西门子1200PLC大型项目包膜机程序,气缸,通讯,机械手,模拟量等,各种FB块,可用来参考和...
全站式整厂自动化集中控制程序,新能源行业,2台上下料机器人,控制包括MES系统,程序结构分明,注释详细,有机械结构图,威纶通触摸屏程序,开关机操作,故障处理,机械结构图全写入触摸屏的。全站式整厂自动化集中控制程序,新能源行业,2台上下料机器人,控制包括MES系统,程序结构分明,注释详细,有机械结构图,威纶通触摸屏程序,开关机操作,故障处理,机械结构图全写入触摸屏的。看到那个handshake数组没
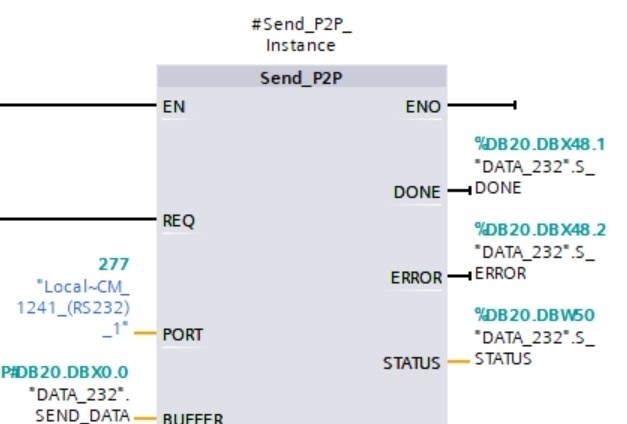
西门子1200PLC大型项目包膜机程序,气缸,通讯,机械手,模拟量等,各种FB块,可用来参考和学习 软件博图,威纶通触摸屏,网络结构可参考图一,PTO控制20多个轴,100多个气缸,控制2台机器人。 5台PLC智能IO通讯,ModbusRTU通讯轮询,完整威纶通触摸屏程序,5台西门子1200PLC+一台1500PLC,是学习西门子PLC通信、伺服、复杂程序如何编写的好帮手,另外附带威纶通触摸屏程序 全站式整厂自动化集中控制程序,新能源行业,2台上下料机器人,控制包括MES系统,程序结构分明,注释详细,有机械结构图,威纶通触摸屏程序,开关机操作,故障处理,机械结构图全写入触摸屏的。 主站和MES系统通讯,1号2号从站和绝缘测试仪器RS-232通讯,4号从站Modbus 总线通讯读取4个智能传感器值,5号从站Modbus 总线和3个温控器通讯
直接上干货!今天拆解的这个西门子1200PLC包膜机项目堪称工业自动化样板间,光是通讯架构就够玩三天三夜。主站1500PLC带着5台1200小弟,ModbusRTU轮询玩得飞起,硬是把20多个伺服轴、100+气缸和两台机器人揉成了个听话的钢铁巨兽。

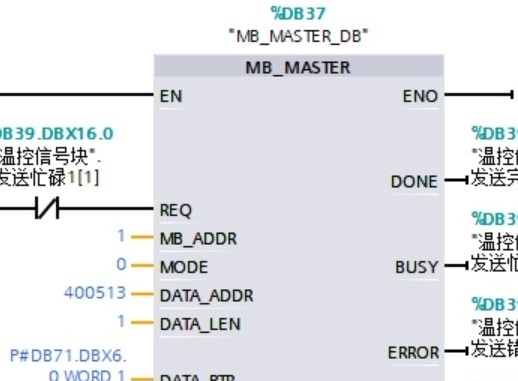
通讯架构这趴必须细品。主站和MES系统搞OPC UA不说,4号从站挂着四个智能传感器玩Modbus总线。来看这段轮询处理的核心代码:
// ModbusRTU轮询FB块
IF NOT #Busy THEN
CASE #Step OF
0: // 读取温控器1
MB_MASTER(REQ:=TRUE, MB_ADDR:=1, ...);
1: // 读取温控器2
MB_MASTER(REQ:=TRUE, MB_ADDR:=2, ...);
// ...其他设备轮询
END_CASE;
END_IF;这货就是个永动机,踩着500ms的定时器节拍挨个点名设备。重点在超时处理——哪个孙子敢不应答,三次超时直接踢出队列,故障灯亮得比迪厅射灯还勤快。
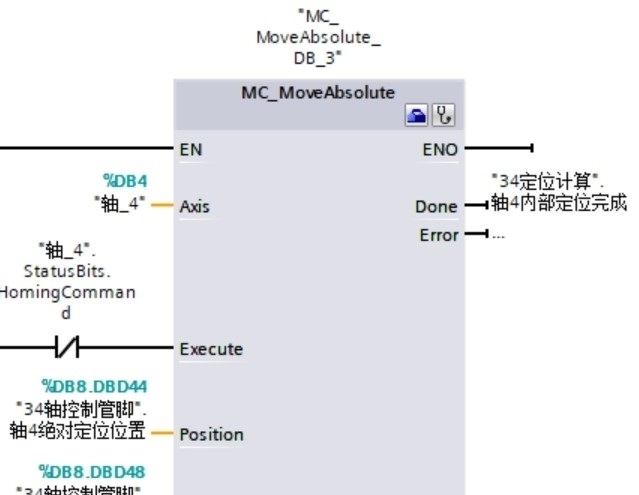
轴控制这块的FB5000块设计绝了,20多个伺服轴参数全打包成UDT。现场调试时发现个骚操作:用PTO脉冲序列控制时,他们竟然把加减速曲线写成了S形函数!代码里藏着这样的黄金:
// 轴参数配置
#AxisConfig.Acceleration := REAL_TO_UINT(SQRT(#MaxSpeed)*10);
#AxisConfig.CurveType := 2; // S型曲线难怪动作平滑得跟德芙似的。FB块里还塞了个隐藏技能——自动相位补偿,听说现场调同步精度时省了80%时间。
100多个气缸的管理才是真·暴力美学。每个气缸单独实例化的FB_Cylinder块里,藏着这样的状态机:
