西门子S7-1515-2pn项目实战:多设备集成与编程全解析
S7-1515-2pn 带pn总线设备有 库卡机器人 西门子S120伺服驱动器 sew伺服驱动器 pn绝对值编码器SSI编码器应用 7个触摸屏包含程序 一个上位机组态画面包含程序 包含graph语言编写的程序 STLSCL语言编写的程序模拟量采集 是学习西门子工艺对象组态运动控制 机器人等不可多得呢学习资料!全部程序均调试通过可以立即应用!
S7-1515-2pn 带pn总线设备有 库卡机器人 西门子S120伺服驱动器 sew伺服驱动器 pn绝对值编码器 SSI编码器应用 7个触摸屏包含程序 一个上位机组态画面包含程序 包含graph语言编写的程序 STL SCL语言编写的程序 模拟量采集 是学习西门子工艺对象组态运动控制 机器人等不可多得呢学习资料! 全部程序均调试通过可以立即应用 !
最近在研究西门子自动化系统,发现了一份超棒的学习资料,基于S7-1515-2pn,集成了各种PN总线设备,简直是学习西门子工艺对象组态、运动控制以及机器人相关知识的宝藏!今天就来跟大家分享一下其中的精彩内容。
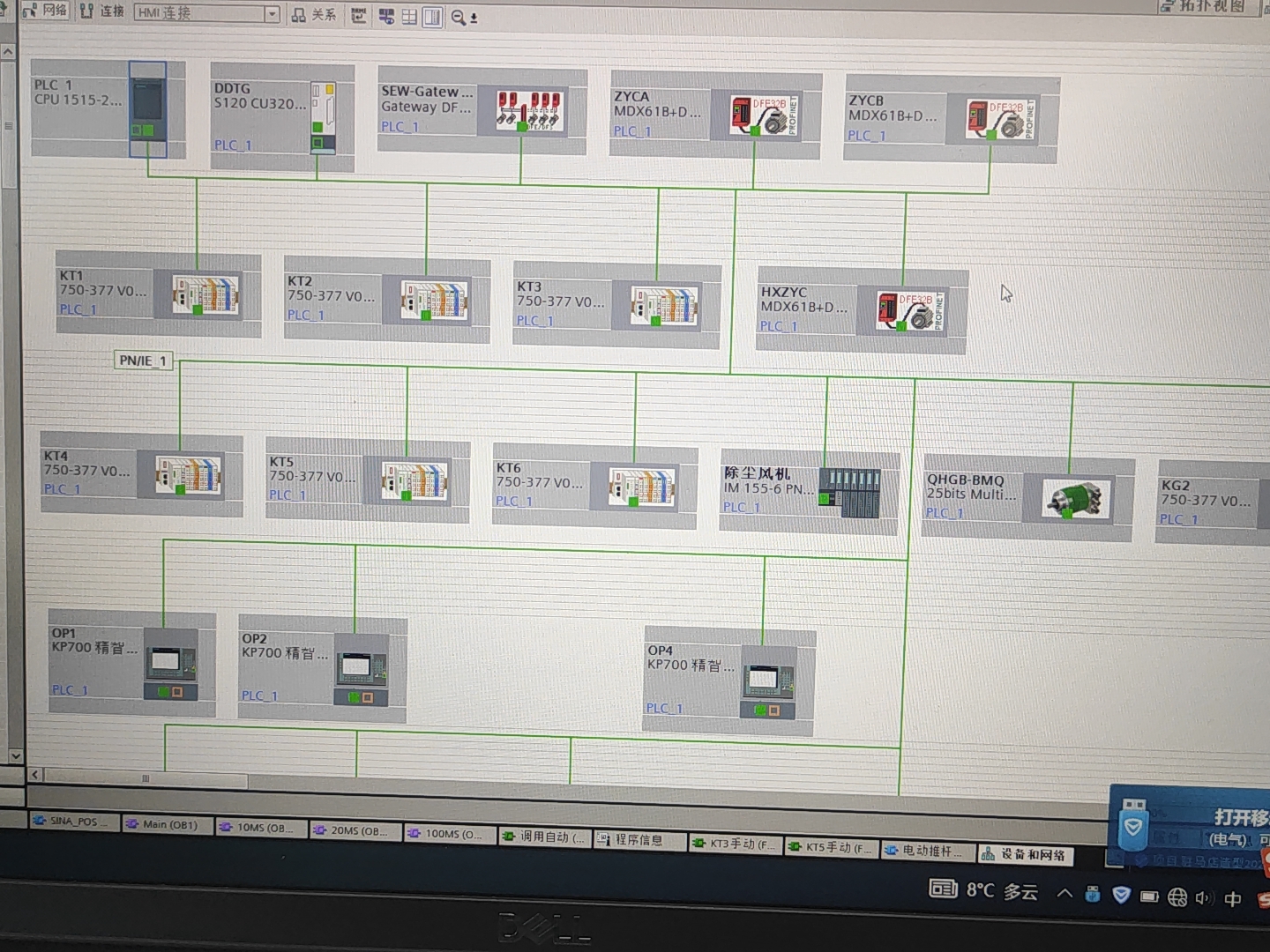
