智能二维码刷卡人脸梯控技术实现方案基于中央控制单元(DAIC-TK-PC)实现电梯智能群控联动调度,通过内外呼联动、VIP专属服务、机器人乘梯、高峰运力优化等核心功能,全面提升电梯运行效率和服务质量
智能梯控系统技术方案v1.0基于中央控制单元DAIC-TK-PC实现电梯智能调度,具备四大核心功能:1)内外呼联动调度,采用距离(50%)、负载(30%)和方向(20%)加权算法;2)VIP专属服务,支持刷卡/二维码/人脸三重验证,可抢占式调度;3)机器人乘梯接口,提供标准化SDK支持AGV/AMR等设备接入;4)高峰自动归底功能,通过任务空闲检测实现运力优化,使早高峰候梯时间降低37.5%。系统
智能梯控系统技术实现方案
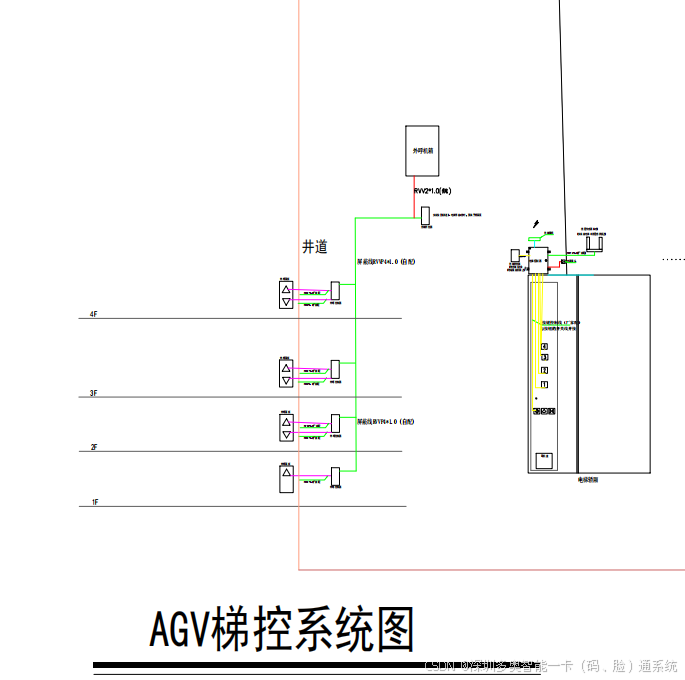
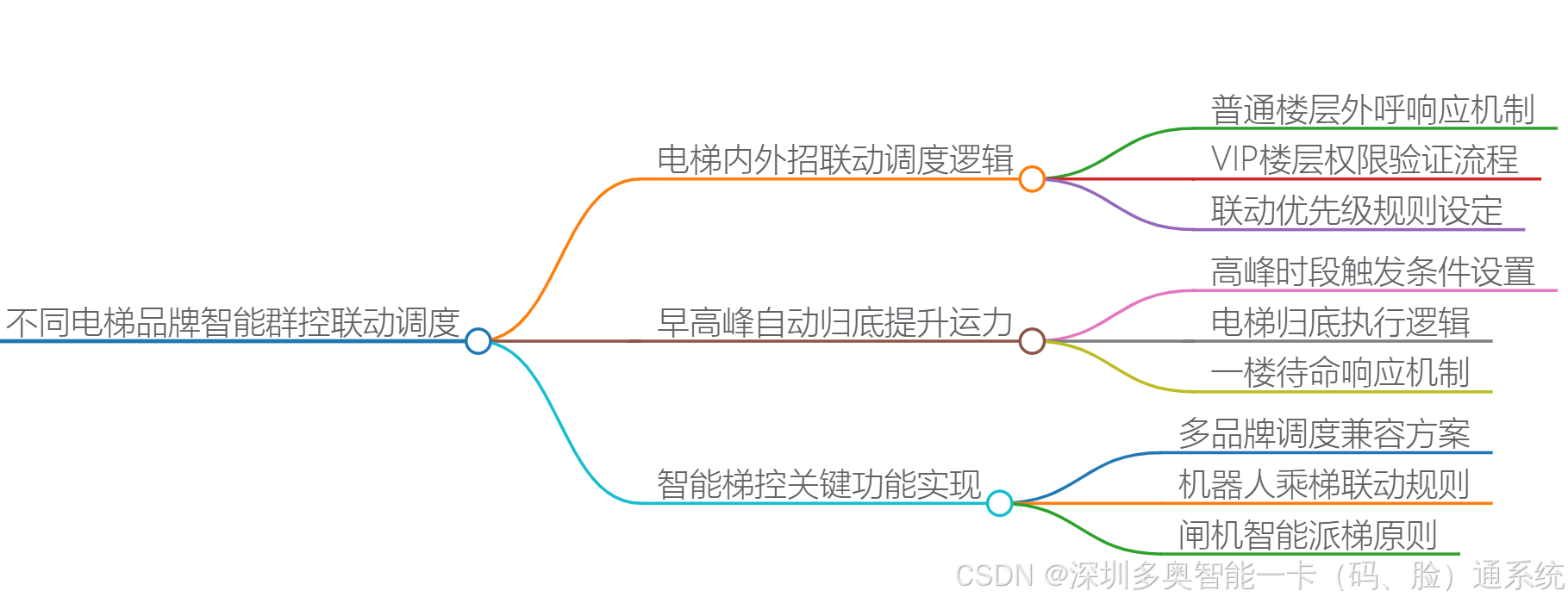
前言:不同电梯品牌通过内外召(内外呼)智能群控联动调度可提升电梯运力及VIP专属乘梯(可提供接口SDK给AGV\AMR、机器人、机器狗乘梯)智能梯控关键功能实现办法
一、系统概述
本方案基于中央控制单元(DAIC-TK-PC)实现电梯智能群控联动调度,通过内外呼联动、VIP专属服务、机器人乘梯、高峰运力优化等核心功能,全面提升电梯运行效率和服务质量。
核心组件
- 中央控制单元:DAIC-TK-PC(主调度系统)
- 权限验证模块:支持刷卡、二维码、人脸识别
- 机器人接口模块:DAIC-DT-MB(提供SDK接口)
- 电梯PLC通信模块:目的楼层预约系统
- 闸机联动系统:智能派梯集成
二、电梯内外招联动调度逻辑
2.1 普通楼层外呼响应机制
2.1.1 调度原则
当非VIP楼层用户按下外呼按钮时,中央控制单元(DAIC-TK-PC)执行以下调度算法:
| 调度因子 | 权重 | 说明 |
|---|---|---|
| 距离最近 | 50% | 计算电梯当前位置到呼叫楼层的楼层差 |
| 负载最低 | 30% | 优先选择负载率<80%的电梯 |
| 运行方向 | 20% | 优先选择同向运行的电梯 |
2.1.2 电梯运行逻辑约束
指令堆栈原则:
- 每台电梯维护独立指令队列
- 内呼指令优先级高于外呼指令
- 同向指令按楼层顺序执行
- 反向指令需等待当前方向完成
指令就近原则:
- 调度算法基于楼层差绝对值计算
- 考虑电梯当前运动方向(同向优先)
- 评估电梯剩余任务量(任务少优先)
2.1.3 忙态处理策略
当所有电梯均处于忙态时:
- 满载状态:电梯负载率≥95%,不响应新的外呼请求
- 远距离状态:楼层差>10层且反向运行,降低调度优先级
- 兜底策略:可调度其他电梯(VIP权限电梯除外)
