搜救机器人设计
摘要:本文针对井下复杂环境设计搜救机器人系统,重点分析三种移动机构方案(轮式、腿式、履带式)的优缺点,最终选择履带式结构。研究内容包括:1)井下特殊环境要求(地形、气候、光照、能源);2)机器人越障机理与运动参数计算;3)驱动系统设计(电机选型、减速器方案论证);4)采用二级行星齿轮减速器进行传动设计。设计强调防爆、防水、耐高温等特性,以满足井下搜救作业需求,提升机器人在复杂地形中的通过性和稳定性
2 搜救机器人的总体结构方案设计
2.1 井下复杂环境对救灾机器人的要求
井下环境和气候与地面不同,井下环境恶劣,特别是事故刚刚发生后的井下条件更为恶劣。搜救机器人需要满足井下工作环境的特殊要求,具备快速搜寻并且准确定位井下失踪人员的功能,还要有简单的急救功能。
(1)井下地形矿山井下地形复杂,环境恶劣。巷道路面多积水,有矿车铁轨、水沟、风管、线缆等障碍物;支巷道路面窄而不平,多有坡度;工作面处的路面坡度大,有碎煤、支撑、滑道等障碍。灾害发生后,脱落的顶板、岩石、煤块等形成新的障碍物。复杂的路况要求井下机器人要有较强的越障、避障能力和行驶功能恢复能力。
(2)井下气候灾害后,井下通风系统常受到破坏,使井下气候发生明显的变化,常见瓦斯和粉尘浓度增大,灾变区域的温度、湿度增加,风量减少。所以二次瓦斯爆炸的危险也常常是影响救护队员及时下井救护的一个主要因素。为了在高瓦斯下安全工作,搜救机器人需要进行矿用隔爆兼本安型设计;元件在井下温度变化范围内应能可靠地工作;为了防止煤尘和积水进入车体内部和运动副,厢体要进行密封、防水设计。
(3)光照与烟雾井下无自然光,机器人只有自带光源。事故后,往往烟雾充斥巷道和工作面,能见度低,对照明产生一定影响。
(4)能源使用井下专用蓄电池供电。
因此,井下的特殊环境要求所设计的搜救机器人形体较小,载荷较大,运动灵活,具有通过狭小空间、碎煤和岩石区的能力,能够实现较大弧度的转动,较强的越障、爬坡能力,以及防爆、防水、耐高温、视觉防尘等功能。
2.2 典型移动机构方案论证分析
便携式机器人按移动方式分主要有轮式、履带式、腿足式三种,另外还有步进移动式、蠕动式、混合移动式、蛇行移动式等。
2.2.1 轮式移动机构特点
轮式移动机构在救灾机器人中是最为普通的运动方式,轮式机器人移动机构普遍具有结构简单、运动速度快、能源利用率高的、机动性好强的特点,同时具有自重轻、不损坏路面、作业循环时间短和工作效率高等优势。控制的角度看,编程简单并有较高的可靠性,每个轮子都可以独立驱动。与履带式移动机器人相比,当跨越不平坦地形时,轮式机器人有着固有的不足,限制了其运动能力,其稳定性和对环境的适应性完全依赖于环境本身的状况,对于进入复杂的环境完成既定任务存在严重的困难。轮式移动机构按轮的数量可分为2轮、3轮、4轮、6轮、8轮。该结构存在着一定的局限性,只能在相对平坦、表面较硬的路面上行驶,如遇到软性地面(如沼泽、草地、雪地、沙地等)容易打滑、沉陷,但可根据具体地面环境采用一些预防措施来缓解该类情况的出现,如采用不同种类的款式轮胎以提高其越野能力,象沙漠车辆、山地车辆等,其各种结构如图2-1所示。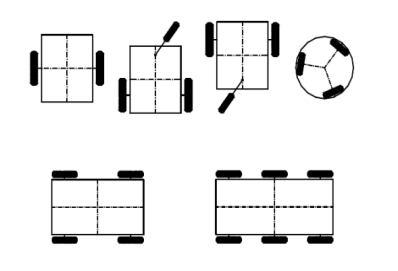
图2-1 轮式移动装置示意图
2.2.2 腿式移动机构特点
腿足式移动机构分2腿、4腿、6腿、8腿等形式。腿式移动机构优点有:
(1)腿式机器人的地形适应能力强。腿式机器人运动轨迹由一系列离散点组成,崎岖地形可以给这些离散点提供支撑,使机器人平稳运动;而轮式和履带式机器人的运动是连续规迹,有些起伏较大的地形则不支持这种连续运动轨迹,进而限制了该类机器人活动范围。
