机器人开发实战
1.道路识别
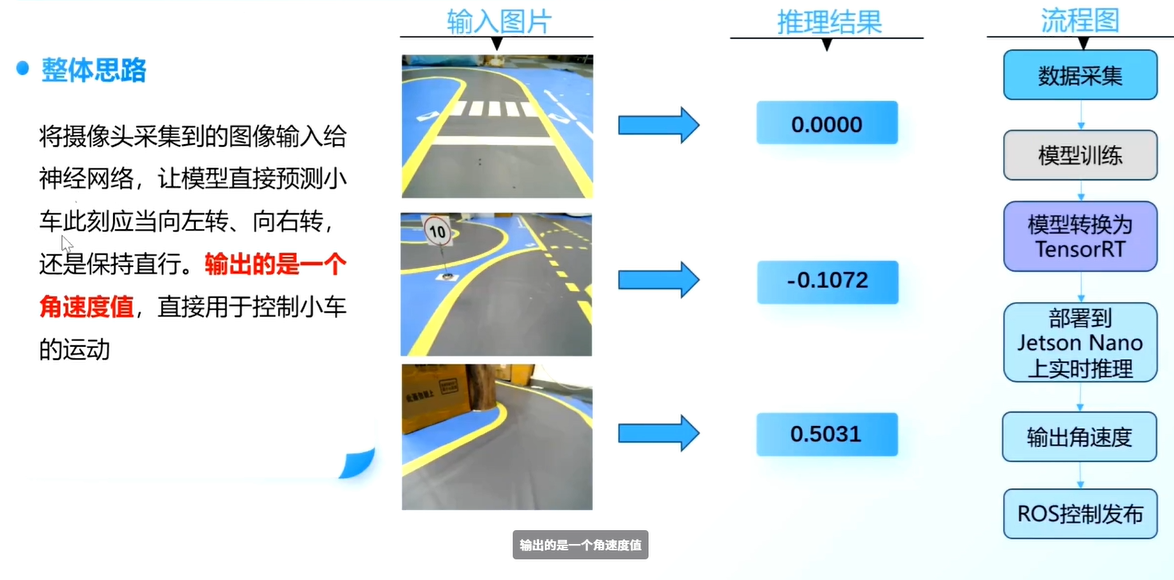
1.端到端车道线检测
2.交通标志检测
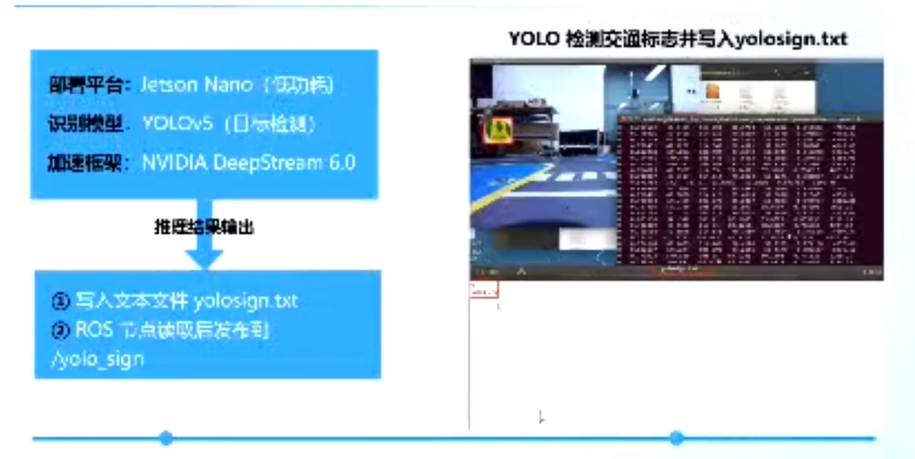
整体流程
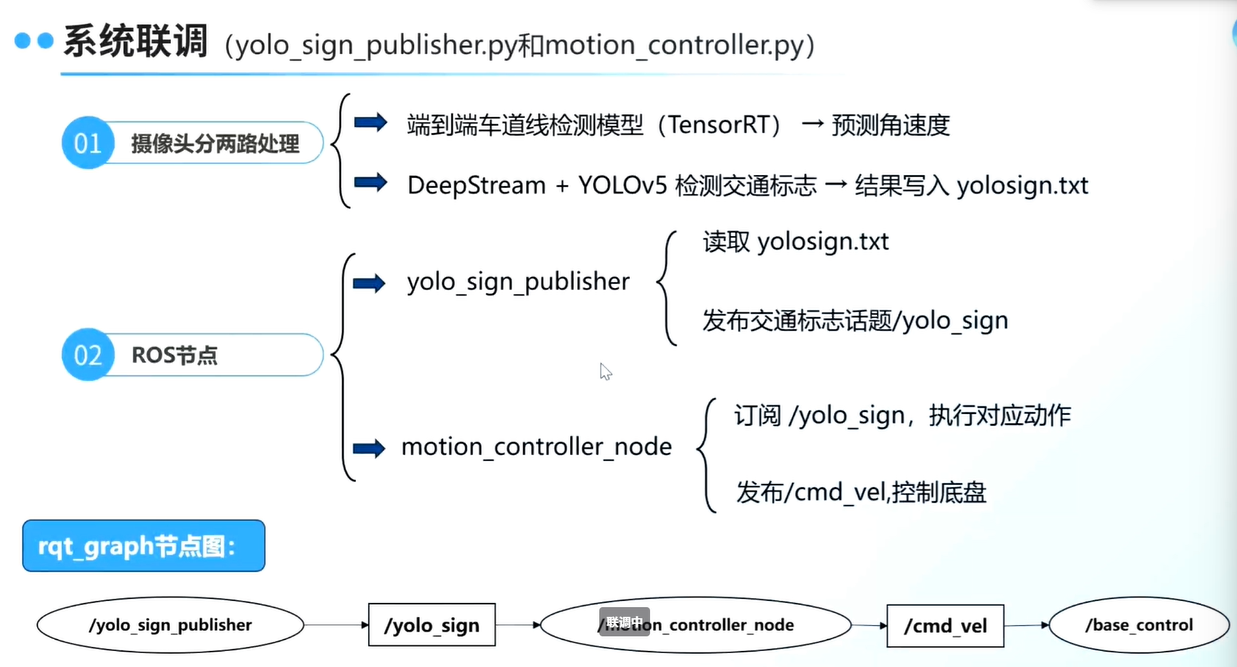
