机器人研究 LQR 控制数模实验:从碰壁到高效的探索之旅
机器人研究数模实验方案LQR控制,m函数调用simulink中的控制算法,在simscape Multibody中的物理模型中测试。 跑通模型花了很多时间,这个能帮你节省下时间。 方法适合所有机器人研究,机械臂、无人机,无人车的镇定、轨迹追踪控制算法,有sw模型就可以搭建仿真平台。 LQR跑通比PID麻烦,需要调用基于模型的m函数和计算黎卡提方程。 最后一个图里随便写了几个参数结果也还是不错的
在机器人研究领域,数模实验是验证和优化控制算法的关键步骤。今天就来聊聊我在做机器人研究数模实验方案中关于 LQR 控制的那些事儿,希望能帮大家少走些弯路。
实验流程与关键步骤
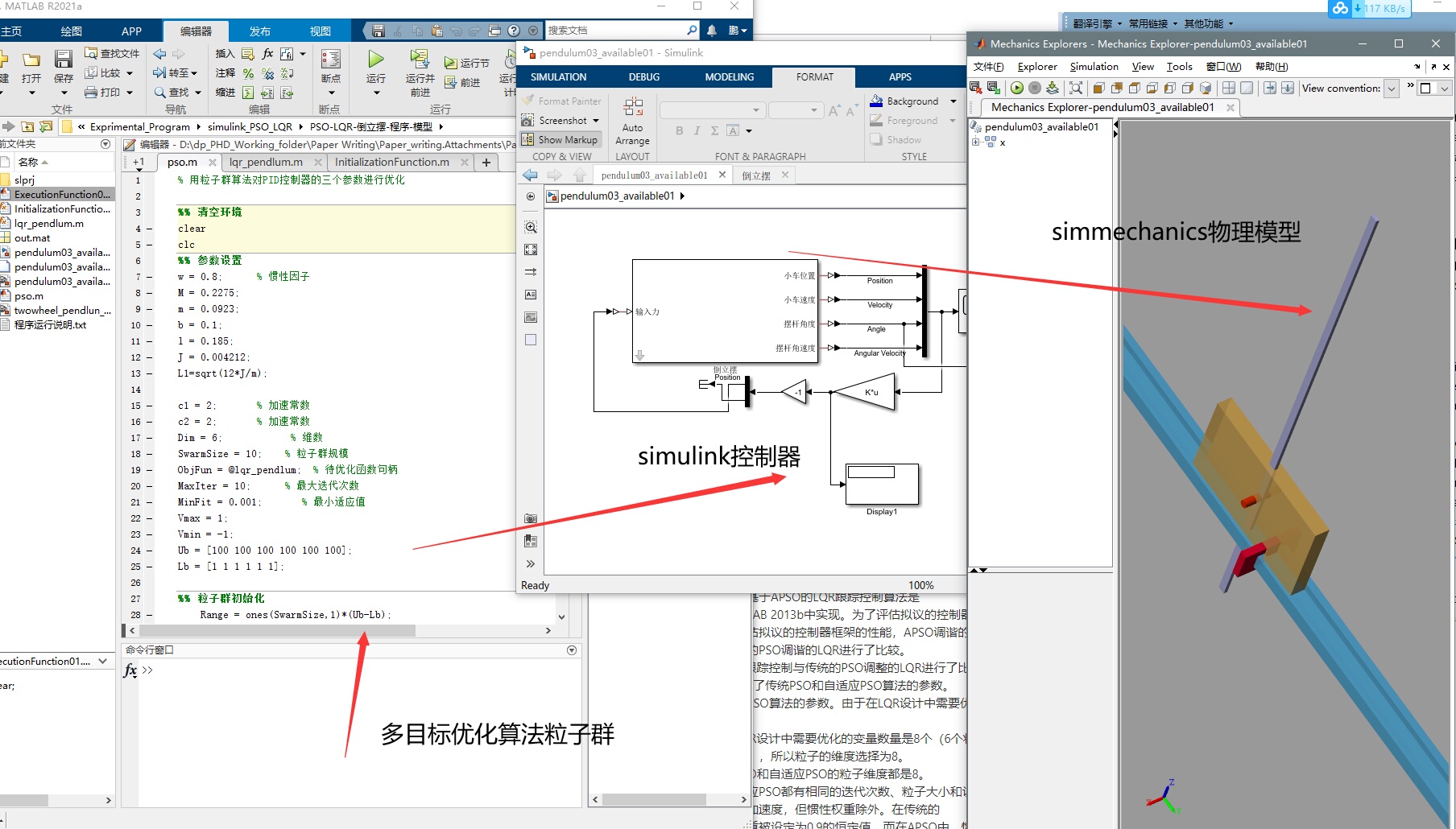
这次实验主要是通过 m 函数调用 simulink 中的控制算法,然后在 simscape Multibody 的物理模型里进行测试。你别说,跑通这个模型可花了我老多时间了,所以下面分享的内容,绝对能帮你节省不少精力。
m 函数调用 Simulink 控制算法
在 Matlab 环境下,我们可以通过编写 m 函数来调用 Simulink 里搭建好的控制算法模型。比如说,假设我们已经在 Simulink 搭建好了一个简单的机器人运动控制模型,我们可以这样在 m 函数里调用它:
