机械手机器人设计
本文设计了一种多功能机械手系统,采用球坐标式方案,具有五个自由度(立柱旋转、手臂伸缩/俯仰、腕部转动/摆动)。针对箱式工件的抓取需求,选用平行连杆杠杆式手部结构,通过液压驱动实现夹紧功能。重点分析了夹紧力计算方法和定位误差,引入"当量夹紧力"概念。送放机构设计部分详细阐述了主/辅运动的分类、送放范围类型(点位/面位/体位)及其对应的运动自由度组合,最终采用液压系统驱动实现体位送
一、方案设计及主要参数的确定
(一)方案设计
根据课题要求,机械手需要具备上料、翻转和转位等多种功能,并按该自动线的统一生产节拍和生产纲领完成以上动作,因此可采用以下多种设计方案。
(1)直角坐标系式,自动线成直线布置,机械手空中行走,顺序完成上料、翻转、转位等功能。这种方案结构简单,自由度少,易于配线,但需要架空行走,油液站不能固定,这使设计复杂程度增加,运动质量增大。
(2)机身采用立柱式,机械手侧面行走,顺序完成上料、翻转、转位等功能,自动线仍呈直线布置。这种方案可以集中设计液压站,易于实现电气、油路定点连接,但占地面积大,手臂悬伸量较大。
(3)机身采用机座式,自动线围绕机座布置,顺序完成上料、翻转、转位等功能。这种案具有电液集中、占地面积小、可从地面抓取工件等优点,但配线要求较高。
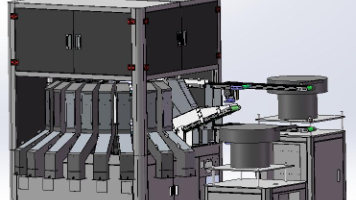
本设计拟采用第三种方案,如图(1)所示。这是一种球坐标式机械手,具有立柱旋转⌒z、手臂伸缩→x、手臂俯仰⌒y、腕部转动⌒x和腕部摆动⌒y五个自由度。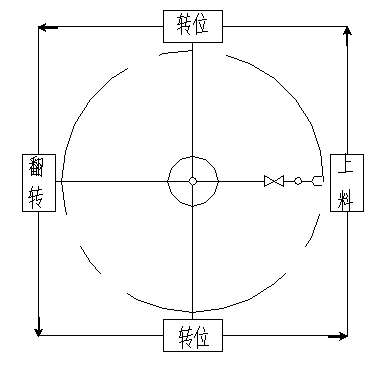
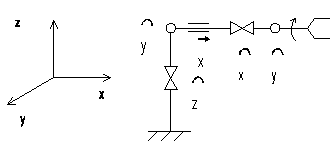
图(1)
二 、 抓取机构的设计
(一)抓取机构结构形式的确定
抓取机构的结构形式主要决定于工件的形状和质量,本课题的抓取工件为250×170×140mm的箱式零件,因此采用平行连杆杠杆式手部结构较为合适。夹紧装置为常开式,当夹紧液压缸通油时,推动活塞带动杠杆机构合拢将工件夹紧。当夹紧液压缸断油时,活塞杆通过弹簧复位,手爪张开。
(二)夹紧力(握力)的确定
当用不同的手部机构夹紧同一种工件时,由于各手部机构的增力倍数不同,所需拉紧油缸的驱动力也不同。当手部机构选定后,由于工件的方位不同(如工件水平放置或垂直放置),钳爪的受力状态不一样,因而所需拉紧油缸的驱动力也不一样。下图(2)为两钳爪式手部机构,由于驱动力P使一对平行钳口对被夹持的工件产生两个作用力N,当忽略工件重量时(即相当于夹紧一块握力表),这两个力大小相等,力N称为由驱动力P产生的夹紧力。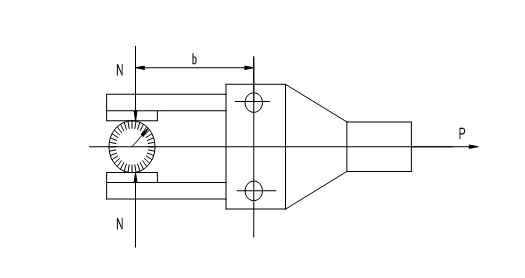