3.系统联调与动作处理
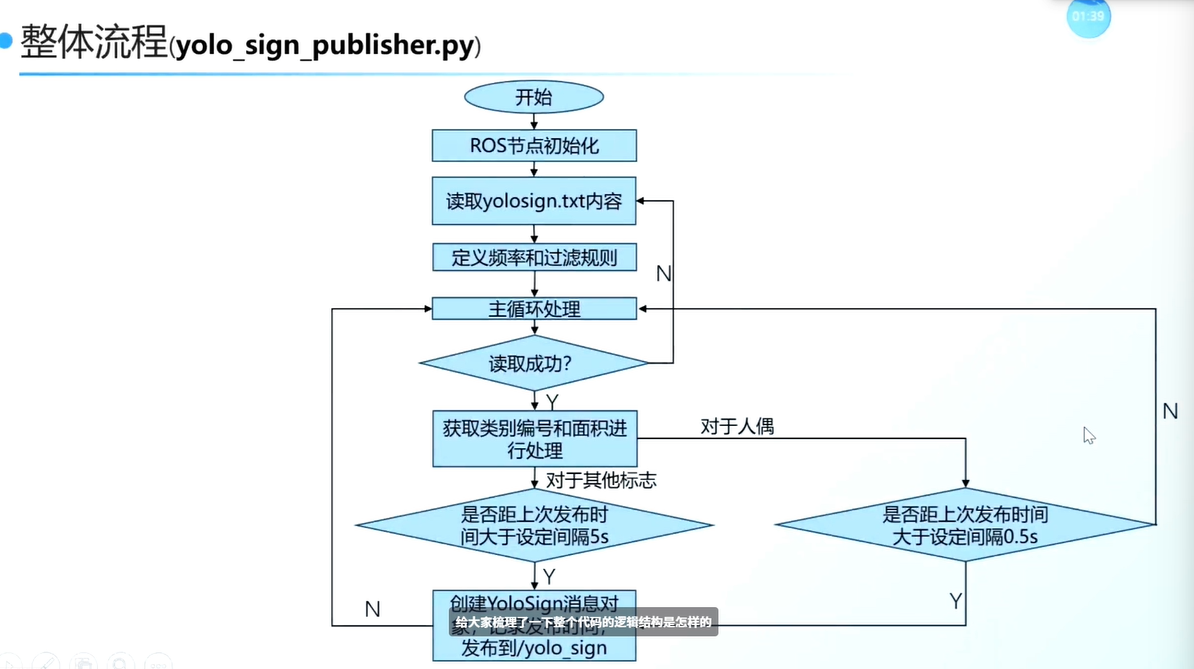
代码整体流程
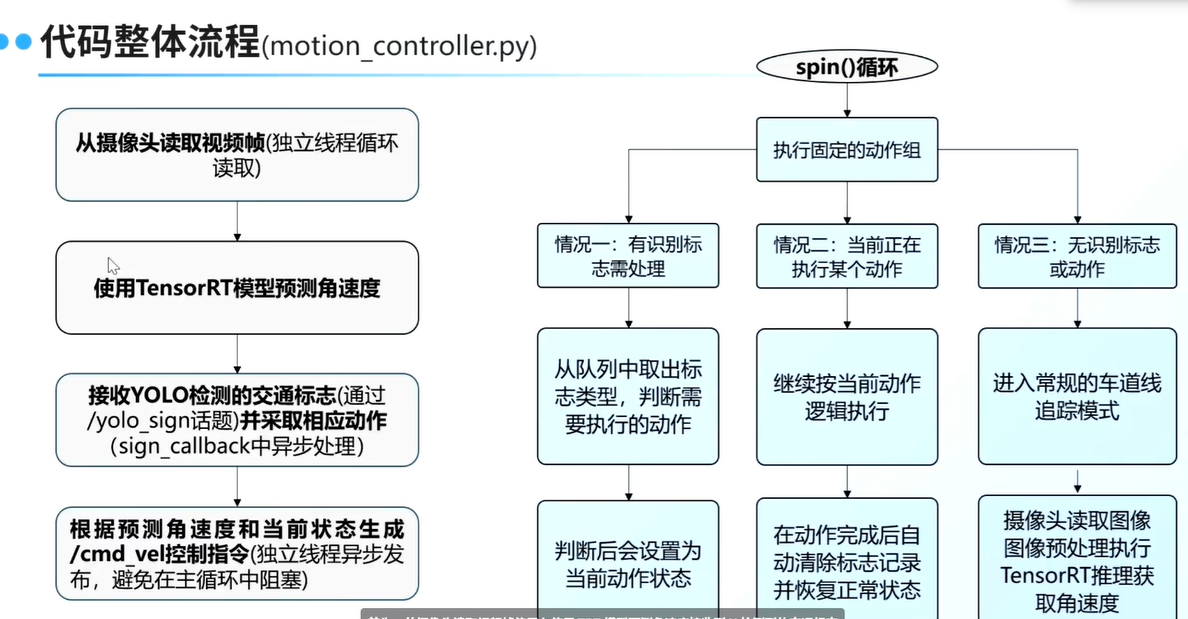
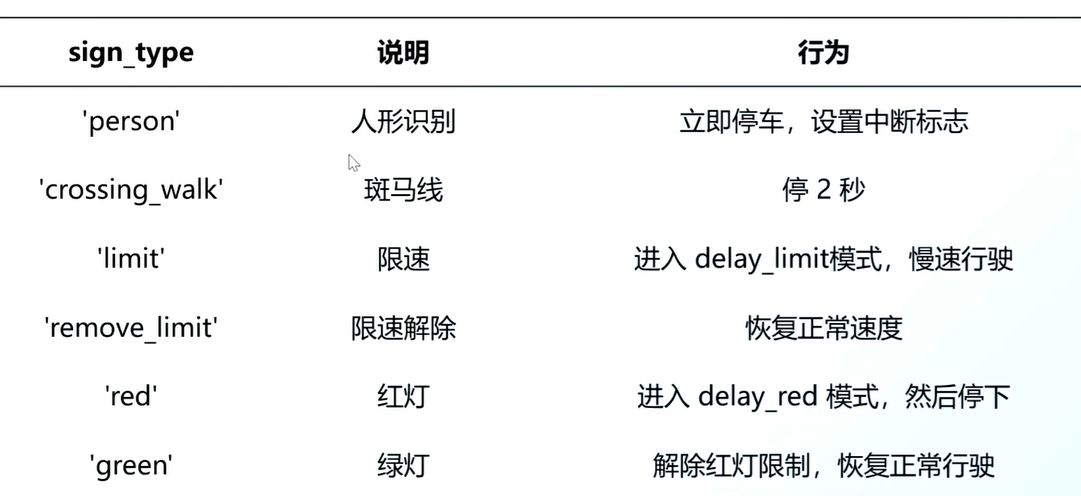
处理动作
运行代码

