探索MATLAB中Stewart平台的PID控制仿真之旅
MATLAB并联机器人Stewart平台pid控制仿真simulink simscape 运动学动力学在机器人领域,并联机器人因其独特的结构和高精度的运动特性备受关注。其中,Stewart平台作为典型的并联机器人结构,在很多高端装备和精密运动控制场景中都有应用。今天咱们就来唠唠如何在MATLAB环境下,借助Simulink和Simscape对Stewart平台进行PID控制仿真,顺带也聊聊其运动学
MATLAB并联机器人Stewart平台pid控制仿真simulink simscape 运动学动力学
在机器人领域,并联机器人因其独特的结构和高精度的运动特性备受关注。其中,Stewart平台作为典型的并联机器人结构,在很多高端装备和精密运动控制场景中都有应用。今天咱们就来唠唠如何在MATLAB环境下,借助Simulink和Simscape对Stewart平台进行PID控制仿真,顺带也聊聊其运动学和动力学相关内容。
Stewart平台运动学与动力学基础
运动学
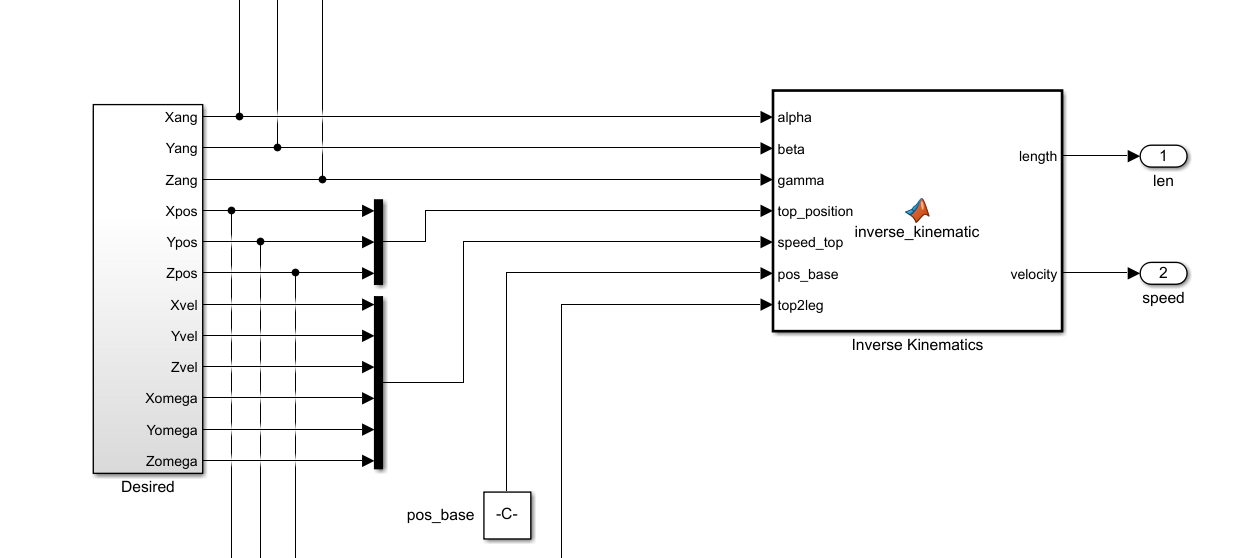
Stewart平台的运动学可分为正运动学和逆运动学。正运动学是已知平台各支腿的长度,求解平台末端执行器的位置和姿态;逆运动学则相反,是已知末端执行器的位置和姿态,求解各支腿的长度。
以逆运动学为例,假设平台上、下平台的几何参数已知,末端执行器的位置和姿态用齐次变换矩阵 $T$ 表示。对于第 $i$ 条支腿,其长度 $l_i$ 可以通过以下公式计算(这里简化表述,实际涉及到复杂的坐标变换):
% 假设已经获取到上下平台的相关几何参数和末端执行器的位姿变换矩阵T
% 计算第i条支腿长度的简单示意代码
% 上平台第i个铰点坐标为u_i,下平台第i个铰点坐标为l_i
% T为末端执行器的齐次变换矩阵
% 提取末端执行器在世界坐标系下的位置
position = T(1:3, 4);
rotation = T(1:3, 1:3);
% 上平台铰点在平台坐标系下坐标变换到世界坐标系
u_i_world = rotation * u_i + position;
l_i_world = l_i;
l_i = norm(u_i_world - l_i_world);这段代码核心就是利用末端执行器的位姿信息,结合上下平台铰点的坐标,计算出支腿的长度。在实际应用中,会涉及到更复杂的坐标系统一和变换细节。
动力学
Stewart平台的动力学分析要考虑平台所受的力和力矩,以及各部件的惯性等因素。其动力学模型通常基于拉格朗日方程来建立,拉格朗日函数 $L$ 为系统动能 $T$ 减去势能 $V$ ,即 $L = T - V$。通过对拉格朗日函数关于广义坐标和广义速度求导,并结合虚功原理,可以得到系统的动力学方程。
PID控制在Stewart平台中的应用
PID控制作为经典的反馈控制策略,在Stewart平台的运动控制中发挥着重要作用。其基本原理是根据设定值与实际输出值的误差,通过比例(P)、积分(I)、微分(D)三个环节的线性组合来计算控制量,从而调整系统的输出。
MATLAB并联机器人Stewart平台pid控制仿真simulink simscape 运动学动力学