CASE #State OF
0: // 伸出中
IF #Sensor_In THEN
#Timer.TON(IN:=TRUE, PT:=T#2S);
END_IF;
1: // 缩回中
// ...类似处理
2: // 故障态
#FaultCounter := #FaultCounter + 1;
END_CASE;最绝的是故障溯源——每个气缸都自带"病历本",最近五次故障类型和时间戳全记小本本上,触摸屏一点就能翻旧账。
西门子1200PLC大型项目包膜机程序,气缸,通讯,机械手,模拟量等,各种FB块,可用来参考和学习 软件博图,威纶通触摸屏,网络结构可参考图一,PTO控制20多个轴,100多个气缸,控制2台机器人。 5台PLC智能IO通讯,ModbusRTU通讯轮询,完整威纶通触摸屏程序,5台西门子1200PLC+一台1500PLC,是学习西门子PLC通信、伺服、复杂程序如何编写的好帮手,另外附带威纶通触摸屏程序 全站式整厂自动化集中控制程序,新能源行业,2台上下料机器人,控制包括MES系统,程序结构分明,注释详细,有机械结构图,威纶通触摸屏程序,开关机操作,故障处理,机械结构图全写入触摸屏的。 主站和MES系统通讯,1号2号从站和绝缘测试仪器RS-232通讯,4号从站Modbus 总线通讯读取4个智能传感器值,5号从站Modbus 总线和3个温控器通讯
跟机器人打交道的Profinet通讯才叫高端局。两台机器人实时位置数据直接怼进DB块:
STRUCT
Robot1_X : REAL;
Robot1_Status : WORD;
Handshake : ARRAY[1..2] OF BOOL; // 握手信号
END_STRUCT看到那个handshake数组没?这就是传说中的状态机握手协议,防止数据不同步搞得鸡飞狗跳。现场实测通讯周期压到8ms,比某些人的反应速度还快。
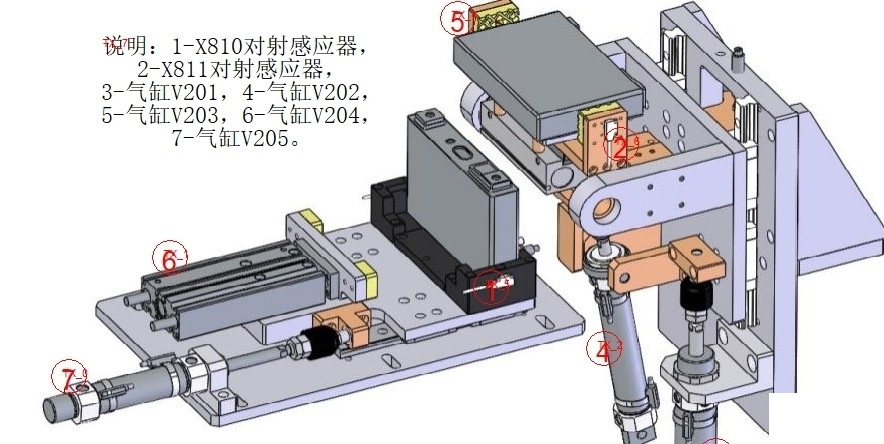
触摸屏程序才是真·降维打击。直接把机械结构图烧进威纶通,配合动画脚本整得跟科幻片操作台似的。那个故障树功能简直了——点哪个气缸直接三维模型高亮,连带气路图都给你标红,维修工看了直呼内行。
MES对接这块的骚操作更离谱。他们把生产数据打包成JSON字符串,走TCP/IP直怼MES数据库。代码里藏着个Base64编码器,听说是不想让甲方运维人员随便改数据:
// 数据上报函数
CALL "Data_Encode",
In:=#ProductionData,
Out=>#EncodedData;
MB_CLIENT_WRITE(..., DATA:=P#EncodedData);项目里还埋着不少彩蛋,比如温控器的PID参数自整定算法,居然用到了梯度下降法。绝缘检测模块的RS232通讯处理更是玩出花——自动波特率识别+奇偶校验动态切换,现场什么妖孽设备都能怼上去。
要说学习价值,这个项目最牛逼的是把工厂级自动化拆成了乐高模块。每个FB块都是独立技能包,注释详细到连电磁阀寿命计数器这种细节都没放过。想练级通讯编程的,五台PLC的智能IO组网够你玩半个月;要钻研运动控制的,20多个轴的同步策略能写出三篇论文。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐


 1
1 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)