2.农业机器人
1.使用远程ssh连接

在连接机器人前请安装MobaXterm
2.使用
1.连接小车wifi
2.启动MobaXterm,输入小车对应ip地址和用户名,选择连接
3.软硬件组成
1.底层控制
1.键盘控制移动
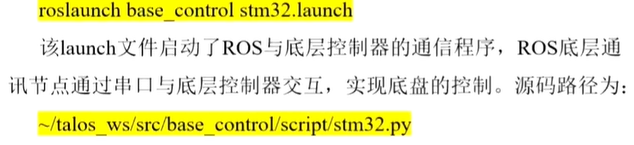
1.打开一个终端,运行以下指令,启动小车的底层驱动
2.再打开一个终端,可查看底盘相关的ROS话题(若不需要相关话题则跳过)输入: rostopic list
3.另外打开一个终端
![]()
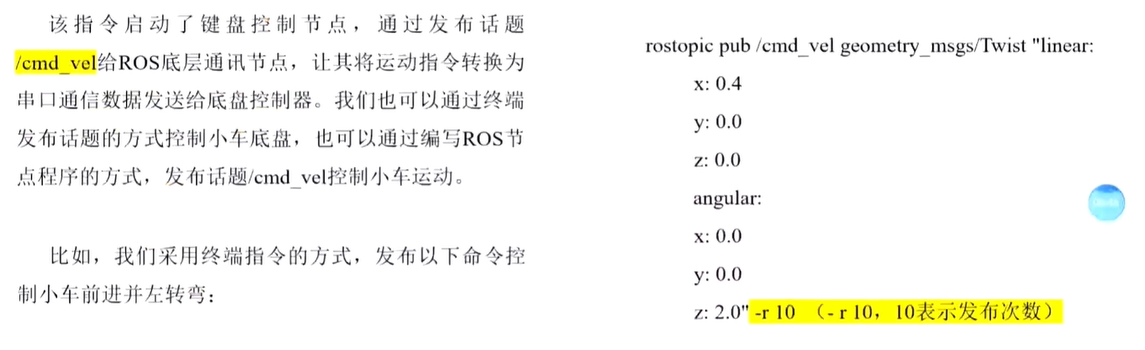
其中linear.x代表小车的直行速度,angular.z代表小车的转弯速度,无论指令或是程序,均通过以两个数据控制小车底盘的运动方式
4.雷达测试
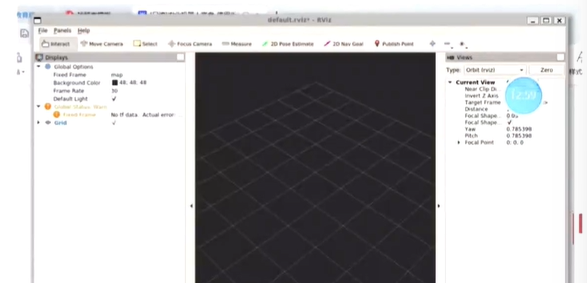
![]()
另外打开一个终端输入rviz,进行如下图选择。若无雷达点云出现,请检查硬件连接是否正常,正常情况下开机雷达自动商店,会出现蓝色圆形灯在雷达处闪烁
1.首先在底部点击add然后选择LaserScan添加
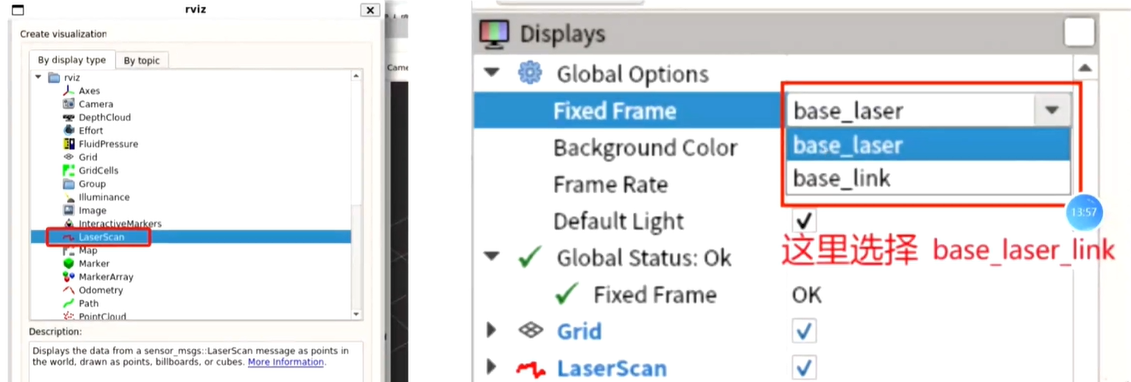
2.rviz雷达数据可视化显示
3.终端雷达数据订阅
新开一个终端输入:rostopic echo/scan
4.小车两侧雷达数据获取
此时可以运行以下程序:python get_scan_data.py获取激光雷达扫描到的小车两侧最 短距离数据,并打印
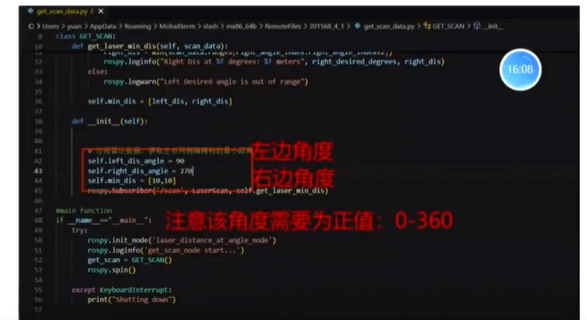
5.自定义角度距离python get_scan_data.py源码数据修改如下
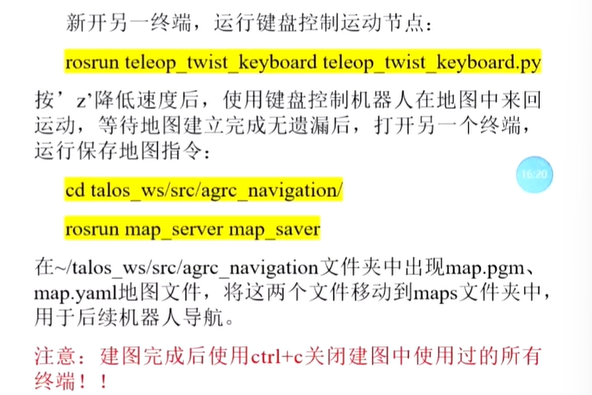
6.雷达建图