function [] = run_simulink_model()
% 模型名称
model_name = 'your_simulink_model_name';
% 加载模型
load_system(model_name);
% 设置仿真参数
simset('SrcWorkspace','current');
% 运行仿真
simout = sim(model_name);
% 这里可以根据仿真结果进行进一步处理,比如绘图等
end这段代码的核心就是先用 load_system 加载我们在 Simulink 中创建好的模型,然后设置仿真工作空间为当前工作空间,最后使用 sim 函数来运行仿真。这样就实现了 m 函数对 Simulink 控制算法的调用。
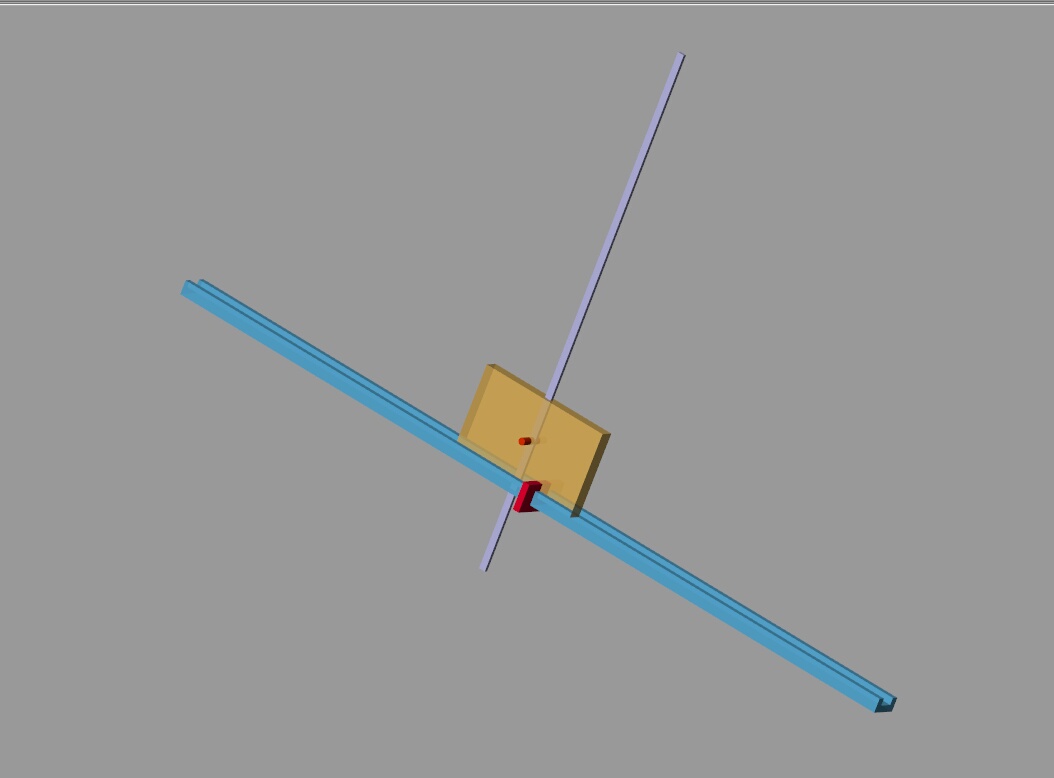
在 Simscape Multibody 物理模型测试
Simscape Multibody 为我们提供了非常逼真的物理建模环境,方便我们对机器人的实际运动进行模拟。在搭建好物理模型后,将之前调用的控制算法接入到物理模型中对应的输入端口,就可以开始测试了。这一步就像是给机器人的大脑(控制算法)接上了身体(物理模型),让它真正“动”起来。
LQR 与 PID 的较量:LQR 的独特挑战