丰富的设备集成
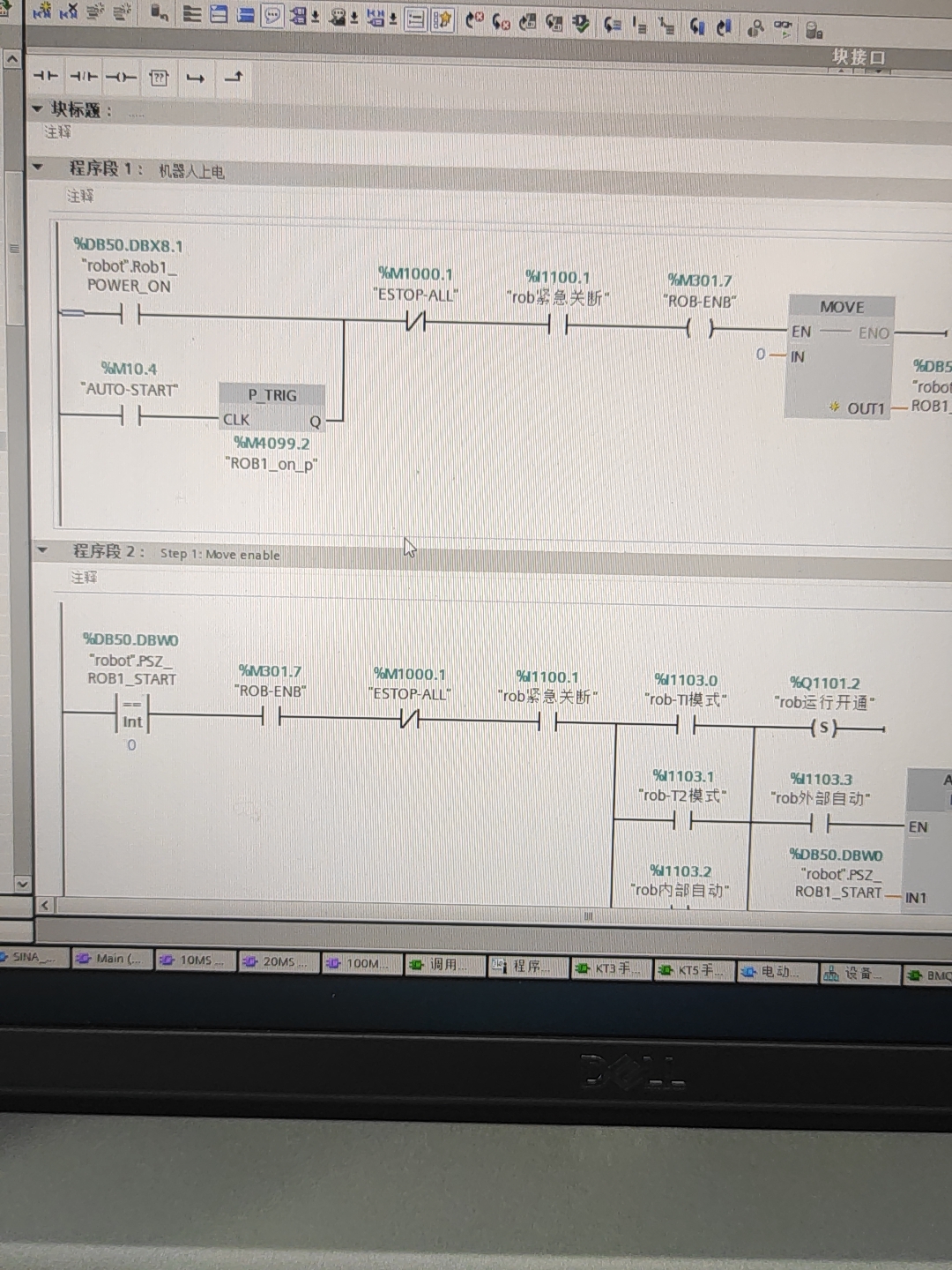
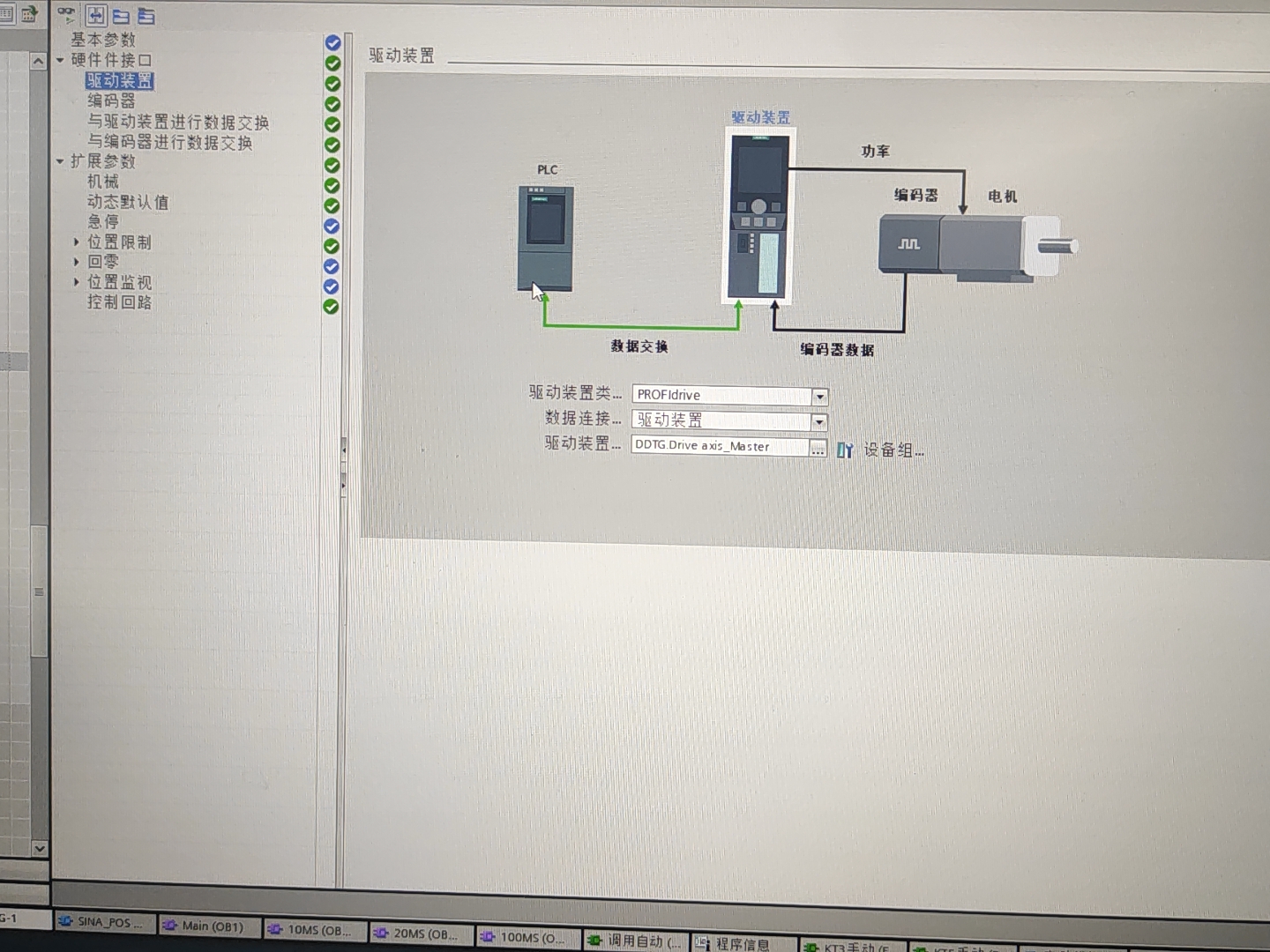
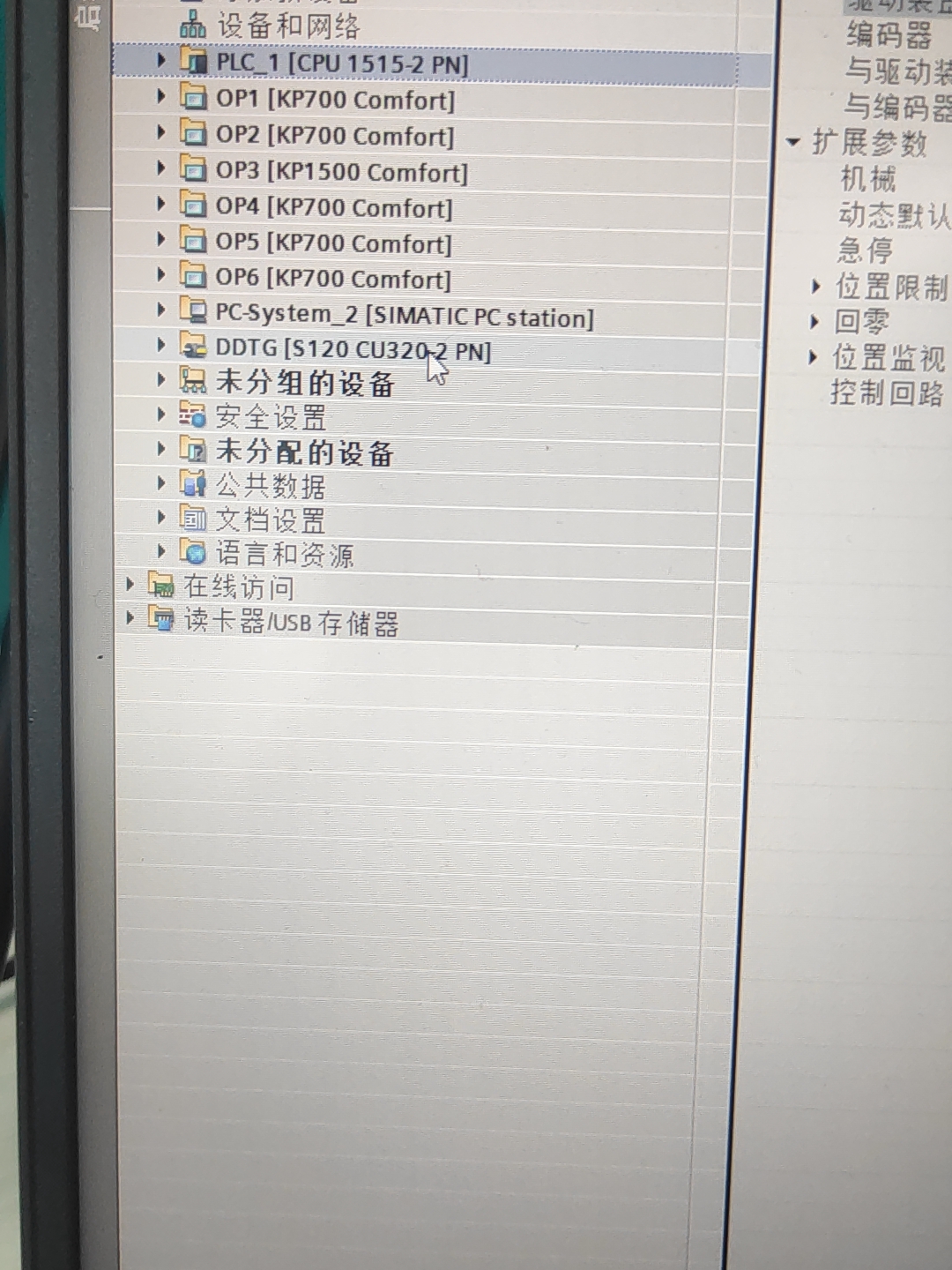
这个项目里连接了各式各样的PN总线设备,有大名鼎鼎的库卡机器人,西门子自家的S120伺服驱动器,还有sew伺服驱动器 ,同时配备了PN绝对值编码器以及SSI编码器。如此多样化的设备集成,能让我们深入了解不同设备之间如何协同工作。
