西门子PLC S7 - 1200程序实例分享
西门子PLC S7-1200程序实例,博图版本V15,仅供电气编程者学习借鉴,如有需要也可帮忙代写程序1,西门子1200与安川机器人TCP/IP通讯,包含机器人GSD文件;2,西门子1200控制6轴伺服电机,四台台脉冲控制台达B2伺服,两台PN通讯控制西门子V90伺服电机;3,两台西门子1200开放式通讯交互数据联动;4,与4台位移传感器modbus485轮询读取参数;5,本程序为本人自己编写,仅
西门子PLC S7-1200程序实例,博图版本V15,仅供电气编程者学习借鉴,如有需要也可帮忙代写程序 1,西门子1200与安川机器人TCP/IP通讯,包含机器人GSD文件; 2,西门子1200控制6轴伺服电机,四台台脉冲控制台达B2伺服,两台PN通讯控制西门子V90伺服电机; 3,两台西门子1200开放式通讯交互数据联动; 4,与4台位移传感器modbus485轮询读取参数; 5,本程序为本人自己编写,仅用于学习探讨。
嘿,电气编程的小伙伴们!今天来给大家分享一些西门子S7 - 1200的程序实例,基于博图V15版本哦,希望能给大家的学习和工作带来帮助。这些程序都是我自己编写的,主要用于学习探讨,仅供各位借鉴~
一、西门子1200与安川机器人TCP/IP通讯
这部分涉及到机器人GSD文件的使用。首先得把安川机器人的GSD文件导入到博图软件中,这样才能让西门子1200识别机器人。
在博图里,操作步骤大概是这样:打开“设备和网络”界面,在“选项”菜单里选择“管理通用站描述文件(GSD)”,然后将安川机器人对应的GSD文件导入。
导入后,在硬件组态中就能添加安川机器人设备啦。接下来就是通讯程序部分,简单示例代码如下:
// 定义通讯相关变量
VAR
tcp_connection : TCON;
status : INT;
END_VAR
// 建立TCP连接
CALL "TCON"
CONNECT := tcp_connection,
REQ := TRUE,
ID := W#16#100,
LOCAL_PORT := 102,
REMOTE_ADDR := '192.168.0.10', // 假设机器人IP
REMOTE_PORT := 8080,