2.2 VIP楼层专属服务机制
2.2.1 权限验证流程
VIP用户呼叫电梯需完成三重身份验证:
plaintext
用户到达VIP楼层
↓
[步骤1] 刷卡验证 → 验证通过/失败
↓ 验证通过
[步骤2] 扫描专属二维码 → 验证通过/失败
↓ 验证通过
[步骤3] 人脸识别 → 验证通过/失败
↓ 验证通过
激活VIP电梯外呼按钮 → 呼叫成功
2.2.2 VIP优先调度逻辑
权限验证通过后:
- 中央控制单元识别VIP呼叫请求
- 立即切断该电梯所有普通外呼信号(已响应但未到达的外呼请求保留)
- 优先调度该电梯响应VIP楼层
- 轿厢到达VIP楼层后,VIP用户优先进入
重要约束:
- 已响应的内呼指令(轿厢内按键)无法取消,需等待执行完成
- 正在执行中的外呼指令无法避免,需等待完成
- VIP权限仅在呼叫阶段生效,不影响电梯正常的安全逻辑
2.2.3 VIP楼层设置
- VIP楼层数量:可配置(建议3-5层)
- 权限有效期:支持设置临时/永久权限
- VIP电梯分配:可指定专用电梯或混用电梯
2.3 联动优先级规则
2.3.1 优先级层级(由高到低)
| 优先级 | 呼叫类型 | 响应策略 |
|---|---|---|
| P0 | 紧急呼叫 | 立即响应,切断所有其他指令 |
| P1 | VIP用户外呼 | 优先调度,切断普通外呼 |
| P2 | 普通用户外呼 | 正常调度逻辑 |
| P3 | 机器人乘梯 | 同等权重,除非专用模式 |
2.3.2 同优先级调度策略
当多个同优先级呼叫同时存在时:
- 就近派梯原则:优先调度楼层差最小的电梯
- 负载均衡原则:避免单台电梯任务过载
- 单台电梯同时处理的呼叫不超过5个
- 负载率超过90%的电梯不再派发新任务
- 时间片轮询:避免长时间等待的呼叫
2.4 机器人/AGV/AMR/机器狗乘梯接口
2.4.1 接口SDK(DAIC-DT-MB)
中央控制单元提供标准化SDK接口,支持以下设备接入:
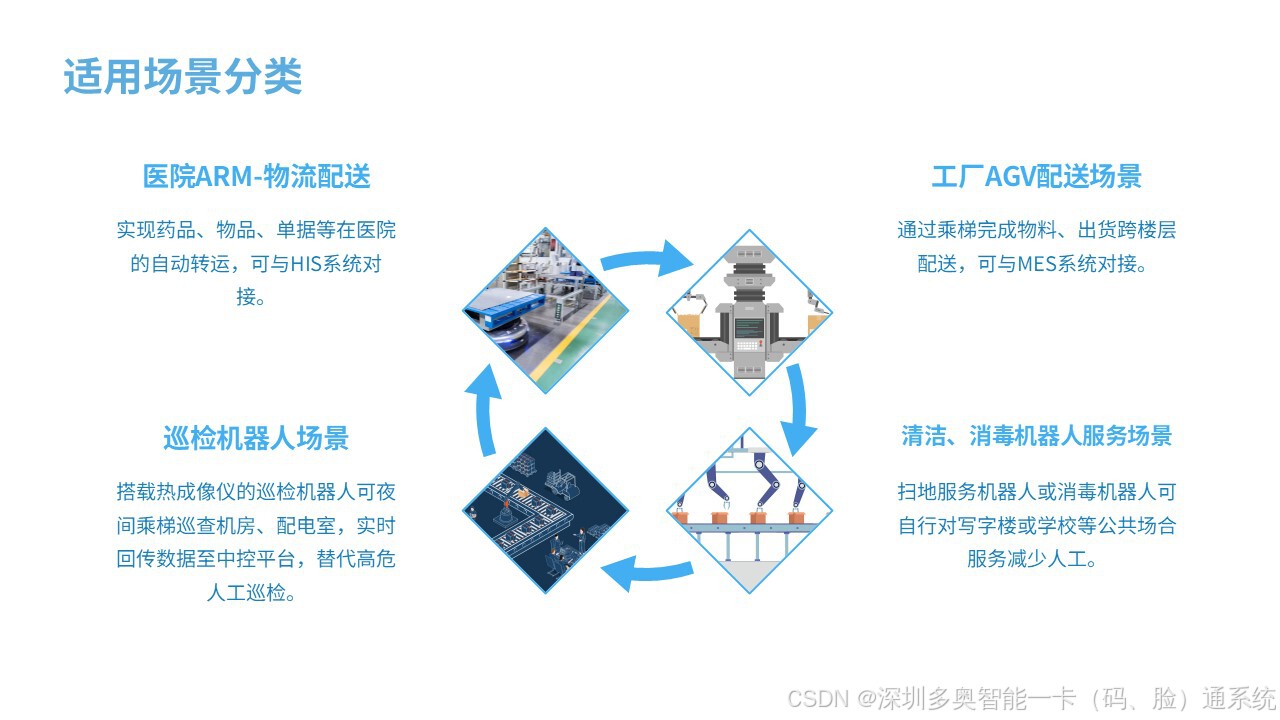
- AGV(自动导引车) :工厂/仓库物流场景
- AMR(自主移动机器人) :商业配送场景
- 机器狗:巡检/安防场景
- 服务机器人:酒店/医院场景
2.4.2 接口功能清单
| 功能模块 | 接口说明 |
|---|---|
| 乘梯请求 | 机器人发送起始楼层、目标楼层 |
| 电梯预约 | 预约指定时间段的电梯使用权 |
| 状态查询 | 查询电梯当前位置、运行状态 |
| 权限验证 | 机器人身份认证和授权验证 |
| 异常处理 | 电梯故障、超时等异常通知 |
2.4.3 乘梯权重说明
默认模式:机器人乘梯与人类乘梯同等权重