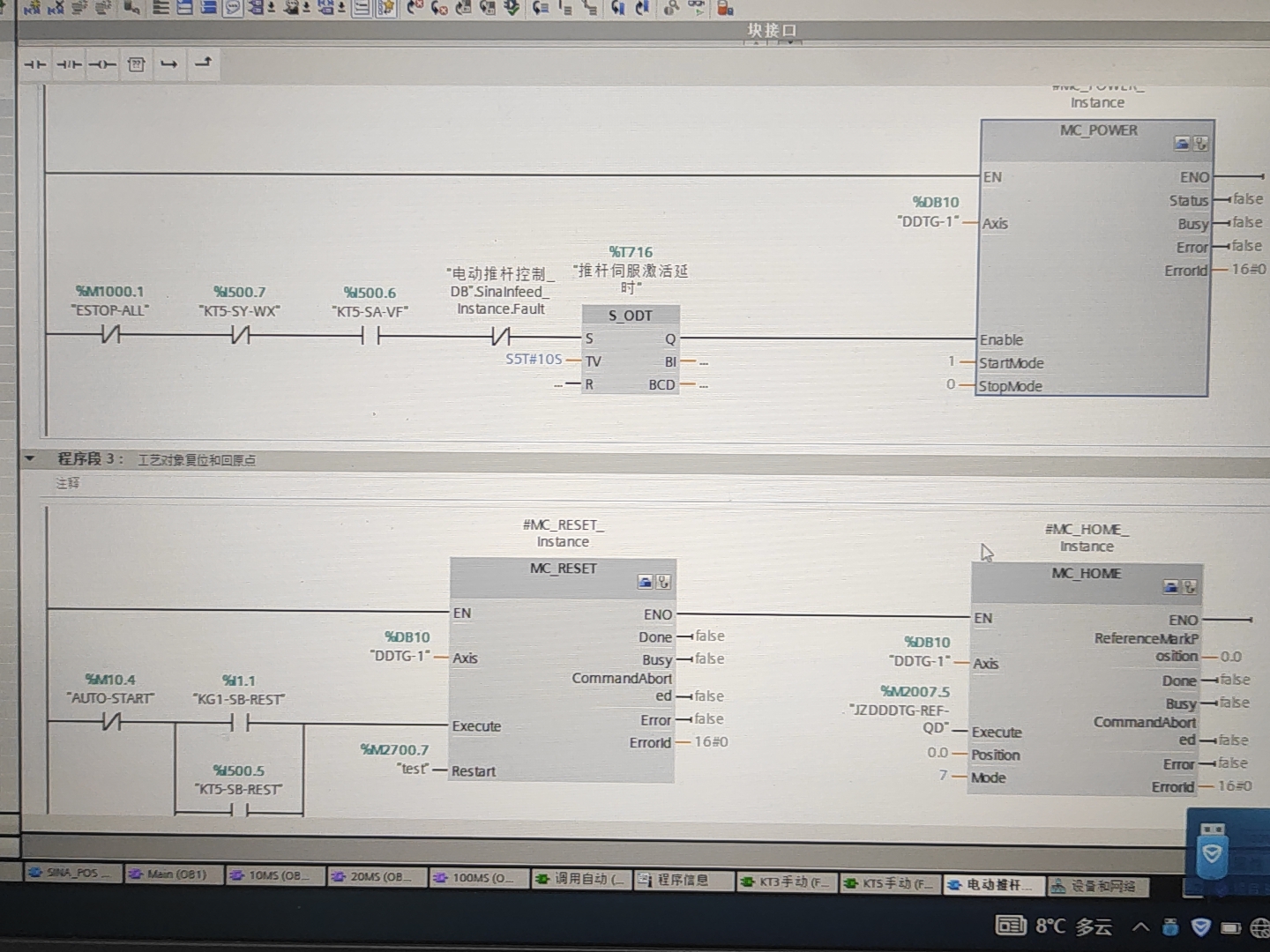
就拿西门子S120伺服驱动器来说,在硬件组态的时候,需要在TIA Portal中准确添加对应的设备型号。比如在OB1组织块中,我们可以编写如下简单代码来初始化驱动器相关参数:
// 定义数据块
DB1.DBW0 := 16#1234; // 假设设置驱动器特定参数值这里通过给数据块DB1的字变量DBW0赋值,来设置驱动器的某个参数。不同的参数有不同的含义和取值范围,这就需要我们深入了解S120驱动器手册了。
