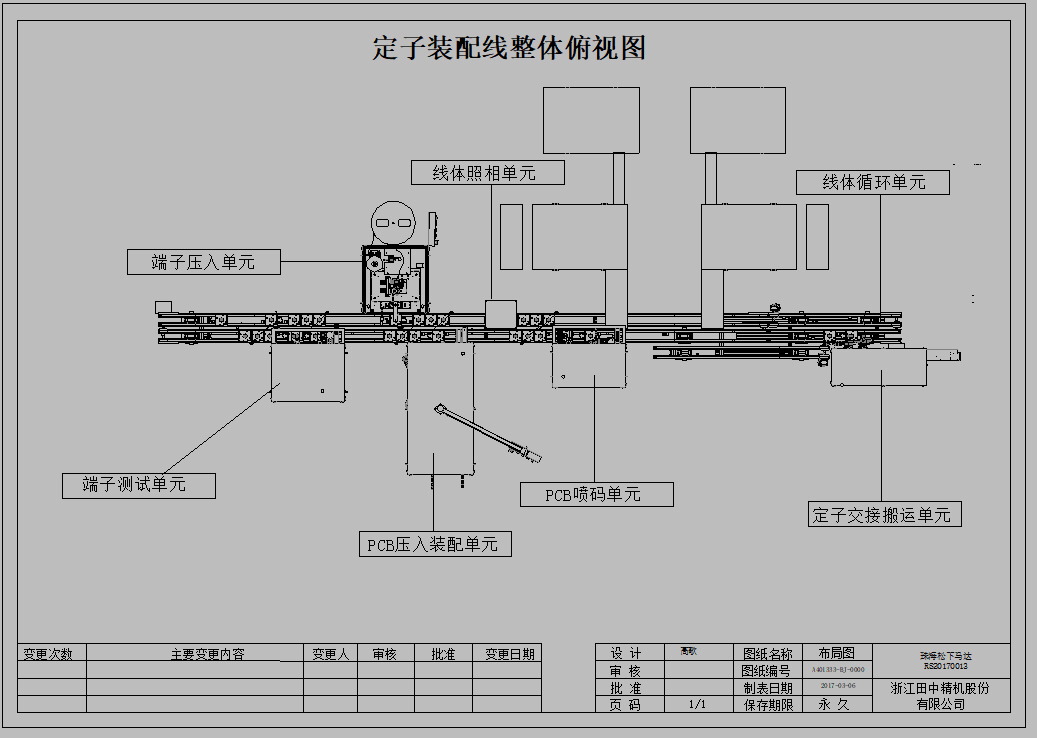
西门子PLC程序 西门子1200PLC程序,配触摸屏程序,IO,BOM,电气图纸,莫风扇定子线端,两台PLC编程,使用西门子V90伺服,ProFinnet通讯,配合雅马哈机器人,康耐视相机,喷码机,三方伺服压机,三方测电阻电压设备等;与其他设备线有交互,程序结构清晰易懂,可作为大型产线的参考程序,对做西门子PLC的电气工程师有一定的帮助。
作为一名电气工程师,我经常需要为各种自动化产线编写PLC程序。最近,我参与了一个较为复杂的项目,涉及西门子1200PLC、触摸屏、IO模块、BOM管理、电气图纸设计,以及与第三方设备如雅马哈机器人、康耐视相机、喷码机、伺服压机和测电阻电压设备的集成。项目中还使用了西门子V90伺服和ProFinet通讯协议,整个系统需要协调多台设备的交互。为了确保程序结构清晰易懂,我总结了一些经验和心得,希望能对其他工程师有所帮助。
1. **项目背景与需求分析**
这个项目的目标是为一条大型产线提供自动化控制解决方案。产线的核心设备包括:
- 西门子1200PLC:作为主控单元,负责逻辑控制和数据处理。
- 西门子V90伺服:用于高精度运动控制。
- 雅马哈机器人:负责物料搬运和装配。
- 康耐视相机:用于视觉检测。
- 喷码机:用于产品标识。
- 第三方伺服压机和测电阻电压设备:用于特定工艺操作。
此外,系统还需要通过ProFinet实现设备间的高效通讯。
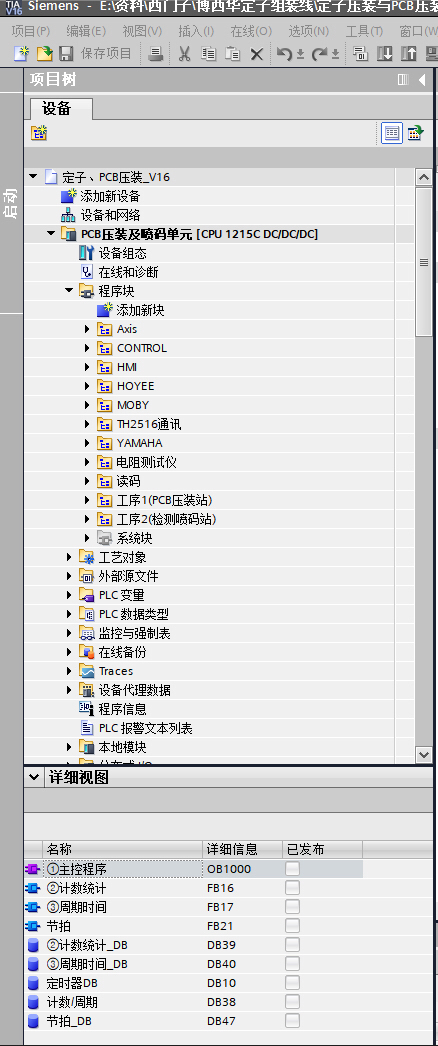
