大型项目包膜机程序:西门子PLC 的巅峰之旅
大型项目包膜机程序,西门子plc巅峰应用,气缸,通讯,机械手,模拟量等,各种FB块,可用来参考和学习软件博图,威纶通触摸屏,网络结构可参考图一,PTO控制20个轴,160个气缸,控制2台机器人。5台PLC智能IO通讯,ModbusRTU通讯轮询,完整威纶通触摸屏程序!在工业自动化领域,大型项目的包膜机程序堪称是技术融合与创新的典范。今天就来和大家分享一下这个基于西门子 PLC 的超酷炫项目,里面涉
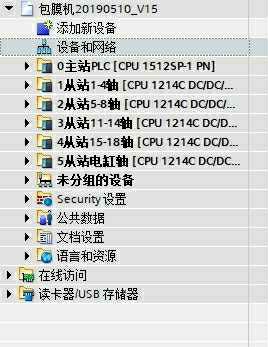
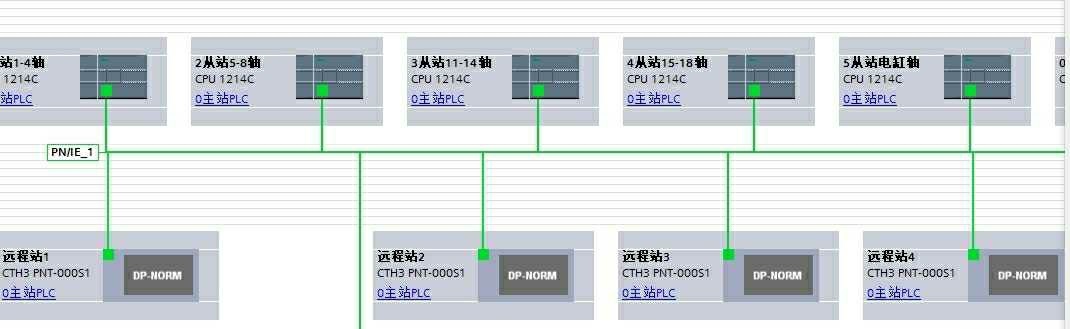
大型项目包膜机程序,西门子plc巅峰应用,气缸,通讯,机械手,模拟量等,各种FB块,可用来参考和学习 软件博图,威纶通触摸屏,网络结构可参考图一,PTO控制20个轴,160个气缸,控制2台机器人。 5台PLC智能IO通讯,ModbusRTU通讯轮询,完整威纶通触摸屏程序!
在工业自动化领域,大型项目的包膜机程序堪称是技术融合与创新的典范。今天就来和大家分享一下这个基于西门子 PLC 的超酷炫项目,里面涉及到气缸、通讯、机械手、模拟量等关键元素,还有各种实用的 FB 块,绝对是学习和参考的宝藏。
一、整体架构与软件平台
这个项目采用的是软件博图,它在西门子 PLC 编程中可是相当强大的存在。搭配威纶通触摸屏,为操作人员提供了直观便捷的交互界面。从网络结构来看,参考图一(这里假设大家能看到对应的网络架构图啦),整个系统有条不紊地运行着。
二、轴与气缸的精确控制
PTO(脉冲串输出)控制可是一大亮点,竟然能精准控制 20 个轴,还有多达 160 个气缸。这意味着什么呢?想象一下,在包膜机工作时,每个轴和气缸都能按照预设的程序协同运作,实现复杂的包装动作。