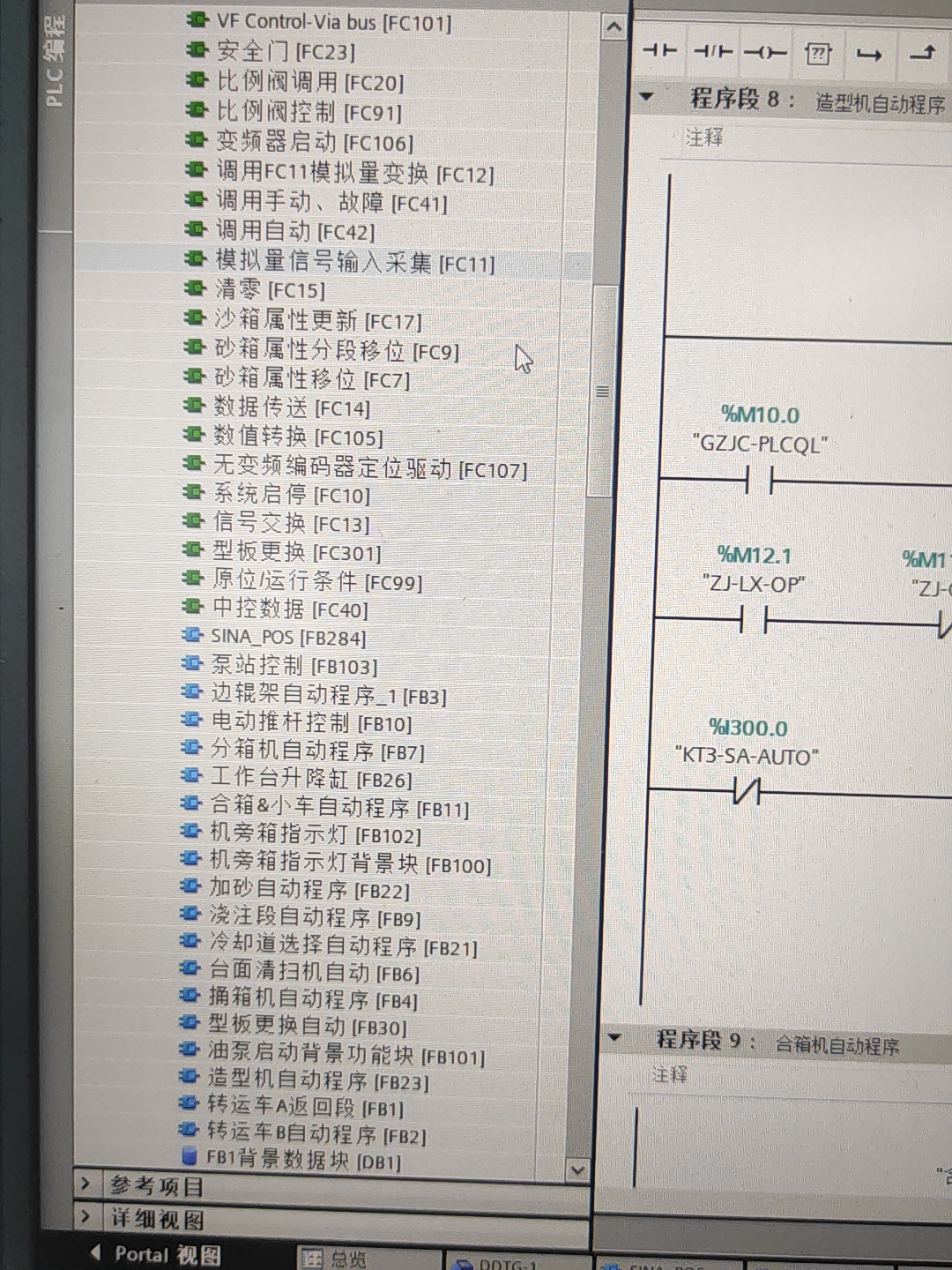
多样的编程实现
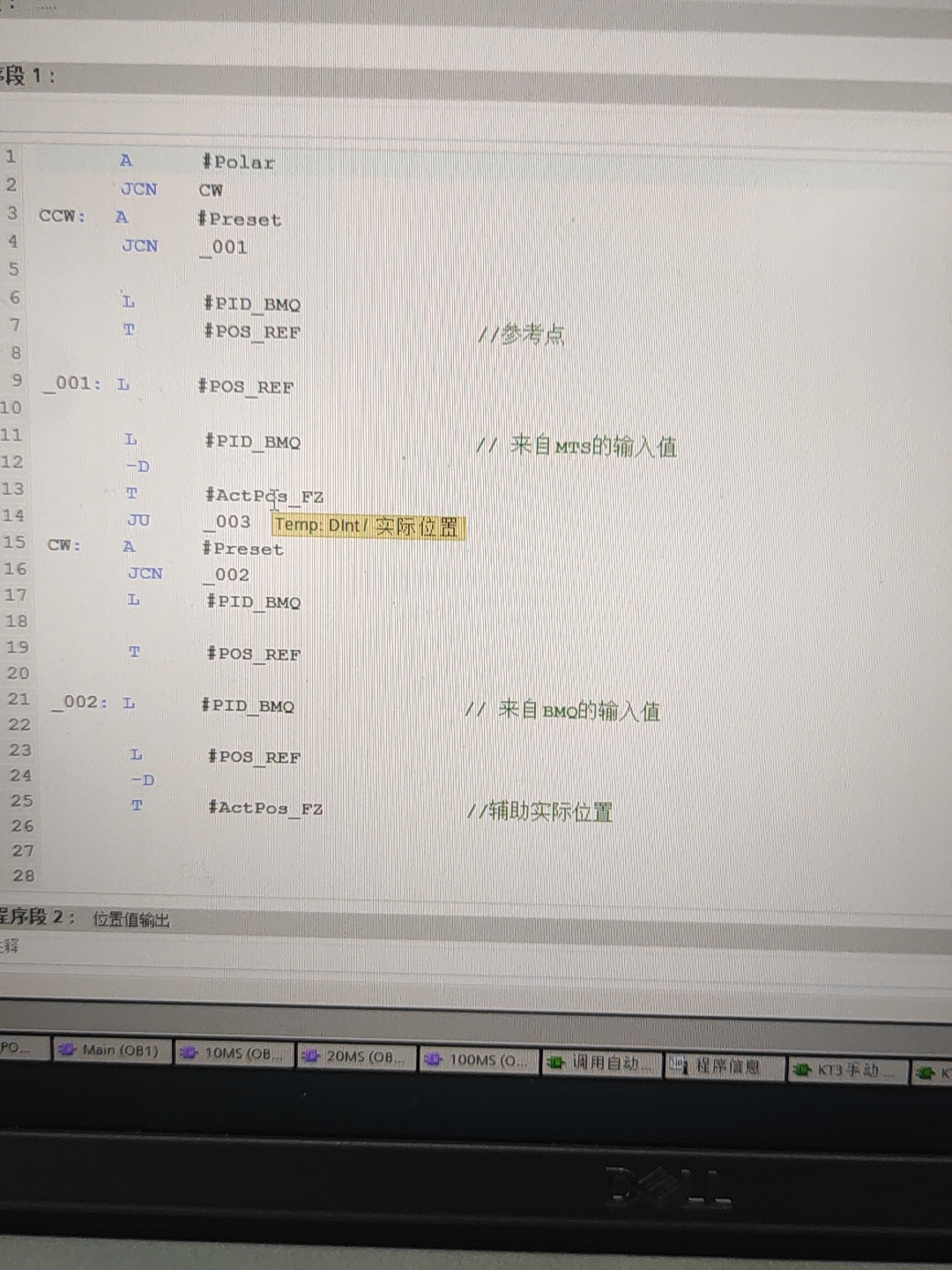
项目中包含了Graph语言编写的程序,STL以及SCL语言编写的程序,真可谓是编程大杂烩。Graph语言对于顺序控制任务特别友好,它以一种直观的流程图方式来描述程序逻辑。
例如,下面是一段简单的Graph程序示例,用于控制一个电机顺序启停:
NETWORK 1:
STEP 1:
SET M0.0; // 启动电机标志位置位
JCN NEXT;
NEXT:
STEP 2:
A M0.0;
= Q0.0; // 输出控制电机
JCN END;
END:这段Graph程序很清晰,第一步设置启动标志,第二步根据标志控制电机输出。
S7-1515-2pn 带pn总线设备有 库卡机器人 西门子S120伺服驱动器 sew伺服驱动器 pn绝对值编码器 SSI编码器应用 7个触摸屏包含程序 一个上位机组态画面包含程序 包含graph语言编写的程序 STL SCL语言编写的程序 模拟量采集 是学习西门子工艺对象组态运动控制 机器人等不可多得呢学习资料! 全部程序均调试通过可以立即应用 !