STATUS := status;这里通过“TCON”指令建立与安川机器人的TCP连接,其中CONNECT指定连接参数结构体,REQ为请求连接信号,ID是连接标识,LOCALPORT为本机端口,REMOTEADDR为机器人IP地址,REMOTE_PORT为机器人开放的通讯端口。通过STATUS可以获取连接状态,根据状态值来判断连接是否成功。
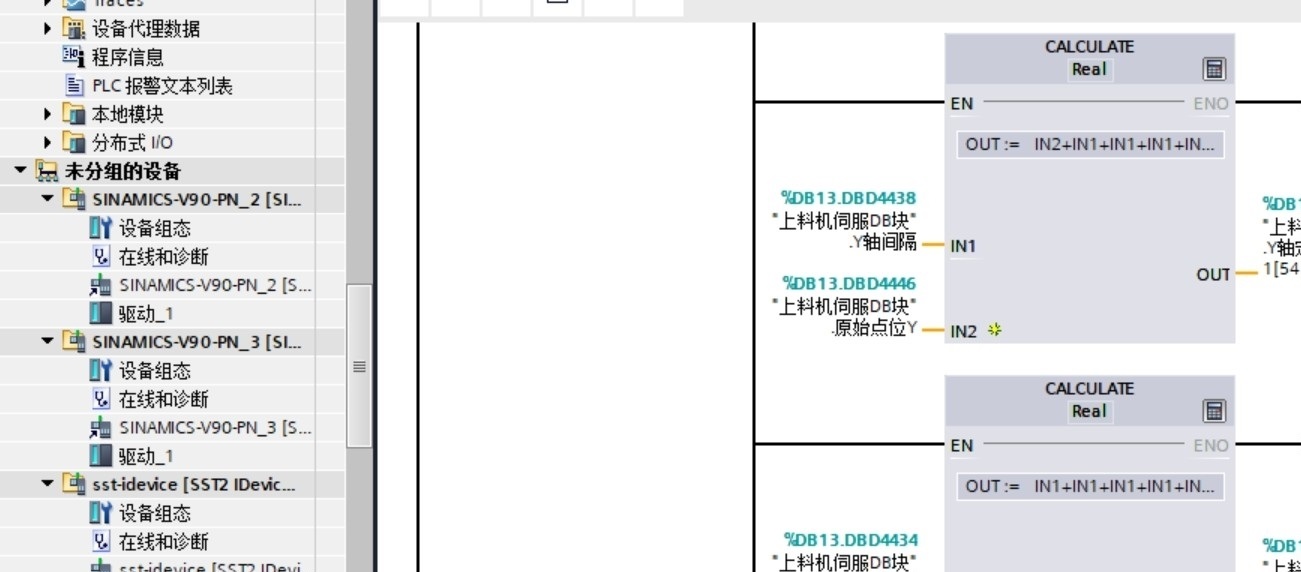
二、西门子1200控制6轴伺服电机
这里分为两部分,四台台脉冲控制台达B2伺服,两台PN通讯控制西门子V90伺服电机。
(一)脉冲控制台达B2伺服
对于台达B2伺服,我们主要通过发送脉冲来控制其运动。在S7 - 1200中,可以使用运动控制指令库。
// 定义脉冲输出相关变量
VAR
axis1_pulse : PTO_CTRL;
axis1_speed : DINT := 1000; // 速度设定
axis1_distance : DINT := 5000; // 距离设定
END_VAR
// 初始化脉冲输出
CALL "PTO_CTRL"
AXIS := axis1_pulse,
ENABLE := TRUE,
DISABLE := FALSE,
ERROR := FALSE,
POS_TYPE := 1;
// 启动相对定位运动
CALL "MC_MoveRelative"
AXIS := axis1_pulse,
SPEED := axis1_speed,
DISTANCE := axis1_distance,
OVER_VEL := 100,
OVER_ACC := 100,
OVER_DEC := 100,
JERK := 100;在这段代码里,首先通过“PTOCTRL”指令初始化脉冲输出轴,然后利用“MCMoveRelative”指令启动相对定位运动,设定好速度、距离等参数。
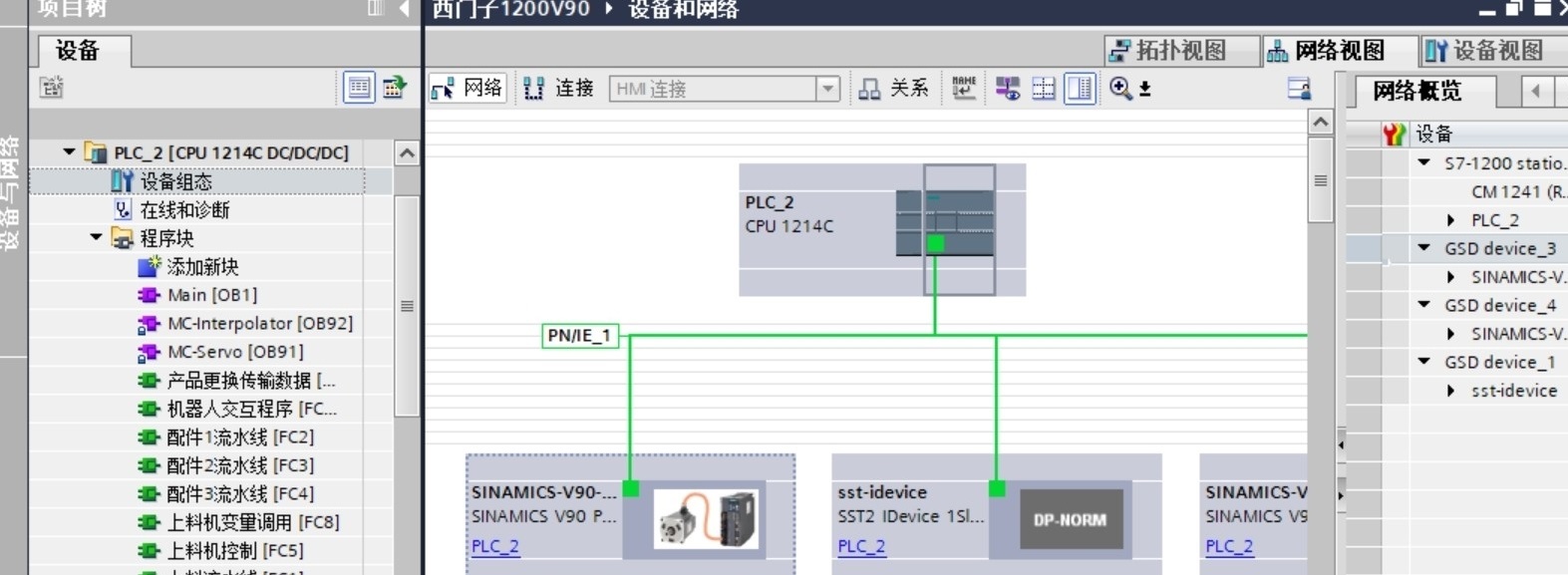
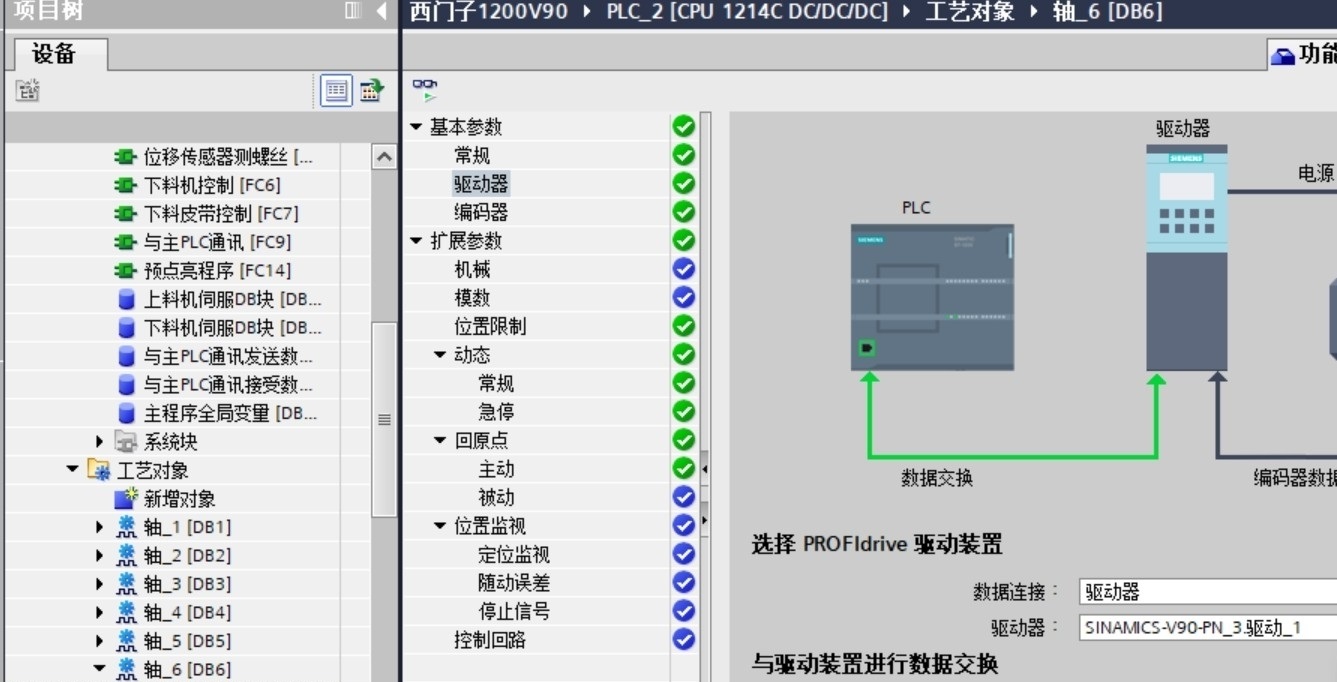
(二)PN通讯控制西门子V90伺服电机
对于西门子V90通过PN通讯控制,硬件组态时要正确配置V90设备,设置好IP地址等参数。