(2)腿式机器人的腿部具有多个自由度,运动更具有灵活性,通过调节腿的长度可以控制机器人重心位置,因此不易翻倒,稳定性更高;
(3)腿式机器人的身体与地面分离,这种机械结构优点在于机器人身体可以平稳地运动而不必考虑地面的租糙程度和腿的放位置,8腿移动机器人如图2-2所示,特点是稳定性好,越野能力强。
腿式移动机构缺点有:
(1)该类机器人的移动速度慢,机动性较差.因此机器人的负载不能太重;
(2)腿式机器入对地面适应性和运动灵活性需要进一步提高;
(3)腿式机器人控制系统较为复杂,控制方法还有待完善;
(4)该机构未进入实用化阶段。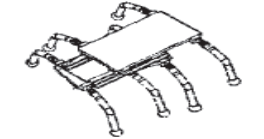
图2-2八腿机器人
2.2.3 履带式移动机构特点
履带式移动机构分为l条履带、2条履带(履带可车体左右布置或者车体前后布置)、3条履带、4条履带,6条履带,履带式移动机构与地面较大的接触面积,因此在较大的区域内分布机器人的重量,较大的接触区域使机器人具有较好的驱动牵引力,机动性能好、越野性能强,缺点是结构复杂、重量大、摩擦阻力大,机械效率低,在自身重量比较大的情况下会对路面产生一定的破坏。履带式移动机构比较轮式移动机构有以下几个特点:
(1)撑面积大、接地比压小、滚动阻尼小、通过性比较好;
(2)越野机动往能好,爬坡越沟等性能均优于轮式结构;
(3)履带支撑面上有履齿不打滑,牵引附着性能好;
(4)结构较复杂重量大,运动惯性大,减震功能差,零件易损坏。
图2-3为一部分履带式移动机构的简图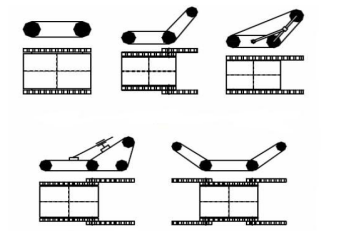
图2-3 履带式移动装置示意图
3矿用搜救机器人运动参数设计计算
3.1机器人越障分析
3.1.1机器人跨越台阶
(1)越障机理分析
当机器人在爬越台阶时,机器人履带底线与地面之间的夹角将随时间而逐渐增加,其重心越过台阶的支撑点时,机器人就跨过了台阶完成爬越动作。
(2)越障过程分析
煤矿井下搜救机器人爬越台阶的过程如图3-1所示,机器人借助摆臂的初始摆角,在履带机构的驱使下,使其主履带前端搭靠在台阶的支撑点上,机器人继续移动,驱动摆臂逆时针摆动,当机器人重心越过台阶边缘时,旋转摆臂关节,机器人在自身重力影响下,车体下移,机器人成功地爬越台阶。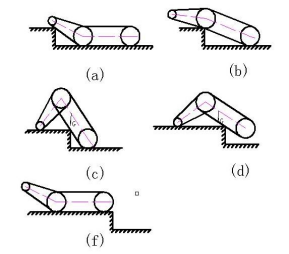
由运动过程可以看出,机器人在越障第三阶段图3-1(C)重心的位置处于临界状态,机器人重心只有越过台阶边缘,机器人才能成功的越过障碍。由此可分析出机器人的最大越障高度。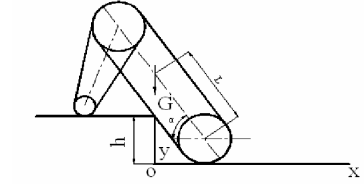
图3-2机器人上台阶临界状态示意图
由图3-2所示几何关系可得: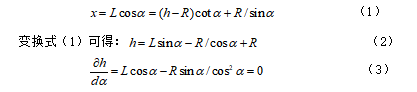
利用式(3)求出,代入式(2)可算出机器人跨越障碍的最大高度。
4机器人移动平台机械设计
4.1驱动电机的选则
4.1.1基于平地的最大速度的电机功率计算
假设机器人以最大速度匀速前进,轮子作瞬时纯滚动,前进时不考虑空气阻力的影响。如下图所示: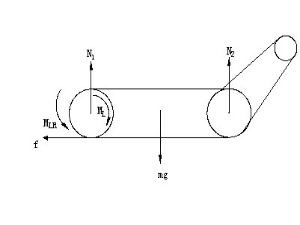
平地直线运动受力图
根据理论力学平面交汇力系平衡条件和合力矩定理: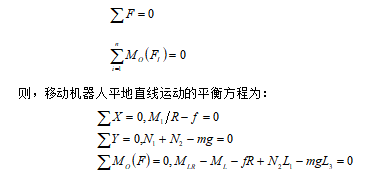
5 驱动轮减速器设计