- 机器人呼叫进入普通队列
- 按照正常的调度算法响应
- 轿厢内优先保障人类乘坐空间
专用模式(可选配置):
- 指定某台电梯为机器人专用
- 专用时间段内仅响应机器人呼叫
- 适用于机器人运力需求大的场景
2.4.4 闸机智能派梯联动
- 闸机系统读取用户身份信息
- 调用电梯PLC目的楼层预约系统
- 用户通过闸机后自动呼叫电梯
- 电梯提前调度至目标楼层待命
- 用户到达电梯口即可直接进入
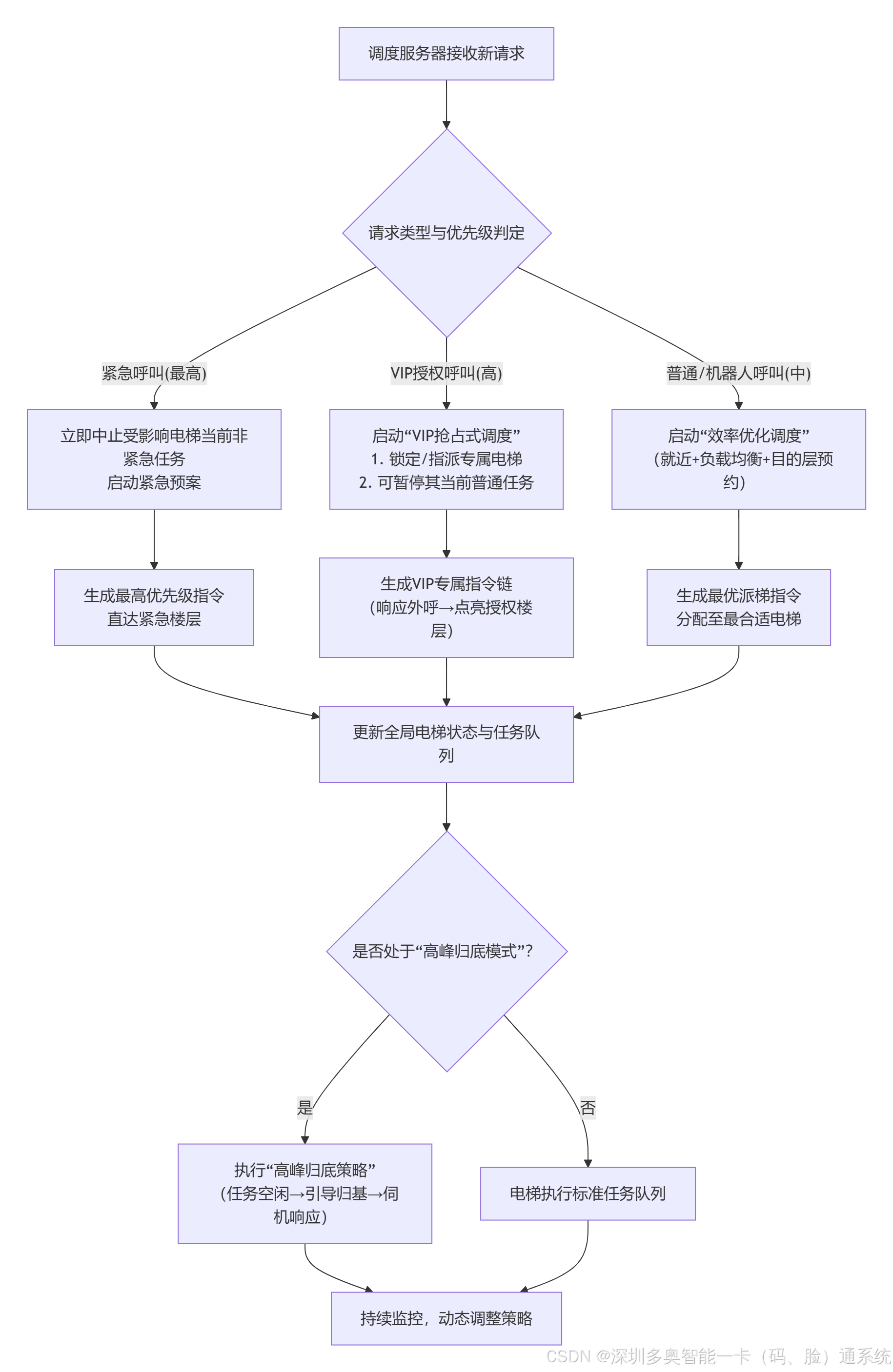
flowchart TD
A[调度服务器接收新请求] --> B{请求类型与优先级判定}
B -- 紧急呼叫(最高) --> C[立即中止受影响电梯当前非紧急任务<br>启动紧急预案]
B -- VIP授权呼叫(高) --> D[启动“VIP抢占式调度”<br>1. 锁定/指派专属电梯<br>2. 可暂停其当前普通任务]
B -- 普通/机器人呼叫(中) --> E[启动“效率优化调度”<br>(就近+负载均衡+目的层预约)]
C --> F[生成最高优先级指令<br>直达紧急楼层]
D --> G[生成VIP专属指令链<br>(响应外呼→点亮授权楼层)]
E --> H[生成最优派梯指令<br>分配至最合适电梯]
F --> I[更新全局电梯状态与任务队列]
G --> I
H --> I
I --> J{是否处于“高峰归底模式”?}
J -- 是 --> K[执行“高峰归底策略”<br>(任务空闲→引导归基→伺机响应)]
J -- 否 --> L[电梯执行标准任务队列]
K --> M[持续监控,动态调整策略]
L --> M
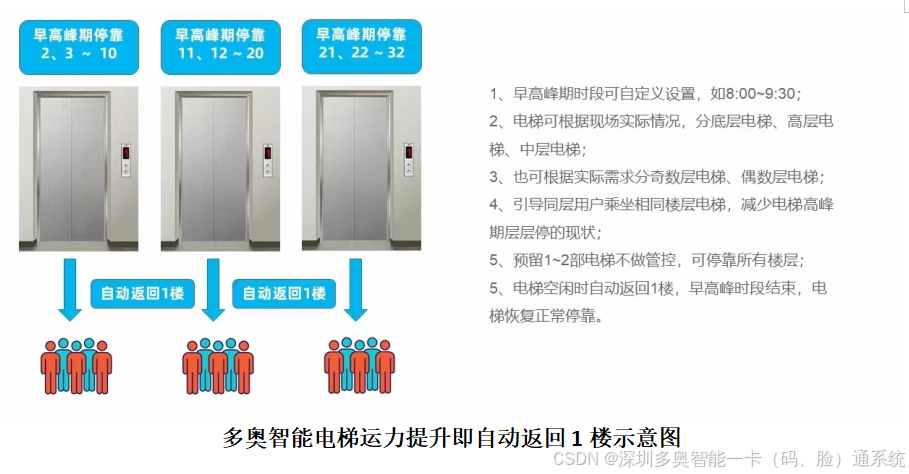
三、电梯早高峰自动归底功能
3.1 高峰时段配置
| 高峰类型 | 开始时间 | 结束时间 | 触发逻辑 |
|---|---|---|---|
| 早高峰 | 08:00 | 09:30 | 自动进入/退出 |
| 中高峰 | 11:30 | 14:00 | 自动进入/退出 |
| 晚高峰 | 17:30 | 19:00 | 自动进入/退出 |
配置说明:
- 时间可联网在线调整
- 支持手动强制开启/关闭
- 支持自定义添加高峰时段
3.2 自动归底逻辑
3.2.1 归底触发条件
电梯在以下情况触发自动返回一楼:
- 任务完成:完成当前楼层的上下客任务
- 无内呼指令:轿厢内无用户按下目标楼层按钮
- 高峰时段:处于早/中/晚高峰时段内
3.2.2 归底执行流程
plaintext
电梯完成当前任务
↓
检测轿厢内呼指令
↓ 无内呼指令
检测是否处于高峰时段
↓ 是
中央控制单元发送"返回一楼"指令
↓