下面简单看一段关于轴控制的示例代码(这里以西门子 S7 - 1200 为例,假设轴控制相关的 FB 块已经创建好):
// 调用轴控制的 FB 块
CALL "AxisControlFB"
Axis := "Axis1" // 定义要控制的轴
Command := "MoveRelative" // 这里假设是相对运动指令
Distance := 100.0 // 移动距离 100 个单位
Velocity := 50.0 // 速度 50 个单位/秒在这段代码里,通过调用自定义的 “AxisControlFB” 功能块,我们向指定的轴 “Axis1” 发送相对运动指令,设定了移动距离和速度。FB 块就像是一个功能集合体,把轴控制中常用的操作封装起来,方便在程序中复用,大大提高了编程效率。
对于气缸的控制,其实也是类似的逻辑。每个气缸都对应着 PLC 的一个输出点,通过控制这些输出点的通断,就能控制气缸的伸出和缩回。比如:
// 控制气缸 1 伸出
"Q0.0" := 1;
// 控制气缸 1 缩回
"Q0.0" := 0;通过简单的赋值语句,就能轻松实现对气缸动作的控制。
三、机器人与多 PLC 通讯
这个项目还肩负着控制 2 台机器人的重任。机器人可是工业自动化的得力助手,它们在包膜过程中能完成一些更为复杂和精细的操作。
大型项目包膜机程序,西门子plc巅峰应用,气缸,通讯,机械手,模拟量等,各种FB块,可用来参考和学习 软件博图,威纶通触摸屏,网络结构可参考图一,PTO控制20个轴,160个气缸,控制2台机器人。 5台PLC智能IO通讯,ModbusRTU通讯轮询,完整威纶通触摸屏程序!
同时,还有 5 台 PLC 进行智能 IO 通讯,并且采用 Modbus RTU 通讯轮询方式。Modbus RTU 通讯在工业领域应用非常广泛,它以其简洁高效的特点,让不同设备之间能够顺畅地交换数据。
下面看看 Modbus RTU 通讯轮询的简单代码框架(以 S7 - 1500 为例):
// 定义 Modbus RTU 通讯相关变量
VAR
MB_Master : "MB_COMM_LOAD" // 通讯加载块
MB_Slave_1 : "MB_MASTER" // 从站 1 的通讯块
MB_Slave_2 : "MB_MASTER" // 从站 2 的通讯块
// 以此类推定义更多从站通讯块
Data_Received : ARRAY[1..100] OF BYTE // 接收数据数组
END_VAR
// 初始化通讯加载块
MB_Master(
COMM_PORT := "COM1" // 通讯端口
BAUD := 9600 // 波特率
PARITY := "None" // 奇偶校验
);
// 轮询从站 1
MB_Slave_1(
REQ := RisingEdge(Clock) // 上升沿触发请求
MB_ADDR := 1 // 从站地址 1
READ_ADDR := 40001 // 读取地址
READ_LEN := 10 // 读取长度
DATA_PTR := Data_Received // 数据指针指向接收数组
);
// 轮询从站 2 类似操作在这段代码中,首先定义了通讯所需的各种变量,包括通讯加载块和各个从站的通讯块,还有用于接收数据的数组。然后初始化通讯加载块,设置通讯端口、波特率和奇偶校验等参数。接着通过轮询的方式,依次与各个从站进行通讯,从指定地址读取数据并存入接收数组。这样就能实现多台 PLC 之间稳定可靠的数据交互啦。
四、威纶通触摸屏程序
项目中还包含完整的威纶通触摸屏程序。触摸屏就像是人与设备沟通的桥梁,操作人员可以通过它直观地监控设备运行状态、设置参数等。
威纶通触摸屏的编程主要是在其对应的软件环境中进行,通过创建各种画面元素,如按钮、指示灯、数值输入框等,并与 PLC 中的变量建立关联。比如,想要在触摸屏上显示某个气缸的状态,可以这样操作:在触摸屏画面上添加一个指示灯,然后将其状态变量关联到 PLC 中控制该气缸输出点的变量上。这样,当气缸动作时,触摸屏上的指示灯也会相应地亮起或熄灭,操作人员就能一目了然地了解设备状态了。

总之,这个大型项目包膜机程序融合了多种先进技术,无论是对于西门子 PLC 的进阶学习,还是实际项目开发,都具有极高的参考价值。希望大家能从中学到有用的知识,在工业自动化的道路上越走越远!

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐


 24
24 0
0- 0



 已为社区贡献5条内容
已为社区贡献5条内容

所有评论(0)