大家都知道,PID 控制算法相对来说比较容易实现和调参。但 LQR 可就不一样了,它跑通可比 PID 麻烦不少。
机器人研究数模实验方案LQR控制,m函数调用simulink中的控制算法,在simscape Multibody中的物理模型中测试。 跑通模型花了很多时间,这个能帮你节省下时间。 方法适合所有机器人研究,机械臂、无人机,无人车的镇定、轨迹追踪控制算法,有sw模型就可以搭建仿真平台。 LQR跑通比PID麻烦,需要调用基于模型的m函数和计算黎卡提方程。 最后一个图里随便写了几个参数结果也还是不错的
LQR(线性二次型调节器)需要调用基于模型的 m 函数,而且还得计算黎卡提方程。以一个简单的线性系统为例,我们来看看计算黎卡提方程的代码:
% 系统矩阵 A、B、Q、R
A = [0 1; -1 -1];
B = [0; 1];
Q = [1 0; 0 1];
R = 1;
% 求解黎卡提方程
P = care(A, B, Q, R);
% 计算反馈增益 K
K = inv(R) * B' * P; 在这段代码里,care 函数用于求解离散时间系统的代数黎卡提方程,从而得到矩阵 P。然后通过这个 P 以及已知的矩阵 R 和 B 来计算反馈增益 K。这个 K 在 LQR 控制中起到关键作用,它决定了系统的控制输入如何根据系统状态进行调整。但整个过程相对复杂,需要对系统的数学模型有比较深入的理解,不像 PID 那样凭经验调参就能有不错效果。