图(2)
现引入一个称为“当量夹紧力”的概念,所谓当量夹紧力,就是指把重量为G的工件,按某一方位夹紧可以求得其拉紧油缸具有的最小驱动力,这个最小驱动力所能产生的夹紧力,就称为工件在这个方位的当量夹紧力。
当量夹紧力的数值与具体的手部机构方案无关。只与工件的重量G和它相对与钳爪的放置方位有关。证明如下:
(1)首先求驱动力P与夹紧力N的关系。当驱动力推动活塞杆移动一小段距离dy时,两个钳爪都相应产生一微小转角dθ,依据虚功原理,驱动力P所做功(Pdy)和夹紧力N所做功应相等,即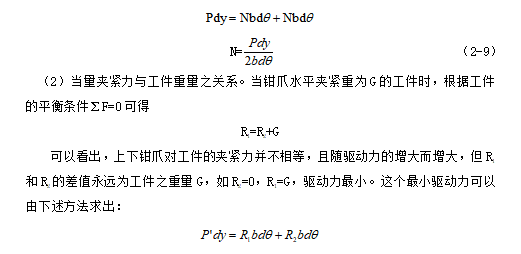
(三)夹紧缸驱动力的计算
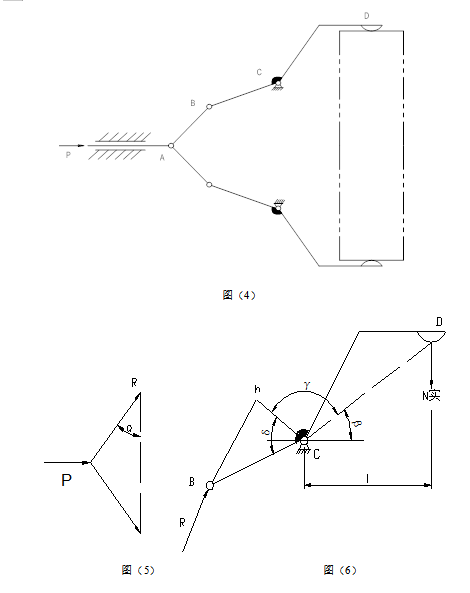
抓取机构产生的握力是通过驱动装置产生的驱动力经传动机构传递而得到的。如图(4)所示为夹紧缸受力分析简图,图中P为驱动力,N实为握力。由图(5)和图(6)的受力分析可得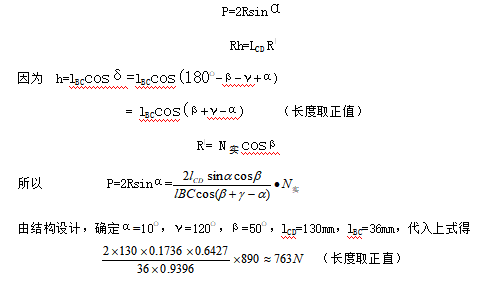
(四)夹钳式抓取机构的定位误差分析
图(7)所示的为一支点回转型手指的示意图。图示情况为分别夹持两种不同直径的工件时的情况。其中,为手指长度,即手指的回转中心A到V形槽顶点B之间的距离;为V形槽的夹角;为偏转角,即V形槽的角平分线BC与手指AB间的夹角;R为工件的半径。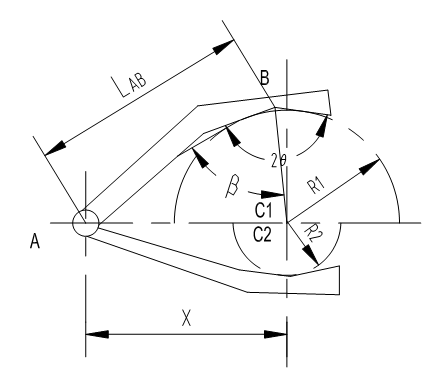
三、送放机构的设计
(一)概述
1.送放运动
改变被抓取物体的位置和方向,并将其送放到一定的目的位置上,这一运动过程称为送放运动。送放运动是机械手或机器人或机器人最主要的运动,包括手臂、手腕和行走装置的运动,但不包括机械手或机器人手爪抓取物体的动作。因此,抓取动作只具有抓取功能,不能改变被抓取物的位置和方向,因而不是送放运动。送放运动又可分为主运动和辅运动两部分,手臂的运动为主运动,手腕的运动和整机的行走运动为辅运动。主运动决定送放运动的空间范围的形状和性质,辅运动可扩大送放运动或改变被送放物体在空间的方位。
2.送放范围
机械手或机器人将被抓取的物体送放到某一位置,其所能达到的空间范围称为机械手或机器人的送放范围。当送放位置为一点时,称为点位送放;当送放位置在一个确定的表面内(如矩形面、扇形面、圆柱面)时,这样的送放范围称为面位送放;当送法的位置在一个确定的空间体内(如长方体、圆柱体、球体、多球体)时,这样的送放范围称为体位送放。点位送放、面位送放、体位送放均由主运动的运动形式、自由度及其组合来决定。