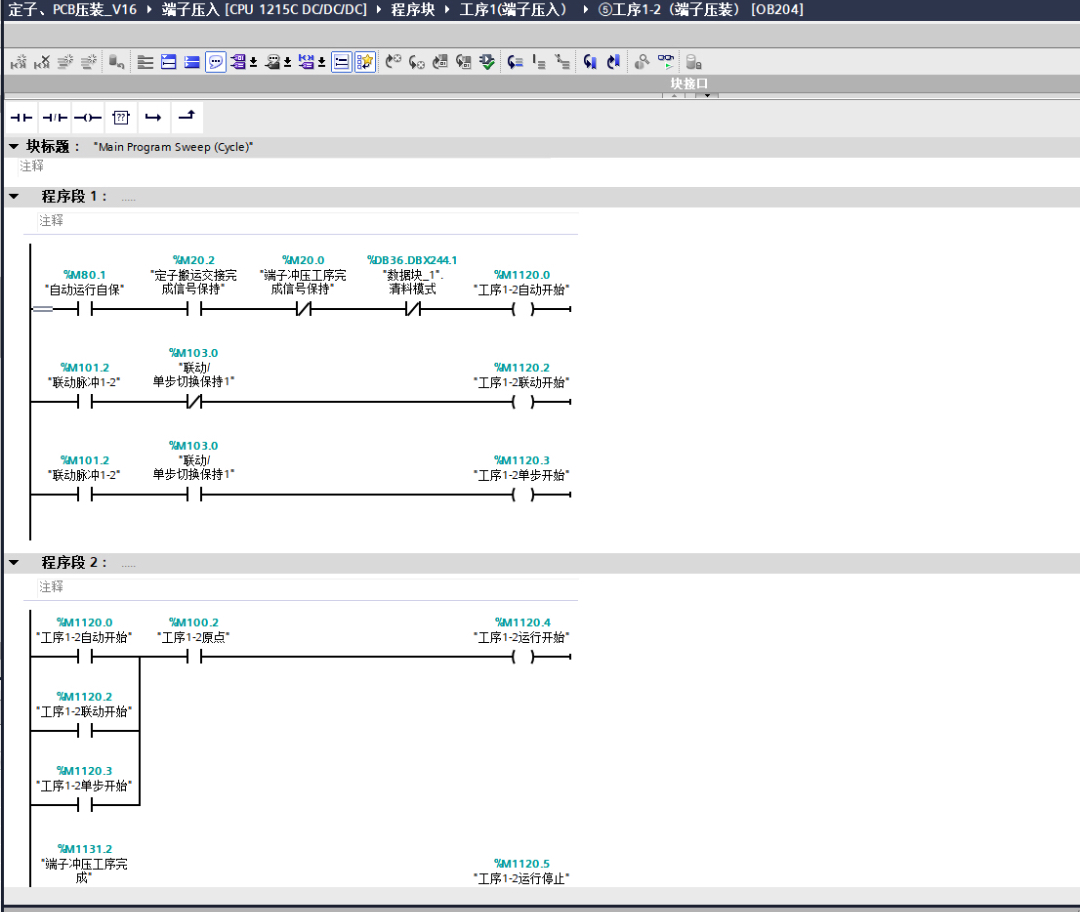
2. **程序结构设计**
为了确保程序的可维护性和可扩展性,我采用了模块化的编程方法。以下是程序的主要结构:
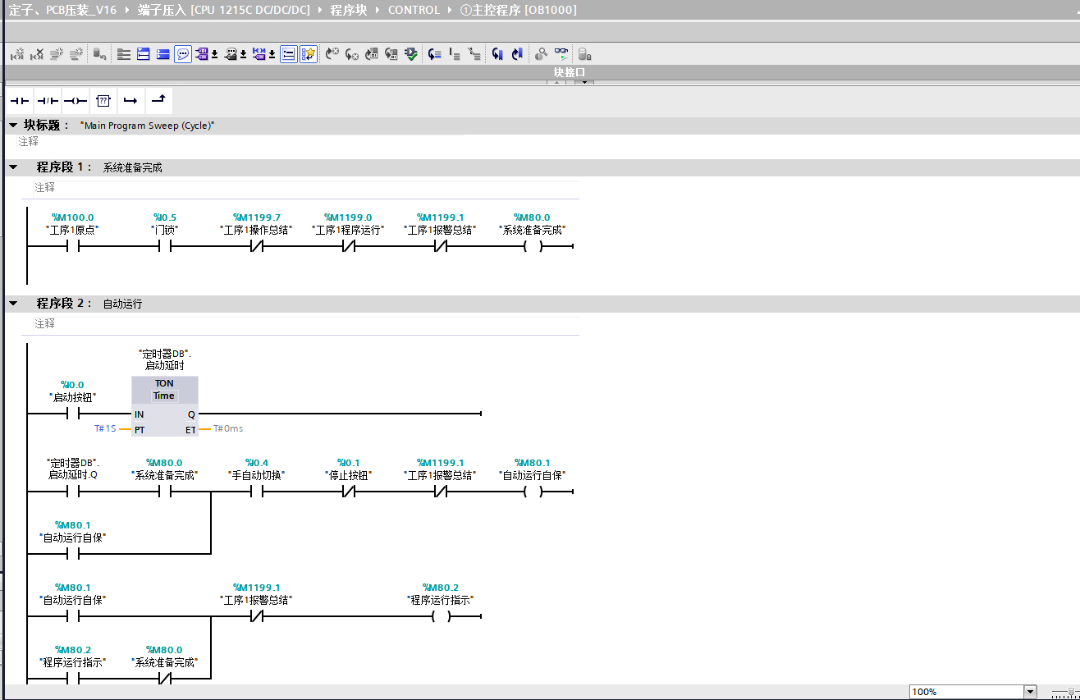
- 主程序 (Main)
- 初始化模块 (Initialization)
- 任务调度模块 (Task Scheduling)
- 故障处理模块 (Fault Handling)
- 子程序 (Subroutines)
- 伺服控制模块 (Servo Control)
- 机器人通信模块 (Robot Communication)
- 视觉检测模块 (Vision Detection)
- 数据采集与处理模块 (Data Acquisition and Processing)分析:
- 主程序:负责系统的初始化和任务调度。初始化模块包括IO配置、伺服参数加载、通讯链路建立等。任务调度模块则根据产线的工艺流程,依次调用各个子程序。
- 子程序:每个子程序负责一个特定的功能模块。例如,伺服控制模块包含伺服的启动、停止、位置控制等函数;机器人通信模块则负责与雅马哈机器人进行数据交互。
3. **关键技术点与代码示例**
3.1 ProFinet通讯配置
ProFinet是西门子PLC常用的通讯协议,用于实现设备间的实时数据传输。以下是ProFinet通讯配置的代码示例:
// 配置ProFinet通讯端口
NET_CONFIG:
NET_ID := '192.168.1.100.1.1'
