工业机器人结构设计
本文分析了工业机器人的机械结构及其传动系统设计。首先概述了机器人由机构部分、传感器组、控制部分及信息处理部分构成,重点阐述了六自由度运动原理。详细介绍了第一轴(大臂)采用三级斜齿轮传动的设计方案,包括传动比分配(2.4×4.87×5.7)和齿轮参数计算(材料40Cr,7级精度)。第二轴通过一级齿轮传动实现左右摆动,第三轴完成上下摆动。文章还涉及转角控制设计(0-270°挡块结构)以及第一臂与底座的
2 机器人的结构分析
2.1总体结构的概述
目前,世界上已有许多工业机器人,其中大部分属于“示教再现”型。如果将这类机器人称作第一代,那么,具有一定程度的视觉、触觉、或某种分析、判断能力的工业机器人就属于第二代了。不少国家正在积极研制具有观觉、触觉等功能的工业机器人,并取得了不少成果,但是,真正将这些成果应用于生产实际的还为数不多。在实际生产(如喷漆、焊接、装配等)中被广泛应用的工业机器人,示教再现型还是较多。
一般的机器人,它由机器人的机构部分、传感器组、控制部分及信息处理部分构成。机构部分有机械手和移动机构两部分组成;传感器有测量机器人自身位置姿态和速度、加速度的内传感器和了解外部环境及作业对象工作情况的外传感器;控制器是直接控制机器人运动的装置,只要不是自主型移动机器人,它通常放在与机器人不同的地方,通过导线连接。在工业机器人的控制装置中,有电动机驱动电路、PTP运动目标点和CP运动轨迹数据的记忆装置和定位控制电路等。信息处理装置通过信息传输装置与机器人本体相连,多用于智能机器人。
机器人具有六自由度,即大臂的回转、臂的左右摆动、臂的上下摆动、手腕的回转、手腕的伸缩和手爪的抓取。当然,图中没有表示出控制系统及手爪抓取的那一部分。该六自由度机器人运动的情况说明如下:首先,由电动机M1经过传动系统带动大臂的回转运动,且与大臂相连的所有其它手臂、手腕及机械构件也随大臂一起作回转运动;而后另一手臂由电动机M2驱动作左右摆动;还有,第三臂由电动机M3驱动作上下摆动;最后,手腕的回转、伸缩及手爪的抓取由其它三个电动机驱动。
2.2第一轴(大臂)的结构
大臂的结构图(图2-1)及其传动原理简图(图2-1):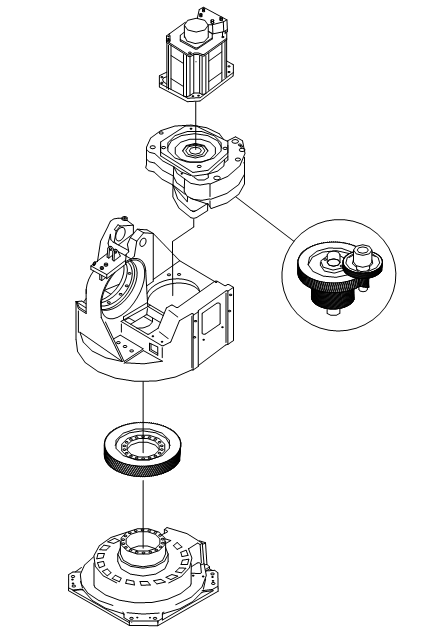
图2-1
2.3 第二轴的结构
第二轴的结构图(图2-2):
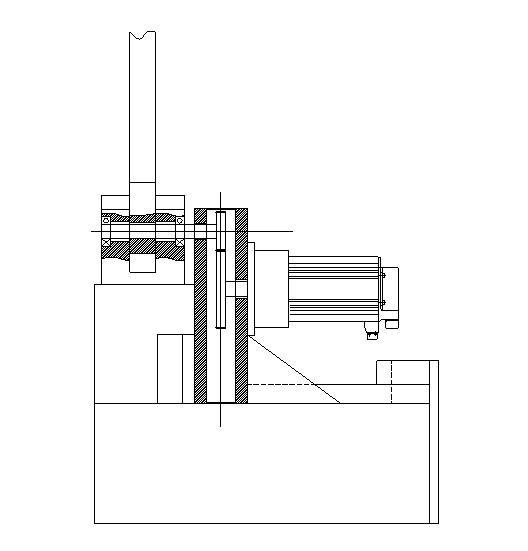
图2-2
第二轴,该手臂实现工业机器人的左右摆动,整个系统由伺服电动机驱动。为了实现传动的设计要求以及结构的最优化设计要求,整个减速系统采用了一级齿轮传动。由电动机上的一个齿轮和轴承右侧的一个齿轮啮合,轴承通过定位销与第二大臂固定,电动机带动齿轮,把动力传给与第二臂固定的轴承,使得第二臂实现水平线上的前后摆动。