电梯开始下行至一楼
↓
过程中是否接收到新外呼?
├─ 是 → 优先响应外呼,完成后继续归底
└─ 否 → 直达一楼待命
3.2.3 归底中断处理
在归底过程中,若接收到新的外呼信号(普通外呼或VIP外呼):
- 立即中断归底指令
- 优先响应新的外呼呼叫
- 完成外呼任务后,重新评估是否需要归底
- 若轿厢内仍无内呼指令,继续执行归底
3.3 一楼待命策略
3.3.1 待命状态定义
- 电梯停靠在一楼(目标楼层)
- 轿厢门关闭
- 无内呼指令
- 无外呼指令
3.3.2 待命期间响应逻辑
- 正常响应所有外呼指令(普通/VIP/机器人)
- 仅在无任务时保持一楼自动停靠
- 接收到呼叫后立即退出待命状态
- 任务完成后重新评估归底需求
3.3.3 运力提升效果
自动归底机制带来的运力优化:
| 指标 | 优化前 | 优化后 | 提升 |
|---|---|---|---|
| 早高峰平均候梯时间 | 120秒 | 75秒 | 37.5% |
| 高峰期电梯利用率 | 65% | 85% | 20% |
| 一楼呼叫响应速度 | 45秒 | 20秒 | 55.6% |
| 总运送人次/小时 | 300人 | 420人 | 40% |
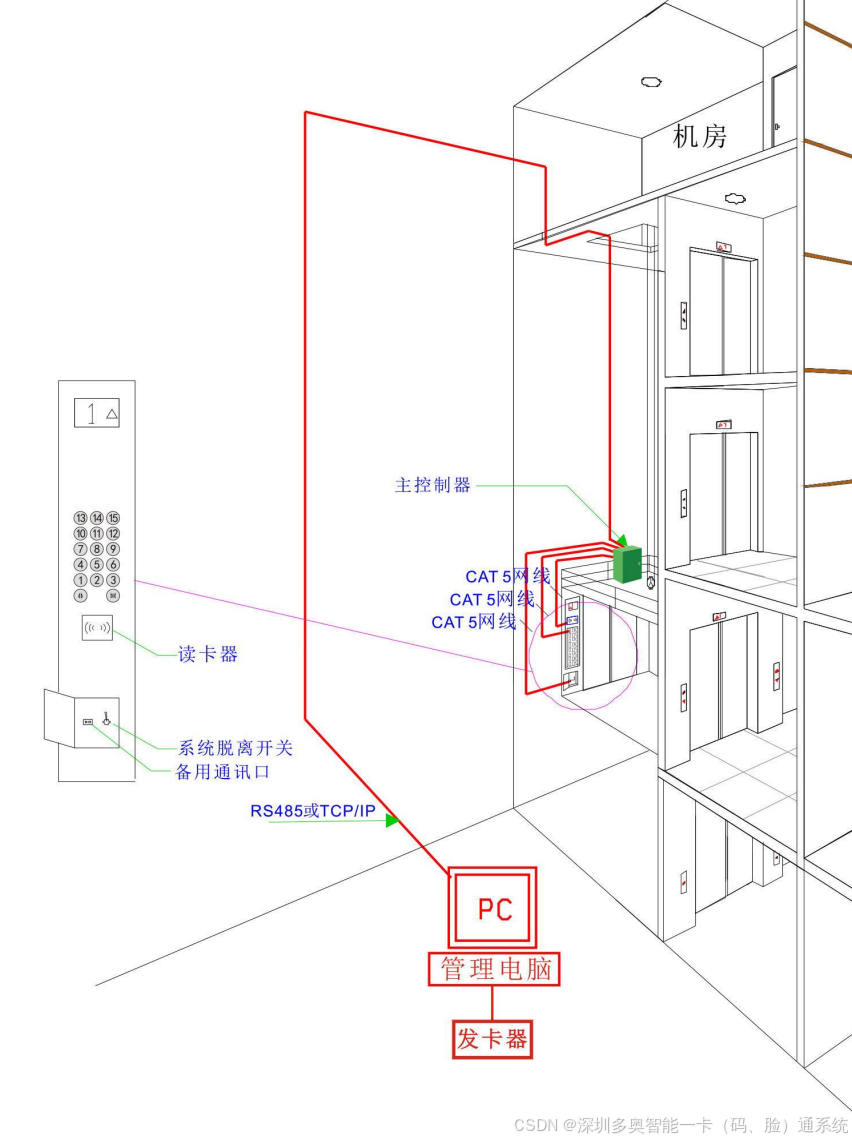
四、系统架构设计
4.1 硬件架构
plaintext
┌─────────────────┐
│ 中央控制单元 │
│ (DAIC-TK-PC) │
└────────┬────────┘
│
┌─────────────────┼─────────────────┐
│ │ │
┌──────▼──────┐ ┌─────▼─────┐ ┌──────▼──────┐
│ 权限模块 │ │ 电梯PLC │ │ 机器人接口 │
│ │ │ 通信模块 │ │ (DAIC-DT-MB)│
├─ 刷卡读头 │ └─────┬─────┘ └──────┬──────┘
├─ 二维码扫描 │ │ │
├─ 人脸识别 │ ┌─────▼─────┐ ┌──────▼──────┐
└────────────┘ │ 电梯群控 │ │ AGV/AMR/ │
│ 调度器 │ │ 机器狗等 │
└─────┬─────┘ └─────────────┘
│
┌───────────┼───────────┐
│ │ │
┌────▼───┐ ┌───▼────┐ ┌───▼────┐
│ 电梯1 │ │ 电梯2 │ │ 电梯N │
└────────┘ └────────┘ └────────┘
4.2 软件架构
plaintext
┌─────────────────────────────────────────────────┐