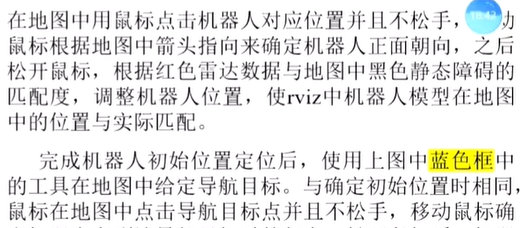
7.使用地图二维导航

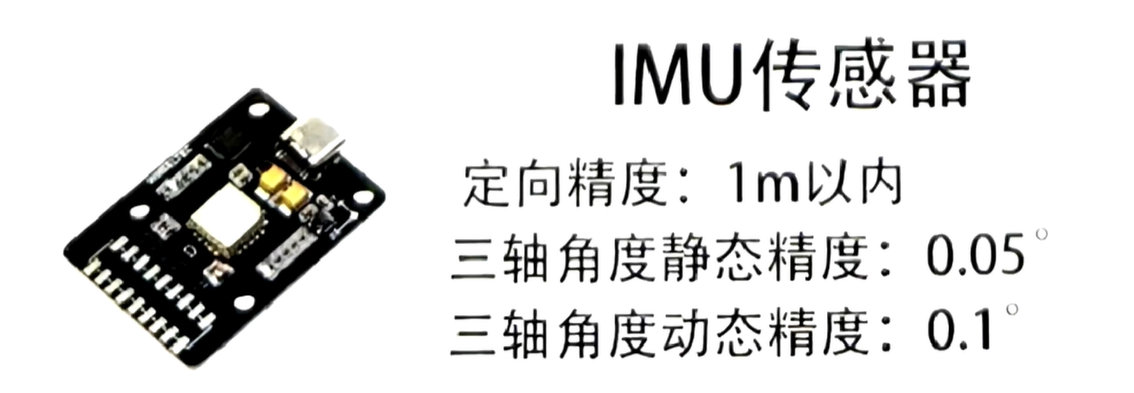
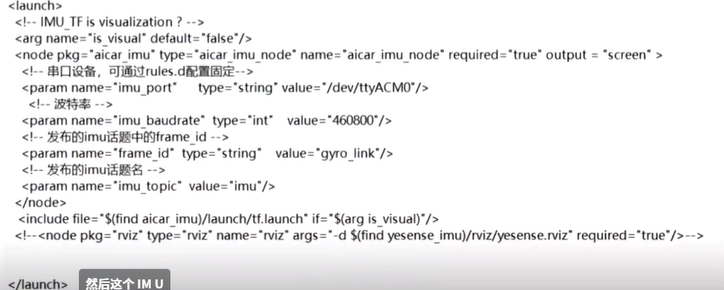
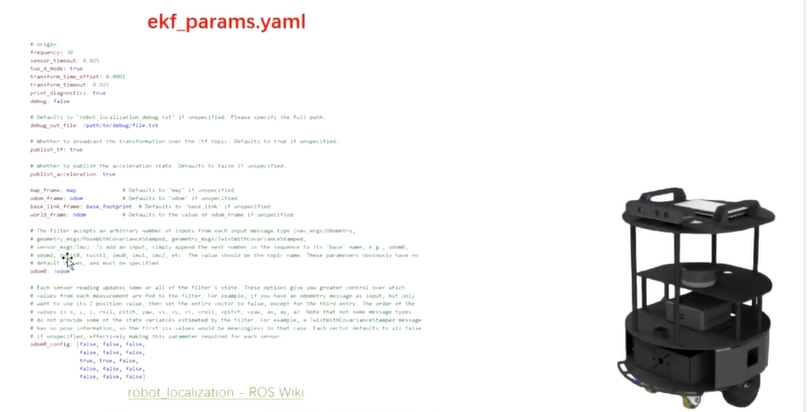
2.IMU数据获取

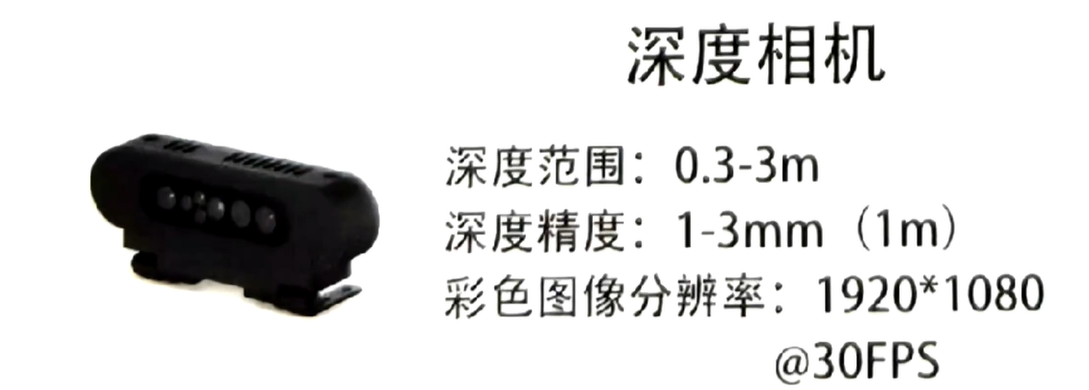
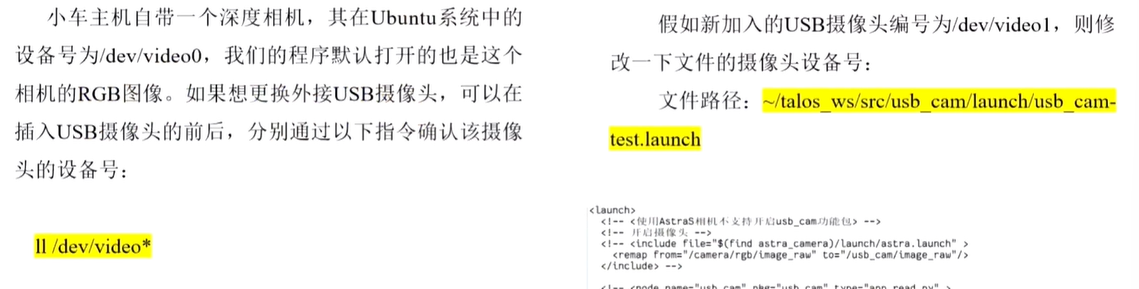
3.深度相机数据获取
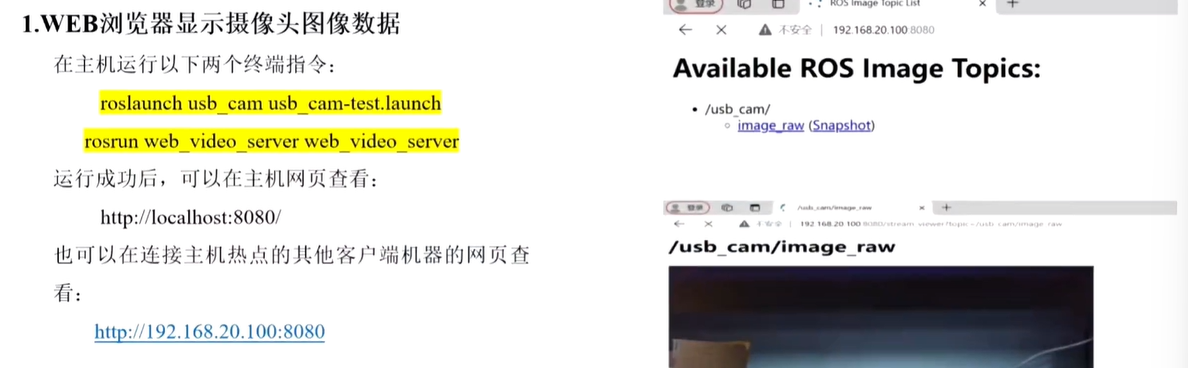
1.WEB浏览器显示摄像头图像数据
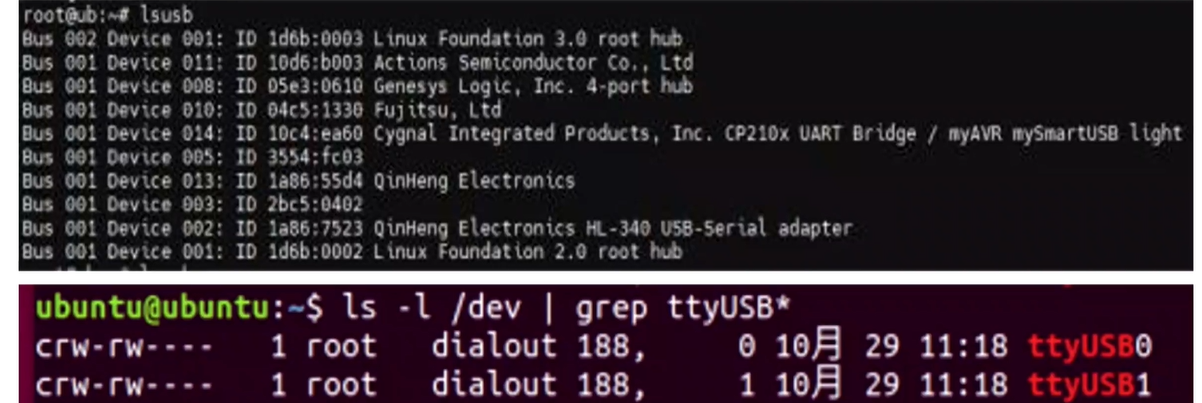
2.传感器串口绑定
先输入ls查看串口号,编码,映射,也可通过ls -l/dev查grep ttyusb都映射到那个名称下它的对应的规则
3.机械臂控制