西门子PLC S7-1200程序实例,博图版本V15,仅供电气编程者学习借鉴,如有需要也可帮忙代写程序 1,西门子1200与安川机器人TCP/IP通讯,包含机器人GSD文件; 2,西门子1200控制6轴伺服电机,四台台脉冲控制台达B2伺服,两台PN通讯控制西门子V90伺服电机; 3,两台西门子1200开放式通讯交互数据联动; 4,与4台位移传感器modbus485轮询读取参数; 5,本程序为本人自己编写,仅用于学习探讨。
程序中控制代码示例:
// 定义V90控制相关变量
VAR
v90_axis : AXIS_PTO;
v90_position : DINT;
END_VAR
// 运动控制指令
CALL "MC_MoveAbsolute"
AXIS := v90_axis,
POSITION := v90_position,
VELOCITY := 5000,
OVER_VEL := 100,
OVER_ACC := 100,
OVER_DEC := 100,
JERK := 100;这里“MC_MoveAbsolute”指令用于控制V90伺服电机进行绝对定位运动,通过修改POSITION值来设定目标位置。
三、两台西门子1200开放式通讯交互数据联动
这部分实现两台1200之间的数据交互。我们可以使用开放式用户通讯(OUC)。
假设主站代码如下:
// 定义通讯变量
VAR
send_data : ARRAY[0..9] OF INT := [1, 2, 3, 4, 5, 6, 7, 8, 9, 10];
ou_connection : TCON;
ou_status : INT;
END_VAR
// 建立连接
CALL "TCON"
CONNECT := ou_connection,
REQ := TRUE,
ID := W#16#200,
LOCAL_PORT := 2000,
REMOTE_ADDR := '192.168.0.20', // 从站IP
REMOTE_PORT := 2001,
STATUS := ou_status;
// 发送数据
IF ou_status = 0 THEN
CALL "TSEND_C"
CONNECT := ou_connection,
REQ := TRUE,
DATA := send_data,
DONE := done_send,