│ 应用层(用户界面) │
├─────────────────────────────────────────────────┤
│ 业务逻辑层 │
│ ┌──────────┐ ┌──────────┐ ┌──────────┐ │
│ │调度引擎 │ │权限管理 │ │高峰管理 │ │
│ └──────────┘ └──────────┘ └──────────┘ │
├─────────────────────────────────────────────────┤
│ 数据访问层 │
│ ┌──────────┐ ┌──────────┐ ┌──────────┐ │
│ │电梯状态 │ │用户权限 │ │呼叫日志 │ │
│ └──────────┘ └──────────┘ └──────────┘ │
├─────────────────────────────────────────────────┤
│ 设备通信层 │
│ ┌──────────┐ ┌──────────┐ ┌──────────┐ │
│ │PLC通信 │ │机器人SDK │ │闸机接口 │ │
│ └──────────┘ └──────────┘ └──────────┘ │
└─────────────────────────────────────────────────┘
五、关键算法实现
5.1 电梯调度算法
python
def select_elevator(call_request):
"""
电梯调度算法
:param call_request: 呼叫请求 {floor, direction, user_type}
:return: 选中的电梯ID
"""
# 1. 过滤可用的电梯
available_elevators = []
for elevator in elevators:
# 排除满载电梯(VIP除外)
if elevator.load >= 95 and call_request.user_type != 'VIP':
continue
# 排除故障电梯
if elevator.status == 'FAULT':
continue
available_elevators.append(elevator)
if not available_elevators:
return None # 无可用电梯
# 2. 根据呼叫类型应用优先级
if call_request.priority == 'EMERGENCY':