2.4第三轴的结构
第三轴的结构图(图2-3):
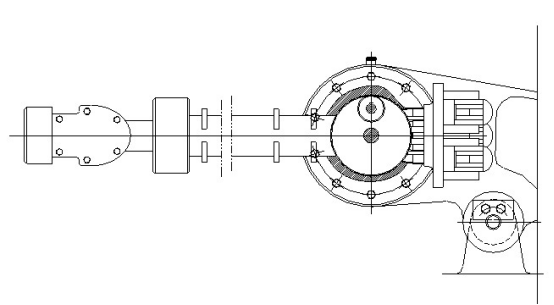
图2-3
4 传动结构的设计计算
4.1 第一轴的传动结构设计
第一轴的传动方案已确定,采用三级斜齿轮传动,且电动机的功率为P=3KW,n=1000r/min,则传动比u=1000/15=66.67。
一 、传动比的分配:已知斜齿轮的传动比u≤6,再根据传动减速时前面降得慢,而后面降得快的原则,三级降速的传动比分配如下: u=2.44.875.7
二 、各级的传动设计
第一级斜齿轮的传动设计计算:已知电动机的功率P=3KW,n=1000r/min,传动比u=2.4,则
1.选定齿轮类型、精度等级、材料及齿数
1)按照传动方案的设计要求,选用斜齿圆柱齿轮传动。
2)考虑减速设计的要求,故大、小齿轮都选用硬齿面。由查表(常用齿轮材料及其机械特性表)选得大、小齿轮的材料均为40Cr,并经调质及表面淬火,齿面硬度为48~55HRC。
3)选用精度等级。 因采用表面淬火,轮齿的变形不大,不需磨削,故初选7级精度(GB10095-88)。
4)选小齿轮齿数Z1=35,大齿轮齿数Z2=uZ1=2.435=84。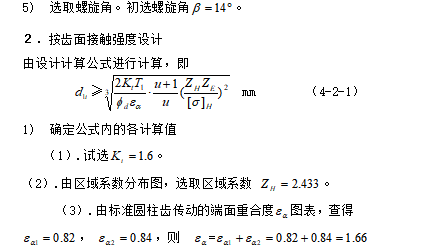
5 机器人各零部件的结构设计
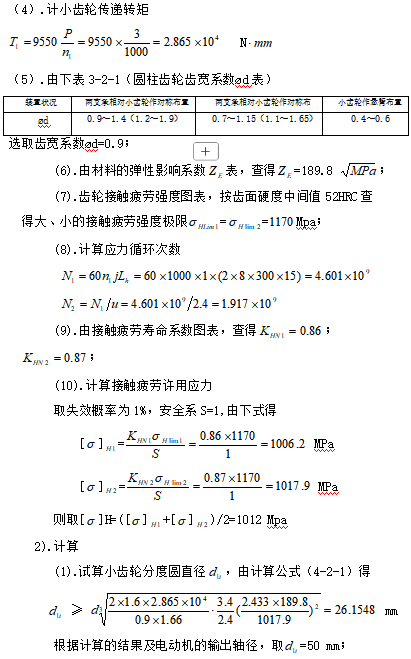
5.1 转角范围的控制设计
控制系统是工业机器人的重要组成部分,在某种意义上讲,控制系统起着与人脑相似的作用,工业机器人的手部、腕部、臂部、行走机构等的动作以及与相关机械的协调动作都是通过控制系统来实现的。主要控制内容有动作的顺序、动作的位置与路径、动作的时间。
按设计要求要实现的转角范围,可以直接由控制系统来完成,控制动作的位置或动作的时间,从而控制转角。这里用挡块结构设计来实现控制转角范围。第一轴的控制转角(0~270)的挡块结构示意图如图5-1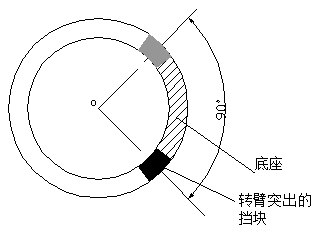
图5-1
5.2主要零部件的结构设计(第一臂与底座)
5.2.1 第一轴转臂的结构:如图5-2,具体尺寸见附图(零件图)。
5.2.2底座的结构设计:如图5-3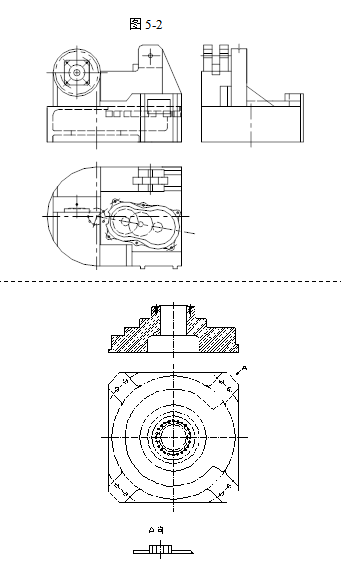
图5-3

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐
 10
10 0
0- 0



 已为社区贡献16条内容
已为社区贡献16条内容

所有评论(0)