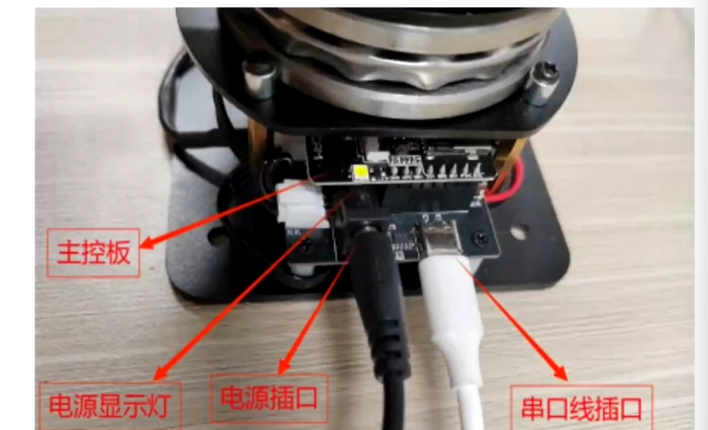
注:串口线插口要保证稳定,电源插口要保证没有外物干扰的情况下在插电,否则复位时会导致机械臂碰到其他障碍物或损坏,主控板电压为12伏
注:机械臂需要插在串口上,可用小车或12伏电源供电
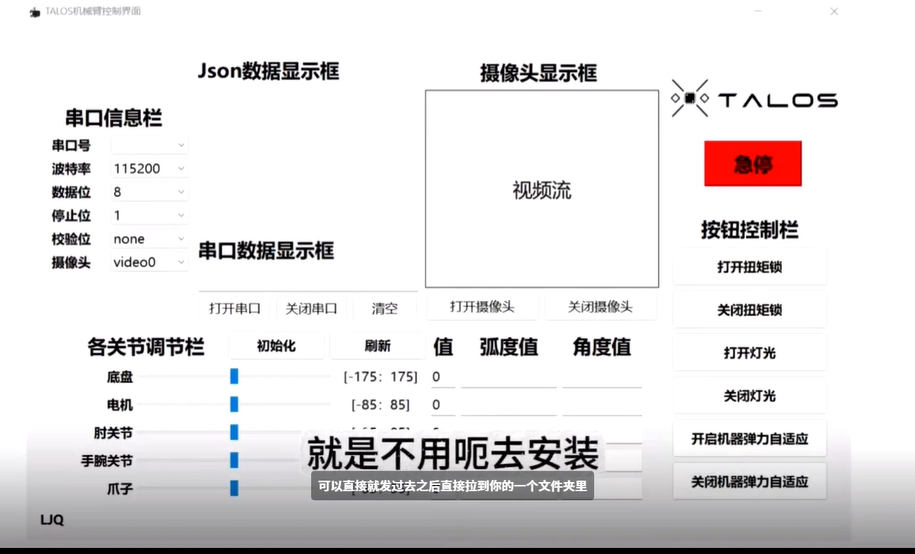
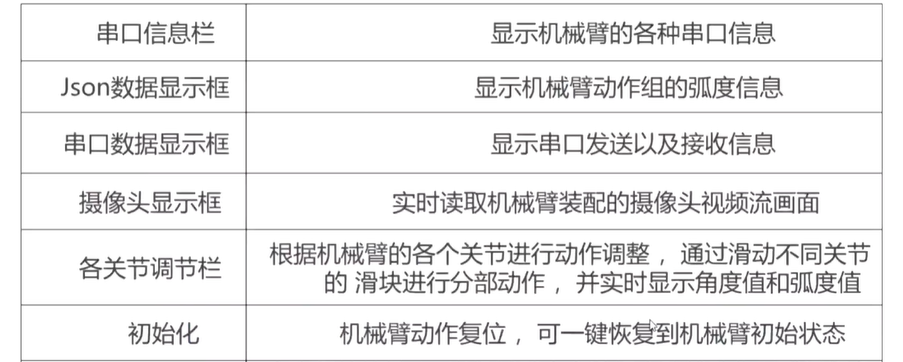
各模块功能介绍
急停:安全保护案件,当机械臂未安装规定路线动作时或遇紧急突发情况时,可及时按下暂停 按钮停止动作,防止意外发生
按键控制栏:不同按钮对应机械臂的不同功能,实现一键控制
注:爪子调节角度不宜过大,易把舵机烧坏,不要一下滑到底
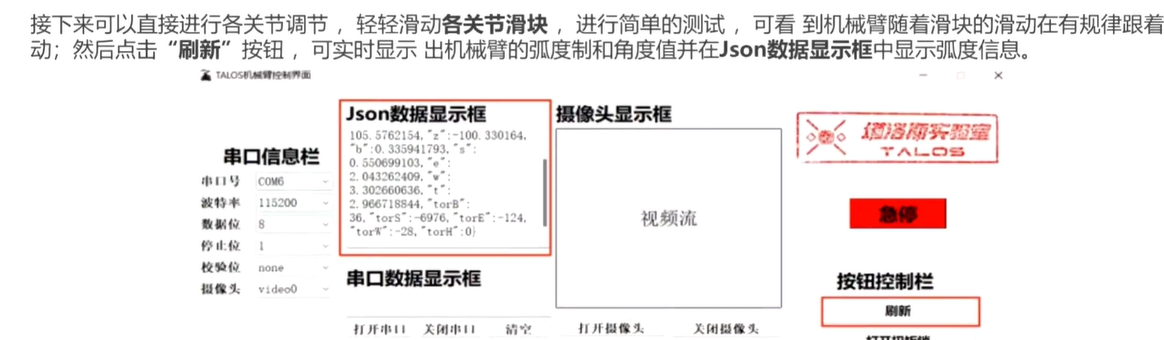