PORT := 0
TIMEOUT := 100
RETRY := 3分析:
- NET_ID:配置PLC的IP地址和通讯端口。
- PORT:通讯端口号,通常设置为0。
- TIMEOUT:通讯超时时间,单位为毫秒。
- RETRY:通讯重试次数。
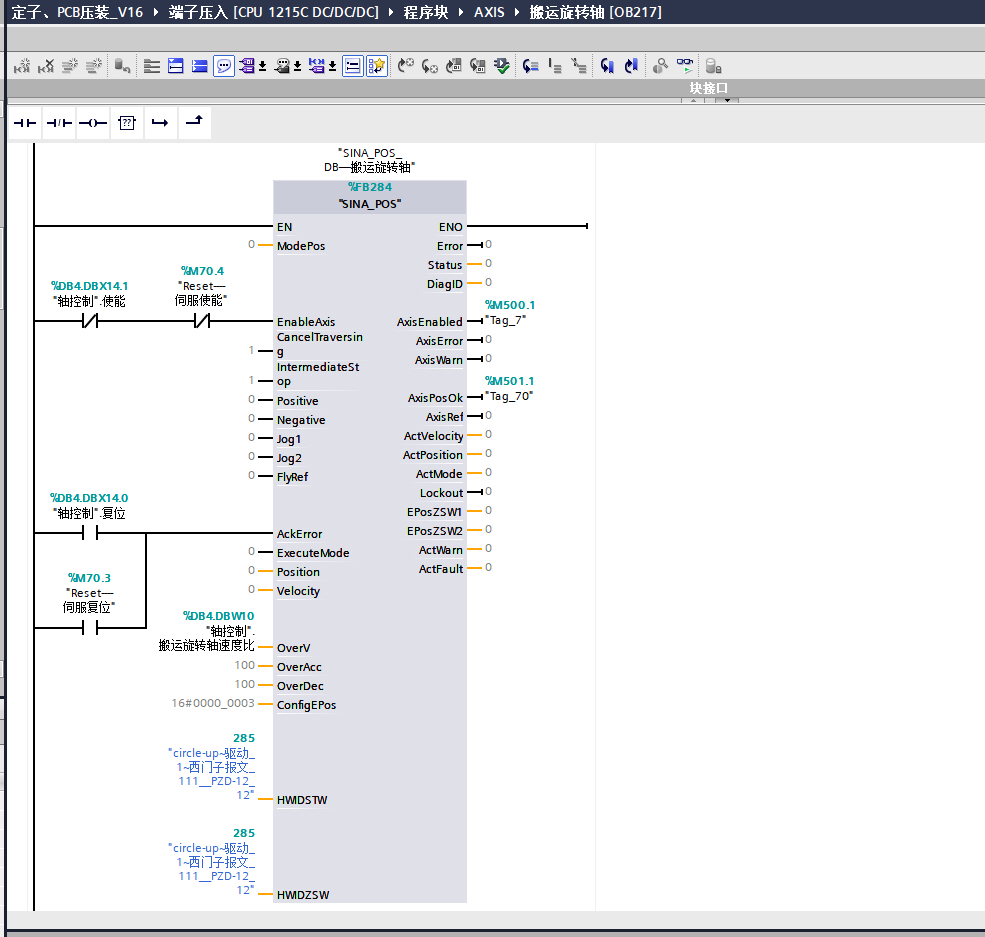
3.2 伺服控制
伺服控制是产线中非常重要的一环。以下是伺服启动和位置控制的代码示例:
// 伺服启动
IF SERVO_ENABLE THEN
SVO_START(1); // 启动伺服
SVO_OPER(1); // 伺服进入操作模式
END_IF
// 位置控制
IF MOVE_REQUEST THEN
SVO_MOVE(1, TARGET_POSITION); // 移动到目标位置
END_IF分析:
- SVO_START:启动伺服电机。
- SVO_OPER:将伺服切换到操作模式。
- SVO_MOVE:控制伺服移动到指定位置。
3.3 机器人通信
与雅马哈机器人的通信需要通过特定的协议实现。以下是机器人通信的代码示例:
// 发送命令到机器人
IF ROBOT_COMMAND_READY THEN
SEND_COMMAND(ROBOT_IP, ROBOT_PORT, COMMAND_DATA);
END_IF
// 接收机器人反馈
IF ROBOT_FEEDBACK_AVAILABLE THEN
RECEIVE_FEEDBACK(ROBOT_IP, ROBOT_PORT, FEEDBACK_DATA);