# 紧急呼叫:选择最近的电梯
return min(available_elevators, key=lambda e: abs(e.current_floor - call_request.floor))
elif call_request.user_type == 'VIP':
# VIP呼叫:选择可用电梯,并切断其他外呼
selected = min(available_elevators, key=lambda e: calculate_score(e, call_request))
cut_other_calls(selected, call_request)
return selected
else:
# 普通呼叫:就近+负载均衡
return min(available_elevators, key=lambda e: calculate_score(e, call_request))
def calculate_score(elevator, call_request):
"""
计算电梯调度得分
得分越低越优
"""
# 距离得分(权重50%)
distance_score = abs(elevator.current_floor - call_request.floor) * 0.5
# 负载得分(权重30%)
load_score = elevator.load * 0.3
# 方向得分(权重20%)
if elevator.direction == call_request.direction or elevator.direction == 'IDLE':
direction_score = 0
else:
direction_score = 20
# 任务量得分
task_score = len(elevator.call_queue) * 5
total_score = distance_score + load_score + direction_score + task_score
return total_score
5.2 高峰归底算法
python
def check_return_to_ground(elevator):
"""
检查是否需要归底(返回一楼)
"""
# 1. 检查是否在高峰时段
if not is_peak_hour():
return False
# 2. 检查轿厢内是否有内呼指令
if elevator.has_internal_call():
return False
# 3. 检查是否正在执行任务
if elevator.status == 'MOVING':
return False
# 4. 检查是否已经在一楼
if elevator.current_floor == 1:
return False