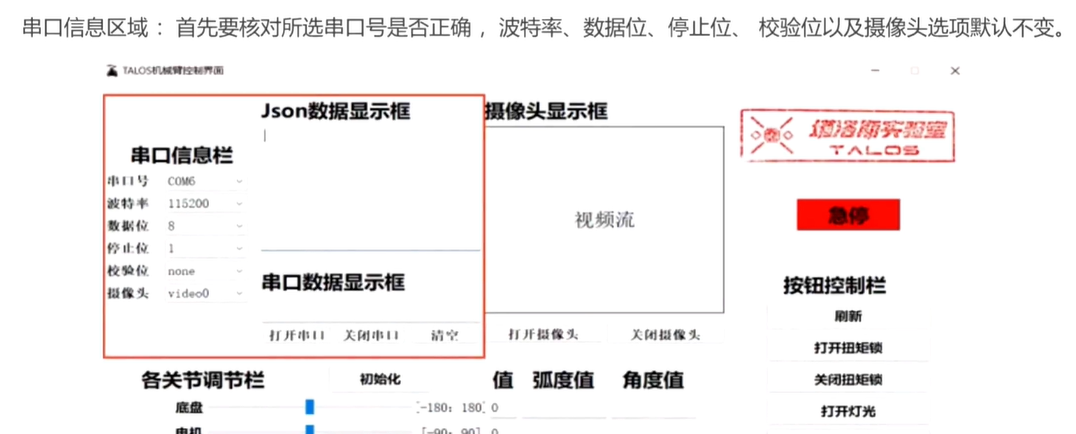
4.机械臂软件控制程序

3.药房机器人
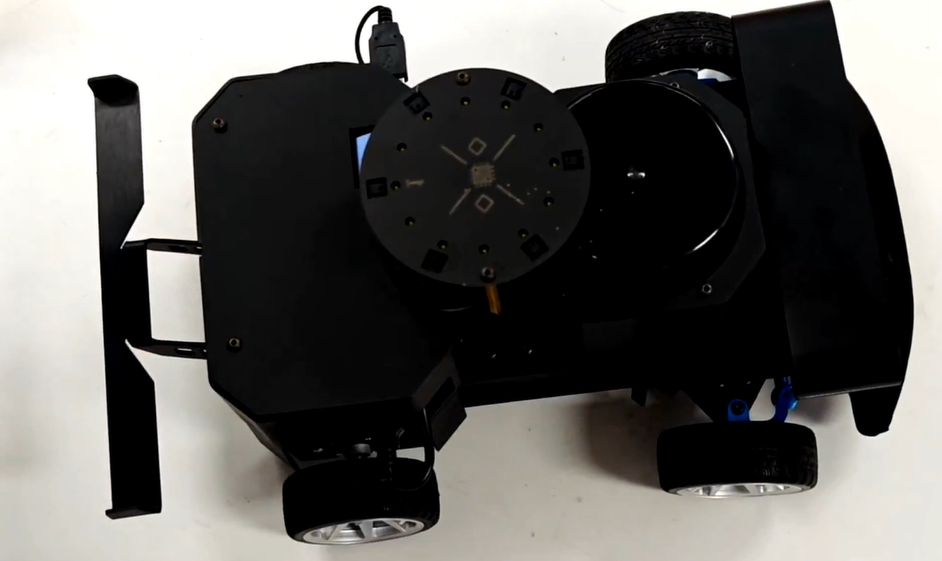
小车示意图
1.拆解
1.工具:PH1螺丝刀,2mm六角扳手
2.详细过程
1.翻到小车后头,有一个电池仓,使用PH1螺丝刀即可进行拆解
2.可通过图中的口来插拔电池

3.麦克风直接进行拆除(请在拆除时金策内六角扳手是否完全插入螺丝)
拆除成功后按下图接口拔下即可

4.移除车的上板
5.对单片机板进行移除

注:图中分别为仅供电USB(为上方喇叭进行供电),开关接口,空接口,电池接口,雷达接口
6.移除车辆金属板(注意检查USB接口是否移除)
3.拼装小车,按拆解的相反步骤拼装完成
4.注意事项
1.若无法分辨电源线和开关线,可用万用表测量
2.将开关线,接入到靠近USB一侧,另一根线接入BAT接口
3.按下开关,若上层办出现反映,则安装正确
4.检测底板是否出现反映,仅需扭动前轮,按下开关,前轮自动归位则正确
5.麦克风话筒需朝上,如下图

5.常见问题及解决方案
1.若车在行驶过程中时斜着走,因为车前面拉杆松动,导致车辆行进方向不平行
解决方案:开机,将前轮自动复位,检查前轮是否与车身平行
2.若左右轮不平衡,可将车辆反转过来,可通过在轮子中间的拉杆,在车关机的情况下用手拨到 另一侧,将下图的螺丝拆下,将这跟拉杆向一侧或另一侧拧动几圈,让前轮恢复平行,螺丝拧开后开机,再直接观察这个车辆的前后轮和车身是否平行