ERROR := error_send;
END_IF从站代码类似,只是接收数据部分:
// 定义接收变量
VAR
receive_data : ARRAY[0..9] OF INT;
ou_connection : TCON;
ou_status : INT;
END_VAR
// 建立连接
CALL "TCON"
CONNECT := ou_connection,
REQ := TRUE,
ID := W#16#200,
LOCAL_PORT := 2001,
REMOTE_ADDR := '192.168.0.10', // 主站IP
REMOTE_PORT := 2000,
STATUS := ou_status;
// 接收数据
IF ou_status = 0 THEN
CALL "TRCV_C"
CONNECT := ou_connection,
NDR := ndr_receive,
DATA := receive_data,
ERROR := error_receive;
END_IF主站通过“TSENDC”指令发送数据数组senddata,从站通过“TRCVC”指令接收数据并存入receivedata数组,通过连接状态判断以及相应标志位来确保数据的正确收发。
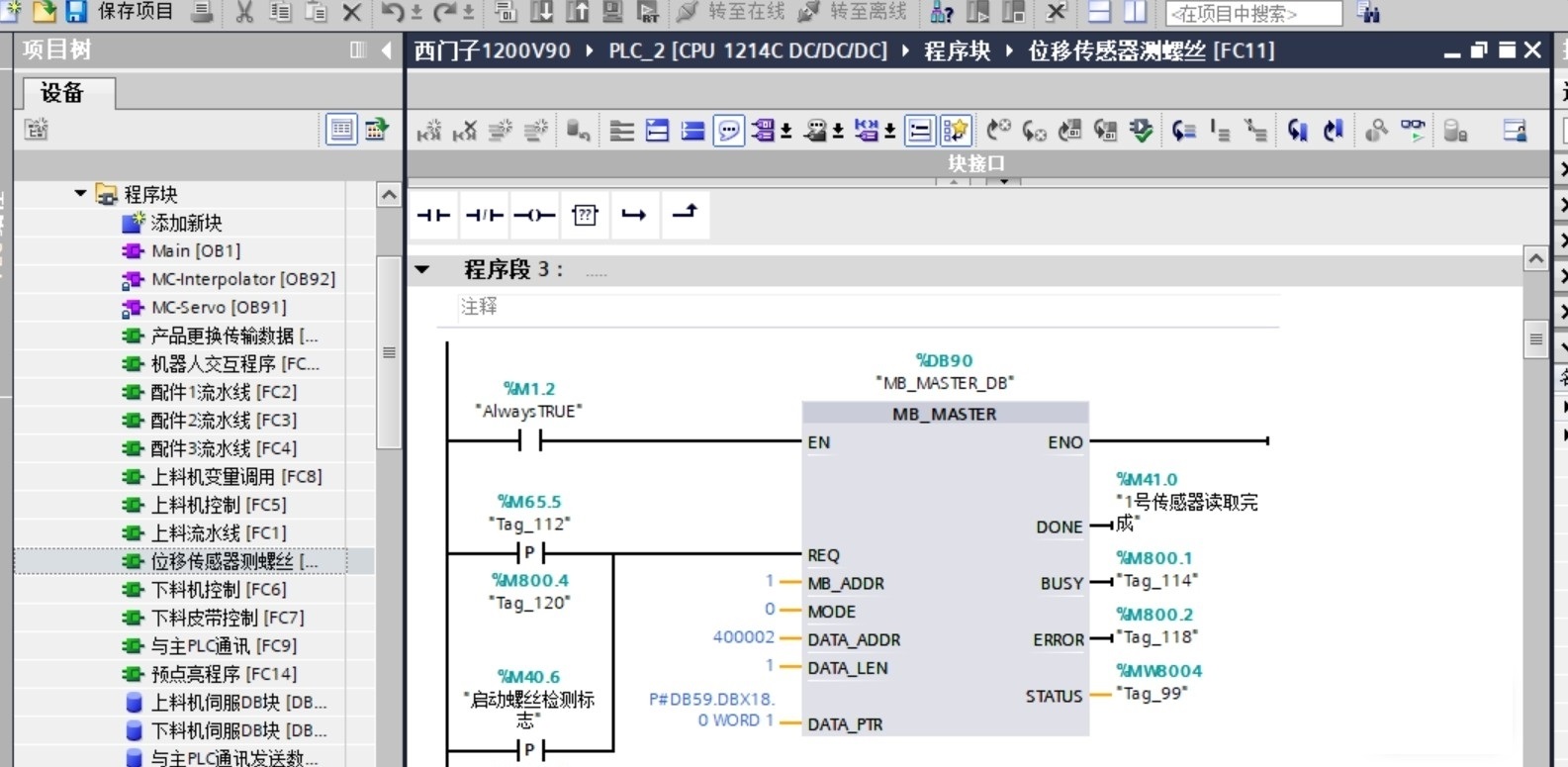
四、与4台位移传感器modbus485轮询读取参数
要实现与位移传感器的Modbus 485通讯,首先硬件上要接好485通讯模块。在程序里,使用Modbus RTU通讯指令库。
// 定义Modbus相关变量
VAR
mb_master : MB_MASTER;
sensor1_value : INT;
sensor2_value : INT;
sensor3_value : INT;
sensor4_value : INT;
poll_index : INT := 0;
END_VAR
// Modbus轮询读取
CASE poll_index OF
0:
CALL "MB_MASTER"
MB_MODE := 1,
REQ := TRUE,
ID := 1, // 传感器1地址
ADDR := 40001,
NUM := 1,
DATA_PTR := ADR(sensor1_value),