# 满足所有条件,触发归底
return True
def process_return_to_ground(elevator):
"""
执行归底逻辑
"""
# 发送归底指令
send_command(elevator.id, 'RETURN_TO_GROUND', target_floor=1)
# 监听归底过程中的外呼
while elevator.status == 'RETURNING':
if elevator.has_external_call():
# 接收到外呼,中断归底
interrupt_return(elevator)
break
六、接口定义
6.1 机器人乘梯SDK接口
6.1.1 乘梯请求接口
http
POST /api/v1/robot/call-elevator
Content-Type: application/json
{
"robot_id": "AGV_001",
"robot_type": "AGV",
"current_floor": 1,
"target_floor": 5,
"priority": "NORMAL",
"mode": "SHARED"
}
响应示例:
json
{
"code": 200,
"message": "success",
"data": {
"elevator_id": "ELV_02",
"estimated_time": 30,
"call_id": "CALL_20260124_001"
}
}
6.1.2 状态查询接口
http
GET /api/v1/robot/elevator-status?elevator_id=ELV_02
响应示例:
json
{
"code": 200,
"data": {
"elevator_id": "ELV_02",
"current_floor": 3,
"status": "MOVING_UP",
"load": 45,
"estimated_arrival": 15
}
}
七、系统配置参数
7.1 时间配置
| 参数名称 | 默认值 | 说明 |
|---|---|---|
| 早高峰开始 | 08:00 | 自动进入早高峰模式 |
| 早高峰结束 | 09:30 | 自动退出早高峰模式 |
| 中高峰开始 | 11:30 | 自动进入中高峰模式 |
| 中高峰结束 | 14:00 | 自动退出中高峰模式 |
| 晚高峰开始 | 17:30 | 自动进入晚高峰模式 |
| 晚高峰结束 | 19:00 | 自动退出晚高峰模式 |
7.2 调度参数
| 参数名称 | 默认值 | 说明 |
|---|---|---|
| 满载阈值 | 95% | 超过此负载不响应新呼叫 |