在MATLAB的Simulink环境中搭建PID控制器非常方便。
- 打开Simulink并创建一个新的模型文件。
- 在Simulink库浏览器中找到 “Simulink” -> “Continuous” 库,拖入 “PID Controller” 模块。
- 连接输入信号(通常是期望的末端执行器位置或姿态信号)、反馈信号(实际测量的末端执行器位置或姿态信号)到PID控制器的相应端口,PID控制器的输出连接到Stewart平台模型的控制输入端口。
假设我们控制Stewart平台末端执行器在 $x$ 方向的位置,PID控制器的参数设置代码如下:
Kp = 10; % 比例系数
Ki = 0.1; % 积分系数
Kd = 1; % 微分系数
pidController = pid(Kp, Ki, Kd);这里设置了比例系数 $Kp$ 为10,积分系数 $Ki$ 为0.1,微分系数 $Kd$。比例环节能快速响应误差,积分环节用于消除稳态误差,微分环节则对误差的变化率敏感,提前对系统变化做出响应,改善系统的动态性能。
Simscape助力Stewart平台建模与仿真
Simscape是MATLAB中用于多领域物理建模和仿真的工具包,它能让我们更直观地建立Stewart平台的物理模型。
- 在Simulink库浏览器中找到 “Simscape” 库,从 “Multibody” 子库中拖入需要的刚体、关节等模块来构建Stewart平台的机械结构。
- 为各个刚体模块设置质量、惯性等物理属性。
- 通过 “Simscape” -> “Foundation Library” 中的信号转换模块,将PID控制器输出的控制信号转换为作用在Stewart平台上的力或力矩信号。
例如,为Stewart平台的某个支腿刚体设置质量属性的代码:
% 获取支腿刚体模块的句柄
legBodyHandle = find_system('StewartPlatformModel', 'Name', 'Leg1');
% 设置质量为1kg
set_param(legBodyHandle, 'Mass', '1'); 这样,一个基于Simscape的Stewart平台物理模型就初步搭建好了,结合前面设置好的PID控制器,就能进行完整的运动控制仿真了。
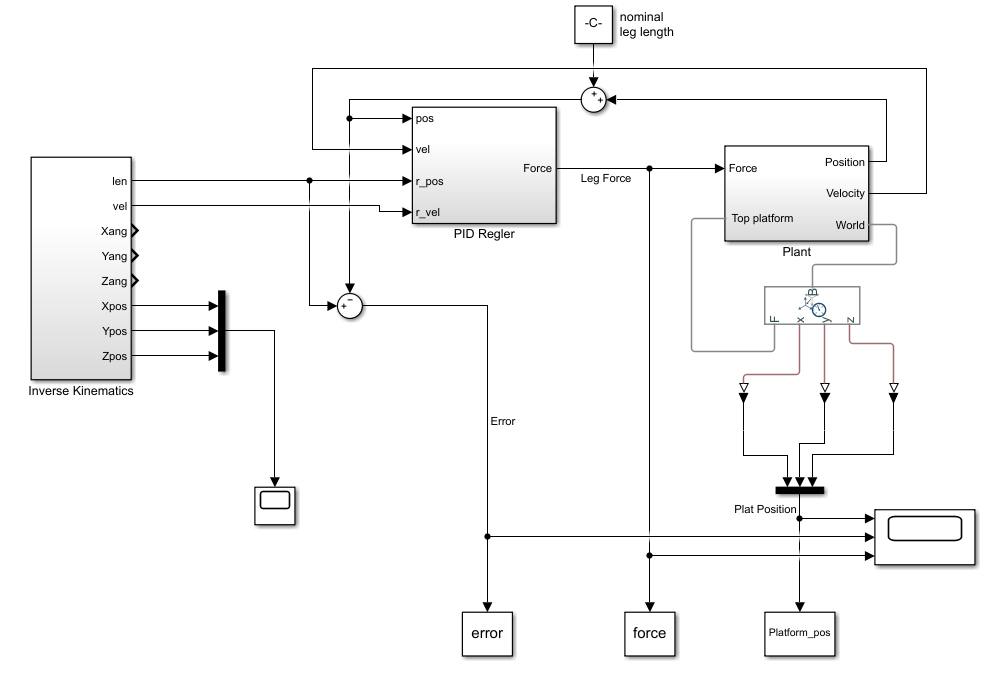
仿真结果分析
运行仿真后,我们可以从多个方面分析结果。比如观察末端执行器的位置和姿态跟踪情况,查看是否能快速准确地跟踪设定值;分析各支腿的驱动力变化,了解系统在不同运动阶段的受力情况。
通过这些分析,我们可以进一步优化PID控制器的参数,或者对Stewart平台的结构参数进行调整,以提升系统的性能。
总之,利用MATLAB的Simulink和Simscape工具,结合运动学、动力学知识以及PID控制策略,我们能够有效地对Stewart平台进行建模、控制与仿真分析,为并联机器人的实际应用开发提供有力支持。

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐



 17
17 0
0- 0



 已为社区贡献6条内容
已为社区贡献6条内容

所有评论(0)