通用性:适合所有机器人研究
这个方法可不是只适用于某一种机器人,不管你研究的是机械臂、无人机,还是无人车,只要你想做镇定或者轨迹追踪控制算法,只要你有 sw 模型,就可以按照这个流程搭建仿真平台。比如说对于机械臂,我们可以通过调整物理模型中的关节参数以及控制算法的输入输出来适配机械臂的运动学和动力学特性;对于无人机,我们可以在模型中加入空气动力学相关的因素来模拟其真实飞行状态。
意想不到的惊喜:简单参数也有好效果
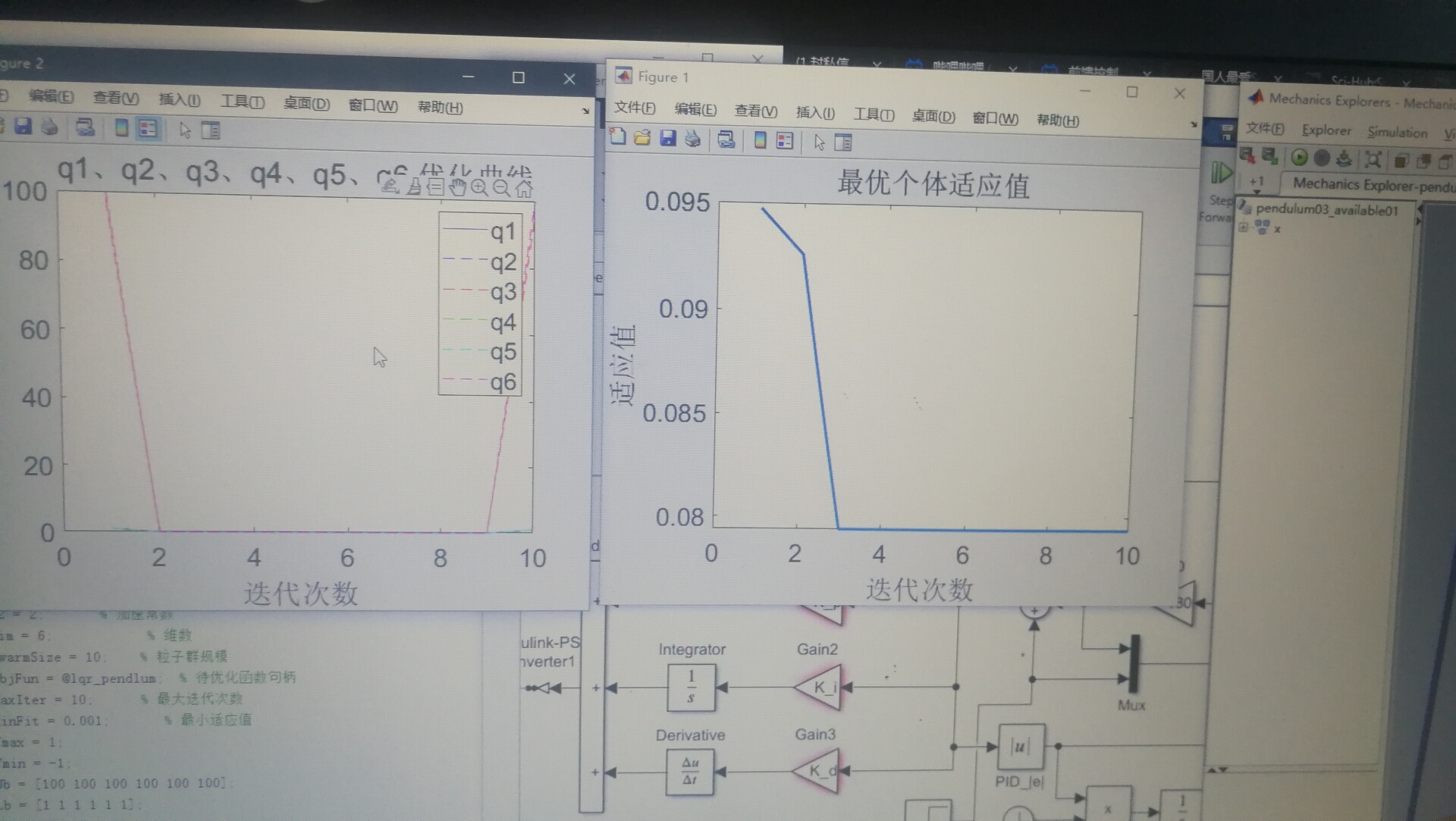
在最后测试的时候,我其实在图里随便写了几个参数,没想到结果还挺不错。这说明有时候,即使没有经过非常精细的调参,LQR 控制也能展现出它良好的性能。当然啦,这也不是鼓励大家不认真调参,只是说明 LQR 本身具有一定的自适应性和鲁棒性。
总之,机器人研究中的 LQR 控制虽然有挑战,但只要掌握了正确的方法和流程,还是能顺利实现并且取得不错成果的。希望我的这些经验能给大家带来帮助,祝大家在机器人研究的道路上越走越顺!

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐

 6
6 0
0- 0



 已为社区贡献11条内容
已为社区贡献11条内容

所有评论(0)