DONE := done1,
ERROR := error1;
IF done1 OR error1 THEN
poll_index := 1;
END_IF
1:
CALL "MB_MASTER"
MB_MODE := 1,
REQ := TRUE,
ID := 2, // 传感器2地址
ADDR := 40001,
NUM := 1,
DATA_PTR := ADR(sensor2_value),
DONE := done2,
ERROR := error2;
IF done2 OR error2 THEN
poll_index := 2;
END_IF
2:
CALL "MB_MASTER"
MB_MODE := 1,
REQ := TRUE,
ID := 3, // 传感器3地址
ADDR := 40001,
NUM := 1,
DATA_PTR := ADR(sensor3_value),
DONE := done3,
ERROR := error3;
IF done3 OR error3 THEN
poll_index := 3;
END_IF
3:
CALL "MB_MASTER"
MB_MODE := 1,
REQ := TRUE,
ID := 4, // 传感器4地址
ADDR := 40001,
NUM := 1,
DATA_PTR := ADR(sensor4_value),
DONE := done4,
ERROR := error4;
IF done4 OR error4 THEN
poll_index := 0;
END_IF
END_CASE这里通过一个pollindex变量来实现轮询,依次读取4个不同地址的位移传感器数据。每次调用“MBMASTER”指令,根据返回的DONE或ERROR标志位来决定是否切换到下一个传感器的读取。
以上就是这次分享的西门子S7 - 1200的几个程序实例啦。如果大家在学习过程中有需要,也可以找我帮忙代写程序哦。希望这些内容能对大家有所启发,一起在电气编程的世界里探索~

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐
 10
10 0
0- 0



 已为社区贡献4条内容
已为社区贡献4条内容

所有评论(0)