3.送放图形
送放范围可用送放图形(送放运动的轨迹或空间的形状及大小)来描述。
点位送放的送放位置为确定的点,其主运动只有一个自由度。其运动形式为直线运动时,送放图形为一直线;为回转运动时,送放图形为一圆弧;为复合运动,送放图形为一空间曲线。
面位送放,其送放图形为一确定的表面,由两个参变量决定,故主运动需要两个自由度。其送放图形为三种不同的情况:两个直线运动组合,送放图形为一矩形面;两个回转运动组合时,送放图形为一圆弧面;一个直线运动和一个回转运动组合时,送放图形为一扇形面(如手臂伸缩和手臂回转组合)或圆柱面(如手臂升降和手臂回转组合。
体位送放,其送放图形为一个确定的空间体,故主运动有三个自由度。其送放图形也有几种不同的情况:三个直线运动组合时,送放图形为一空间立方体;两个直线运动和一个回转运动组合时,送放图形为一空间圆柱体;两个回转运动和一个直线运动组合是,送放图形为一空间组合体;三个回转运动组合时,送放图形为空间球体或多球体。
4.送放运动的自由度
送放运动具有的独立运动参数的数目,即送放运动的自由度,亦即机械手或机器人的自由度。它等于主运动自由度数和辅运动自由度数之和。一般情况下,主运动有1~3个自由度:当主运动有1个自由度时,送放图形为点位送放;当主运动有2个自由度时,送放图形为面位送放;当主运动有3个自由度时,送放图形为体位送放。如果采用多关节的送放机构,则机械手的主运动自由度数还可以增加,但其结构非常复杂,故实际应用不多。此时,宜采用增设辅运动的方法来增加机械手的功能,如增加腕部的平移或整机的行走运动以扩大送放范围,或增设腕部的回转和摆动运动以改变被送放物的方位。
机械手有几个自由度就说明有几个送放运动。自由度越多,送放动作也越多,则机械手越灵活,其送放范围也越大,但机械手也越复杂。
本次所设计的机械手的送放机构共有5个自由度,即主运动有3个自由度(手臂的伸缩、回转、俯仰)、辅助运动有2个自由度(腕部的回转、摆动),为体位送放,全部采用液压驱动,分别由两个直动液压和三个回转液压缸来实现。机械手液压系统的工作原理图如下图(9)所示: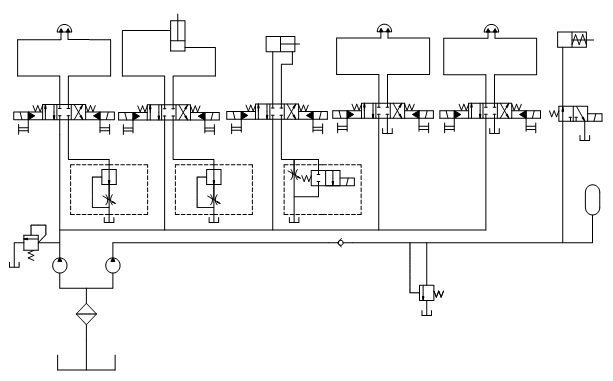
图(9) 液压系统的工作原理图

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐


 14
14 0
0- 0



 已为社区贡献9条内容
已为社区贡献9条内容

所有评论(0)