移动减速传动机构是完成机器人前进、后退、转向等各种运动的关键部件,利用齿轮的速度转换,将动力机的转速减低到所需的转速,同时扭矩达增大到所需的扭矩。本机构采用二级减速器,电动机通过减速器的实现减速、增大转矩。电动机安装在减速器前端,通过锥齿轮改变轴的方向,输出履带驱动轮转矩,为复杂状况下救灾机器人提供主要动力。
5.1减速器方案分析
5.1.1减速器应满足的要求
(1)目前大部分的煤矿都处于深井开采,深度大都为数百米,甚至上千米,远远深于恒温带的深度,随着深度的增加,地温逐渐升高,造成地下温度很高。减速器必须满足在高温下工作要求;
(2)我国开采的矿井,大部分都为高瓦斯矿井,井内充满了浓厚的瓦斯。减速器应有隔爆防爆的作用;
(3)搜救机器人的行驶路况复杂,在行驶过程的启动、停止、前进与后退换向频繁。其载重较大,要有较大的启动转矩,启动平稳,换向灵敏;
(4)搜救机器人遥控操作,电动机用蓄电池提供能源。体积要小,重量要轻。
5.1.2 减速器方案分析
减速器的种类很多,按照传动类型可分为齿轮减速器、蜗杆减速器和行星减速器以及它们互相组合起来的减速器;按照传动级数可分为单级和多级减速器;按照齿轮形状可分为圆柱齿轮减速器、圆锥齿轮减速器和圆锥—圆柱齿轮减速器;按照传动的布置形式由可以分为展开式、分流式和同轴式减速器。
(1)展开式齿轮减速器结构简单,但齿轮相对于轴承的位置不对称,因此要求轴有较大的刚度。高速级齿轮布置在远离转矩输入端,这样,轴在转矩的作用下产生的扭矩变形和在载荷作用下轴产生的弯曲变形可部分的互相抵消,以减缓沿齿宽载荷分布不均匀的现象。用于载荷比较平衡的场合。
(2)同轴式齿轮减速器横向尺寸较小,两对齿轮侵入油中深度大致相同。但轴向尺寸和重量较大,且中间轴较长、刚度差,沿齿宽载荷分布不均匀,高速轴的承载能力难以充分利用,适合小型、微型机械适用。
(3)蜗轮蜗杆减速机的主要特点是具有反向自锁功能,可以有较大的减速比,输入轴和输出轴不在同一轴线上,也不在同一平面上。但是一般体积较大,传动效率不高,精度不高。
(4)行星减速器其优点是结构比较紧凑,回程间隙小、精度较高,使用寿命很长,额定输出扭矩可以做的很大,但价格略贵。另外行星减速箱,有平齿和斜齿2种,精度和价格都有不同。
(5)谐波减速器的谐波传动是利用柔性元件可控的弹性变形来传递运动和动力的,体积不大、精度很高,但缺点是柔轮寿命有限、不耐冲击,刚性与金属件相比较差,输入转速不能太高,价格较高。
根据复杂路况下搜救机器人的行驶速度及各项工作要求,综合各种减速器的特点,本设计采用二级减速传动,依传递运动和转矩,又根据减速箱空间的限制采用二级行星齿轮减速器。
5.2 减速器的设计计算
5.2.1减速器的传动方案分析
根据上述设计要求可知,该行星轮减速器传递功率高,传动比较大,工作环境恶劣等特点。故采用双级行星齿轮传动。2K-H型结构简单,制造方便,适用于任何情况下的大小功率的传动。选用由两个2X-A型行星齿轮传动串联而成的双级行星齿轮减速器较为合理,名义传动比可分为进行传动。
5.2.2配齿计算
根据2K-H型行星齿轮传动比的值和按其配齿计算公式,可按第一级传动的内齿,行星齿轮的齿数。先考虑到该行星齿轮传动的外廓尺寸,故选取第一级中心齿轮数为23和行星齿轮数为。根据内齿轮,则。
对内齿轮齿数进行圆整后,此时实际的P值与给定的P值稍有变化,但是必须控制在其传动比误差范围内。实际传动比为:

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐

 13
13 0
0- 0



 已为社区贡献9条内容
已为社区贡献9条内容

所有评论(0)