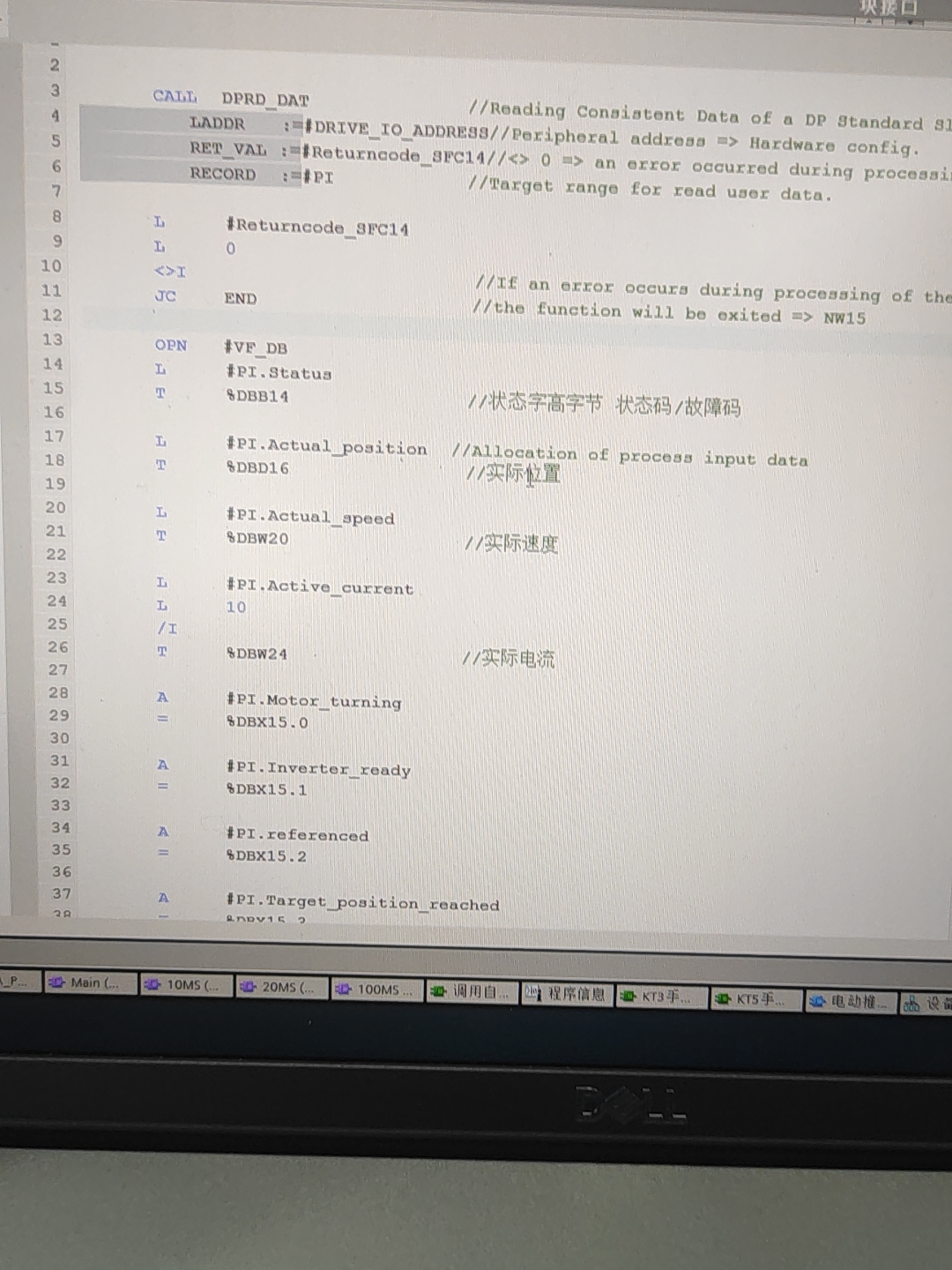
而STL语言则更加底层,对硬件资源的操作更加直接。比如要读取一个模拟量输入值到累加器1中,可以这样写:
L PIW256; // 将模拟量输入通道256的值加载到累加器1SCL语言则类似于高级编程语言,适合复杂逻辑和算法的实现。例如下面这段SCL代码实现了一个简单的PID控制算法:
VAR
Setpoint : REAL; // 设定值
ProcessValue : REAL; // 过程值
Output : REAL; // 输出值
Kp, Ki, Kd : REAL; // PID参数
Integral : REAL;
PreviousError : REAL;
END_VAR;
Error := Setpoint - ProcessValue;
Integral := Integral + Error * CycleTime;
Derivative := (Error - PreviousError) / CycleTime;
Output := Kp * Error + Ki * Integral + Kd * Derivative;
PreviousError := Error;这里通过定义变量和公式计算,实现了一个基础的PID控制逻辑。
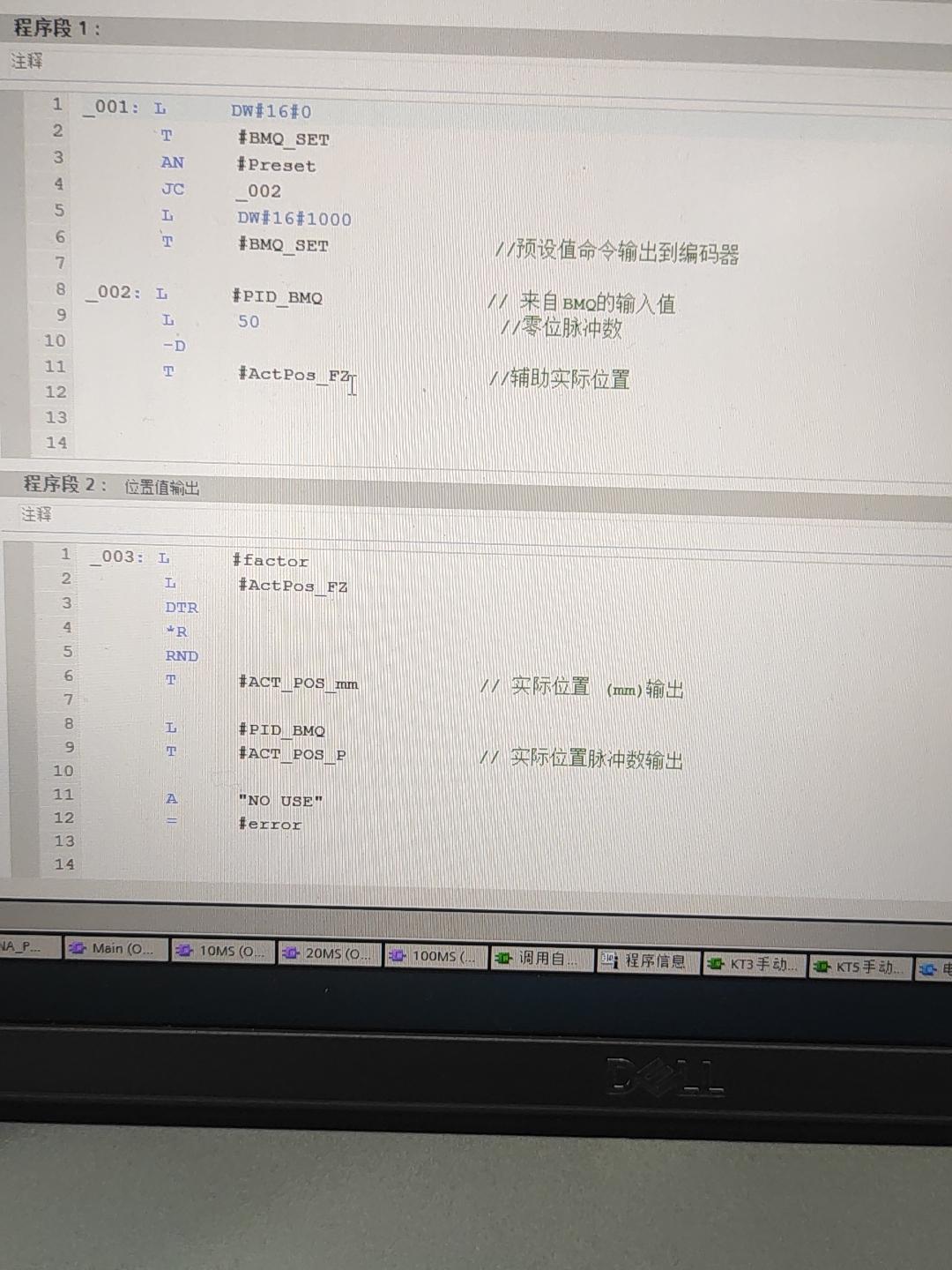
模拟量采集与应用
项目中的模拟量采集功能,是整个系统获取外部物理量信息的重要途径。例如通过读取模拟量输入模块的数值,来获取温度、压力等数据。结合前面提到的各种编程语言,就可以对采集到的数据进行处理和应用。
在SCL语言中,我们可以编写函数块来处理模拟量采集数据,如下:
FUNCTION_BLOCK AnalogProcessing