4.智能服务机器人
1.硬件部分
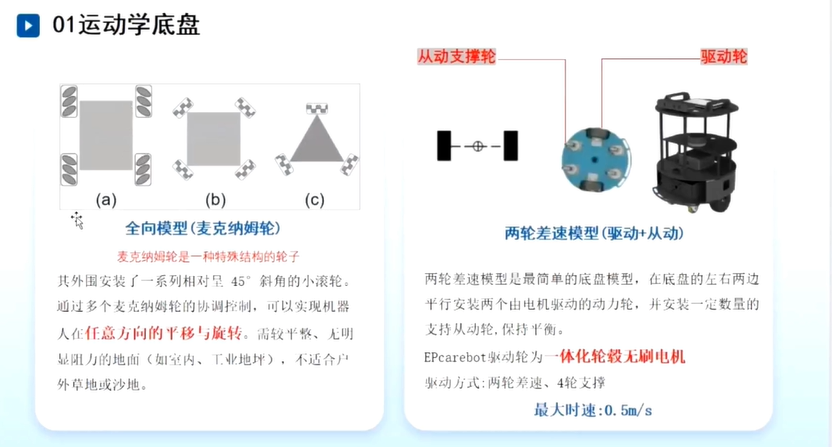
1.运动学底盘

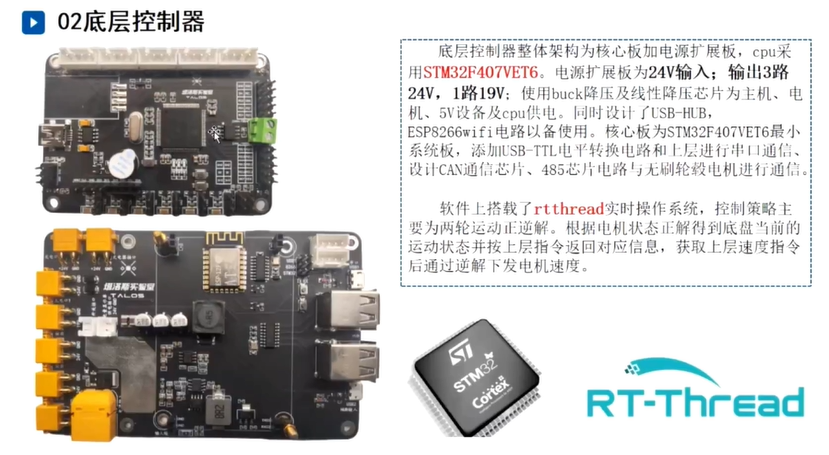
2.底层控制器

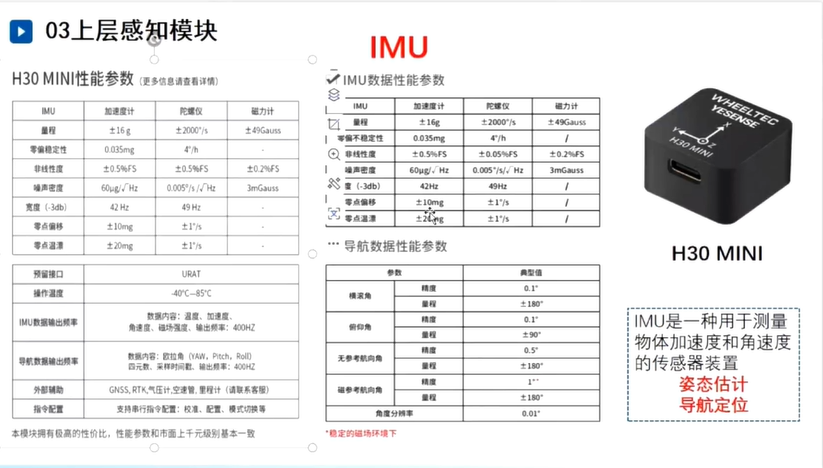
3.上层感知模块

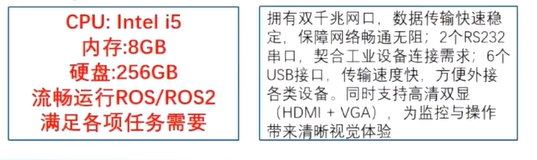
4.电脑硬件需求
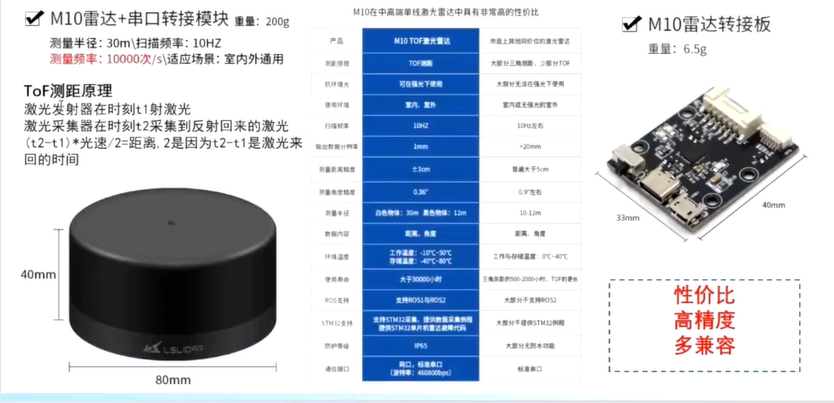
5.M10雷达+串口转接模块
6.IMU
7.麦克风阵列

2.软件部分
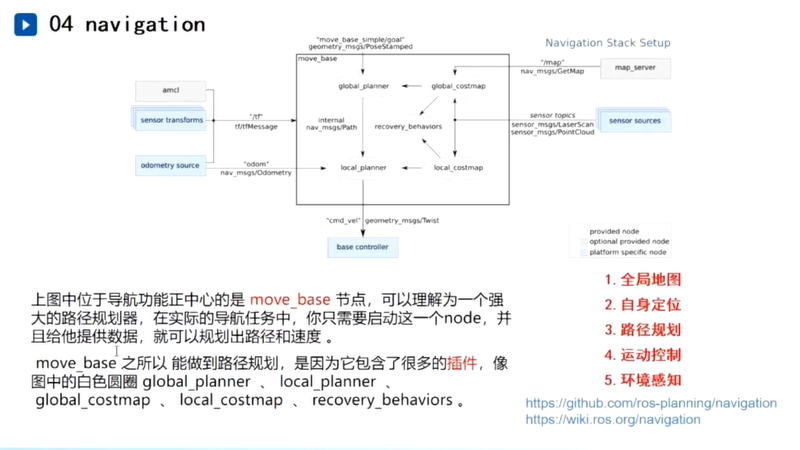
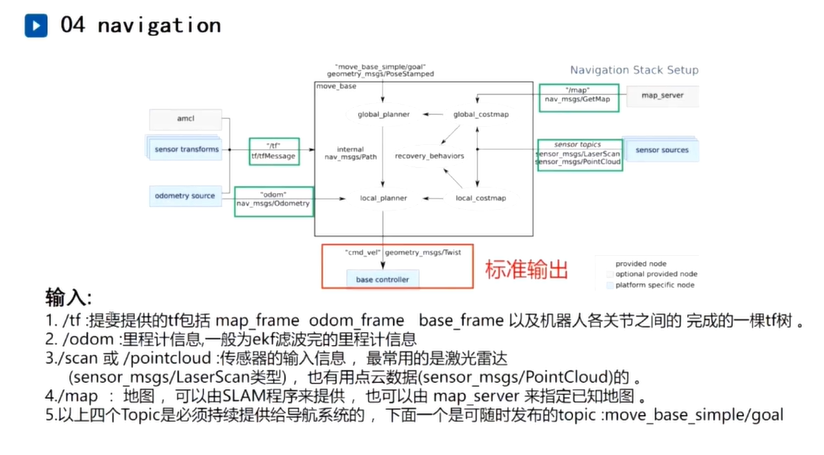
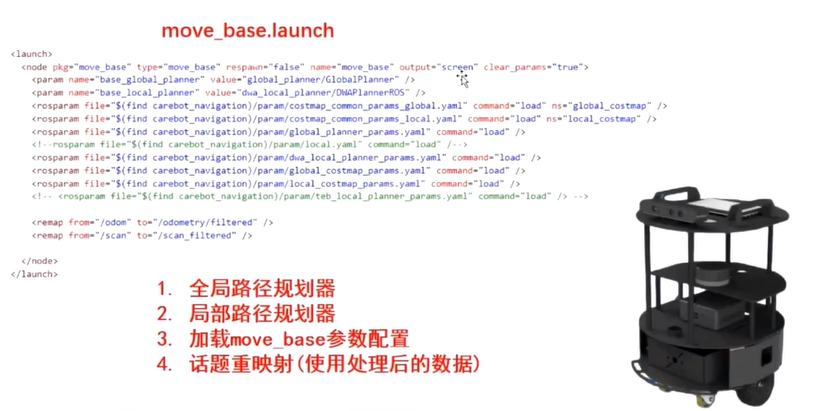
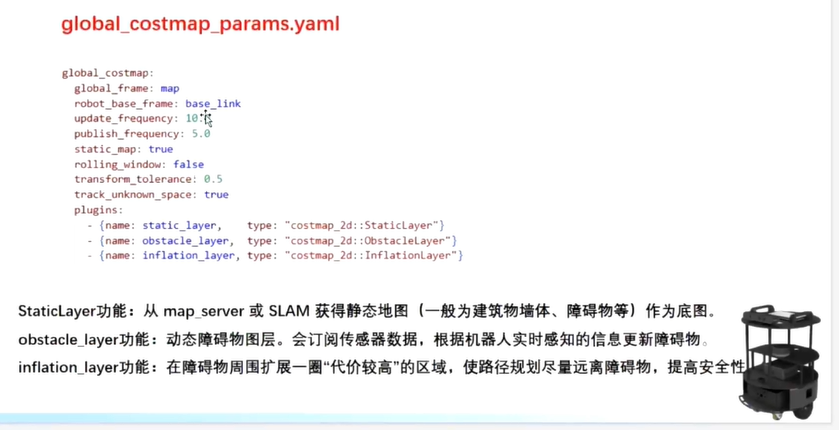
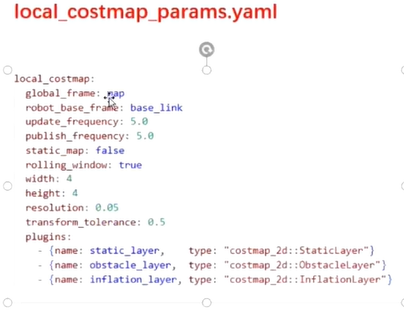
1.navigation