END_IF分析:
- SEND_COMMAND:向机器人发送控制命令。
- RECEIVE_FEEDBACK:接收机器人的反馈数据。
4. **经验总结**
在开发过程中,我总结了以下几点经验:
- 模块化设计:将程序划分为多个功能模块,有助于提高代码的可读性和可维护性。
- 通讯配置:ProFinet通讯的配置需要仔细检查网络参数,确保设备间的通讯稳定。
- 伺服控制:伺服的启动和位置控制需要严格按照手册操作,避免硬件损坏。
- 机器人通信:与第三方设备的通信需要仔细阅读设备手册,确保协议兼容。
5. **结语**
通过这个项目,我深刻体会到模块化设计和清晰的程序结构在复杂自动化系统中的重要性。希望这篇博文能够为其他电气工程师提供一些参考,帮助大家在开发PLC程序时更加得心应手。如果有任何问题或建议,欢迎在评论区留言交流!
西门子PLC程序 西门子1200PLC程序,配触摸屏程序,IO,BOM,电气图纸,莫风扇定子线端,两台PLC编程,使用西门子V90伺服,ProFinnet通讯,配合雅马哈机器人,康耐视相机,喷码机,三方伺服压机,三方测电阻电压设备等;与其他设备线有交互,程序结构清晰易懂,可作为大型产线的参考程序,对做西门子PLC的电气工程师有一定的帮助。


DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐


 28
28 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)