VAR_INPUT
AnalogValue : REAL; // 采集到的模拟量值
END_VAR;
VAR_OUTPUT
ProcessedValue : REAL; // 处理后的模拟量值
END_VAR;
VAR
MinValue : REAL := 0.0;
MaxValue : REAL := 100.0;
BEGIN
IF AnalogValue < MinValue THEN
ProcessedValue := MinValue;
ELSIF AnalogValue > MaxValue THEN
ProcessedValue := MaxValue;
ELSE
ProcessedValue := AnalogValue;
END_IF;
END_FUNCTION_BLOCK这个函数块对采集到的模拟量值进行简单的限幅处理,确保输出值在合理范围内。
人机交互界面
系统配备了7个触摸屏,每个触摸屏都有对应的程序,而且还有一个上位机组态画面并带有程序。这些界面为操作人员与系统之间提供了便捷的交互方式。
触摸屏程序可以通过图形化的编程界面,设置各种按钮、指示灯、数据显示等元素。而上位机组态画面则能实现更宏观的系统监控和管理,比如实时显示设备运行状态、历史数据查询等功能。
这份基于S7-1515-2pn的学习资料,所有程序均调试通过,可立即应用,无论是对于自动化领域的新手,还是想要深入研究西门子系统的老鸟,都是不可多得的宝贵资源。希望大家都能从中获取自己需要的知识,在自动化的世界里不断探索进步!

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐

 23
23 0
0- 0



 已为社区贡献4条内容
已为社区贡献4条内容

所有评论(0)