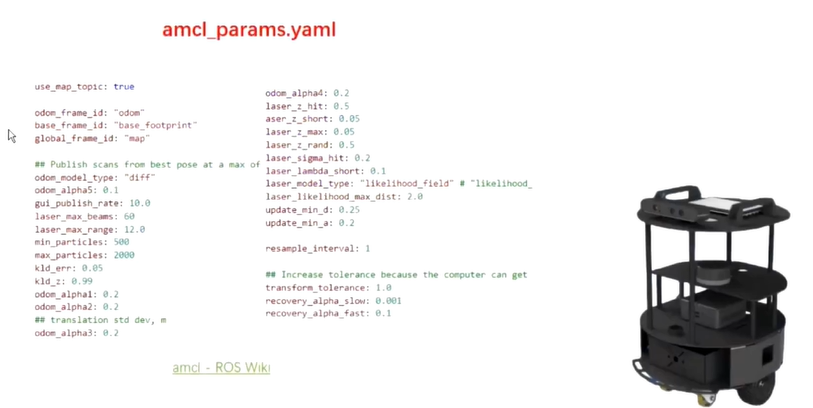
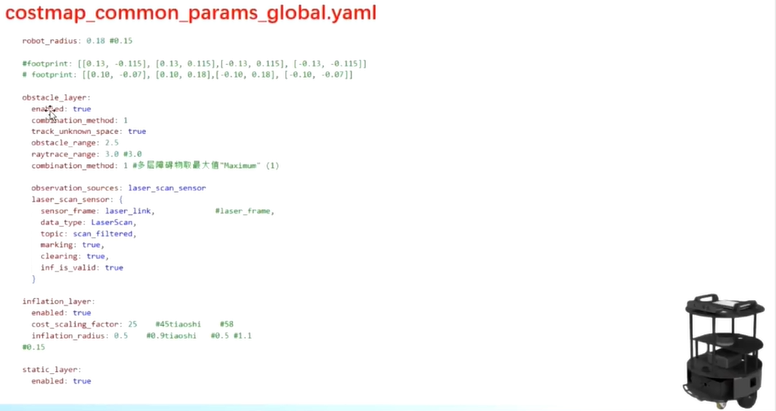
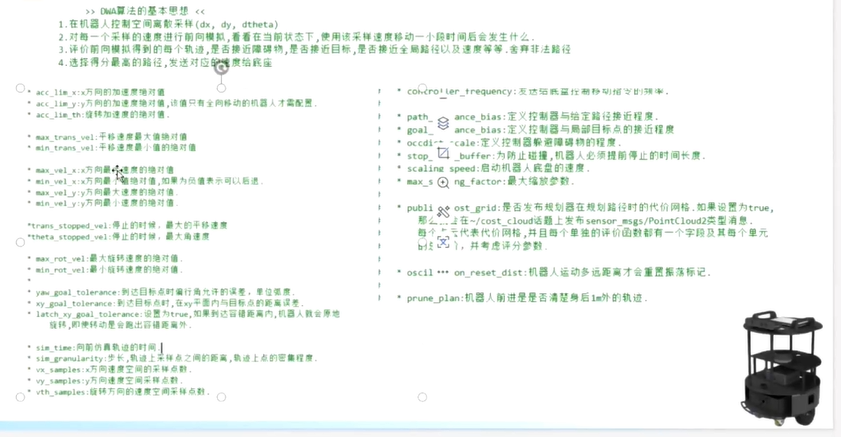
2.路径规划参数优调
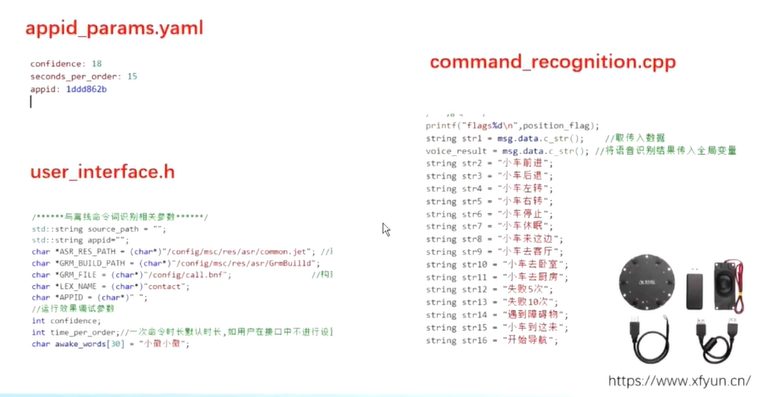
3.语音交互
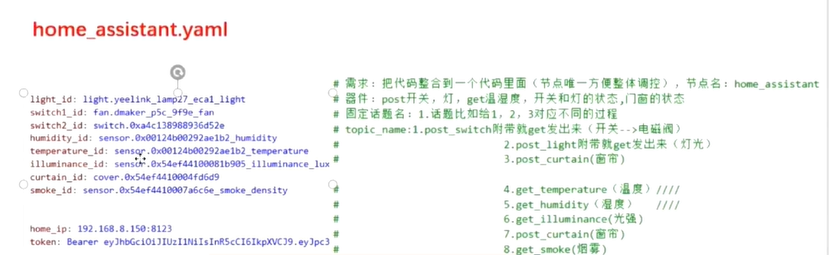
4.只能家居控制

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐
 6
6 0
0- 0



 已为社区贡献4条内容
已为社区贡献4条内容

所有评论(0)