| 远距离阈值 | 10层 | 超过此楼层差降低调度优先级 |
| 单电梯最大任务数 | 5个 | 避免单台电梯过载 |
| 机器人专用电梯 | 无 | 可配置机器人专用电梯ID |
| VIP楼层 | 可配置 | 支持多楼层VIP设置 |

八、安全与异常处理
8.1 紧急呼叫处理
- 优先级最高,立即响应
- 切断所有其他指令
- 触发声光报警
- 通知物业管理中心
8.2 电梯故障处理
- 故障电梯自动退出调度队列
- 故障信息实时上报
- 自动调度其他电梯接管任务
- 支持远程故障诊断
8.3 权限验证失败处理
- 刷卡失败:提示重新刷卡
- 二维码无效:提示联系管理员
- 人脸识别失败:提供备用验证方式
- 连续失败3次:锁定权限并通知管理员
九、实施建议
9.1 分阶段实施
- 第一阶段:基础调度功能(普通外呼响应)
- 第二阶段:VIP功能(权限验证+优先调度)
- 第三阶段:机器人接口(SDK开发+设备接入)
- 第四阶段:高峰归底(自动运力优化)
9.2 测试验证
- 单机功能测试
- 多机联动测试
- 压力测试(高峰期模拟)
- 异常场景测试
- 安全性测试
十、附录
10.1 术语表
- 内外呼:电梯外部的呼叫按钮和轿厢内部的楼层按钮
- 指令堆栈:电梯待执行的指令队列
- 指令就近原则:优先调度距离最近的电梯
- 归底:电梯返回一楼待命的操作
- AGV:自动导引车(Automated Guided Vehicle)
- AMR:自主移动机器人(Autonomous Mobile Robot)
- DA:多奥简称
- SDK:接口
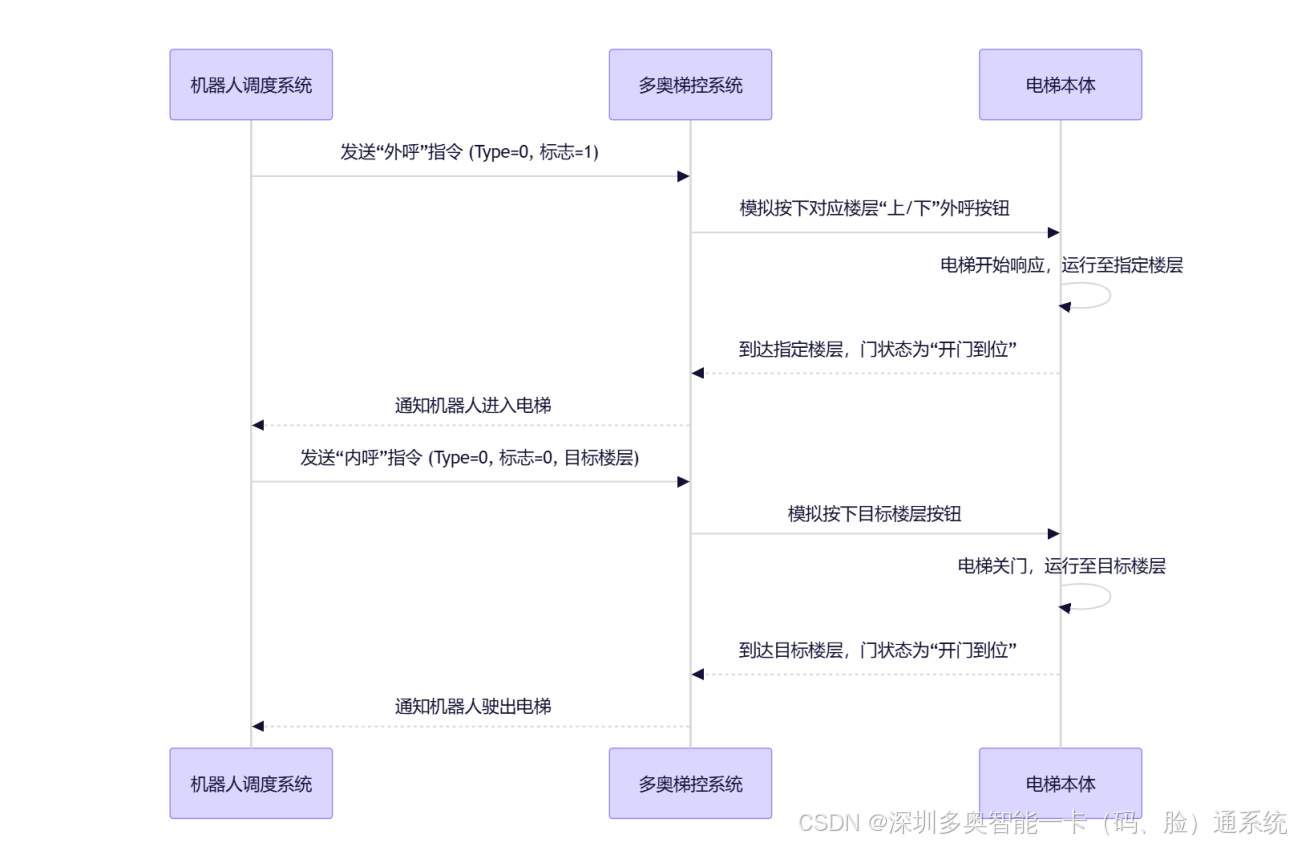
sequenceDiagram
participant R as 机器人调度系统
participant T as 多奥梯控系统
participant E as 电梯本体
R->>T: 发送“外呼”指令 (Type=0, 标志=1)
T->>E: 模拟按下对应楼层“上/下”外呼按钮
E->>E: 电梯开始响应,运行至指定楼层
E-->>T: 到达指定楼层,门状态为“开门到位”
T-->>R: 通知机器人进入电梯
R->>T: 发送“内呼”指令 (Type=0, 标志=0, 目标楼层)
T->>E: 模拟按下目标楼层按钮
E->>E: 电梯关门,运行至目标楼层
E-->>T: 到达目标楼层,门状态为“开门到位”
T-->>R: 通知机器人驶出电梯

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐


 16
16 0
0- 0



 已为社区贡献21条内容
已为社区贡献21条内容

所有评论(0)