探索西门子 1200 码垛机与立体库码垛机程序
西门子1200码垛机程序和1200立体库码垛机带注释 ,程序结构清楚明了,注释齐全。程序 涉及到变频器,触摸屏,工业机器人,视觉相机的程序控制.modbus tcp通讯,SCL编程,支持博图15.1及以上版本。嘿,各位工控爱好者!今天咱们来聊聊西门子 1200 码垛机程序以及 1200 立体库码垛机程序,这可是涉及到变频器、触摸屏、工业机器人、视觉相机等多种设备控制的精彩内容,而且还包含 Modb
西门子1200码垛机程序和1200立体库码垛机带注释 ,程序结构清楚明了,注释齐全。 程序 涉及到变频器,触摸屏,工业机器人,视觉相机的程序控制.modbus tcp通讯,SCL编程,支持博图15.1及以上版本。
嘿,各位工控爱好者!今天咱们来聊聊西门子 1200 码垛机程序以及 1200 立体库码垛机程序,这可是涉及到变频器、触摸屏、工业机器人、视觉相机等多种设备控制的精彩内容,而且还包含 Modbus TCP 通讯和 SCL 编程,并且支持博图 15.1 及以上版本。
整体程序结构与注释的重要性
在开始研究具体代码之前,先说说程序结构和注释。一个好的程序,结构必须清楚明了,就像一座设计精良的建筑,各个部分分工明确,让人一目了然。而注释则像是建筑上的指示牌,告诉我们每个部分是做什么的,这样无论是自己后续维护,还是团队里的其他成员接手,都能快速上手。

西门子1200码垛机程序和1200立体库码垛机带注释 ,程序结构清楚明了,注释齐全。 程序 涉及到变频器,触摸屏,工业机器人,视觉相机的程序控制.modbus tcp通讯,SCL编程,支持博图15.1及以上版本。
下面给大家看一段简单的 SCL 代码示例,这是一个基本的启动停止控制逻辑,虽然简单,但能体现出注释的作用:
// 定义输入输出变量
VAR_INPUT
Start : BOOL; // 启动按钮信号
Stop : BOOL; // 停止按钮信号
END_VAR
VAR_OUTPUT
MotorRun : BOOL; // 电机运行信号
END_VAR
// 程序逻辑
IF Start THEN
MotorRun := TRUE; // 按下启动按钮,电机开始运行
ELSIF Stop THEN
MotorRun := FALSE; // 按下停止按钮,电机停止运行
END_IF;代码分析:在这段代码里,首先通过 VARINPUT 和 VAROUTPUT 定义了输入输出变量,并且给每个变量都加上了注释,说明这个变量代表的是什么信号。然后在程序逻辑部分,通过 IF - ELSIF - END_IF 语句实现了启动停止控制。当 Start 信号为 TRUE 时,MotorRun 信号变为 TRUE,电机开始运行;当 Stop 信号为 TRUE 时,MotorRun 信号变为 FALSE,电机停止运行。
Modbus TCP 通讯
在码垛机和立体库系统中,Modbus TCP 通讯可是非常重要的,它能让不同设备之间进行数据交换。下面是一段使用 SCL 实现 Modbus TCP 读取数据的代码示例:
// 定义 Modbus TCP 通讯相关变量
VAR
MB_CLIENT : TCON; // Modbus TCP 客户端连接块
MB_READ : MCRD; // Modbus TCP 读取功能块
ConnectionOK : BOOL; // 连接状态
ReadData : ARRAY[0..9] OF INT; // 读取的数据
END_VAR
// 建立 Modbus TCP 连接
MB_CLIENT(
CONN := TRUE,
CON_R := R_TRIG(CLK := NOT ConnectionOK),
CONN_DATA := '192.168.0.100':502, // 服务器 IP 地址和端口号
CONNECTED => ConnectionOK
);
// 读取数据
MB_READ(
EXEC := TRUE,
REQ_R := R_TRIG(CLK := ConnectionOK),
ID := 1, // 从站 ID
ADD := 0, // 起始地址
AMOUNT := 10, // 读取的数量
DB_NO := 1, // 数据块号
DB_OFFS := 0, // 数据块偏移量
DATA := ReadData
);代码分析:这里先定义了 MBCLIENT 和 MBREAD 两个功能块,分别用于建立 Modbus TCP 连接和读取数据。MBCLIENT 功能块通过 CONN 信号控制连接的开启,CONNDATA 指定了服务器的 IP 地址和端口号。MB_READ 功能块通过 EXEC 信号触发读取操作,ADD 指定了起始地址,AMOUNT 指定了要读取的数量。最后读取的数据会存储在 ReadData 数组中。
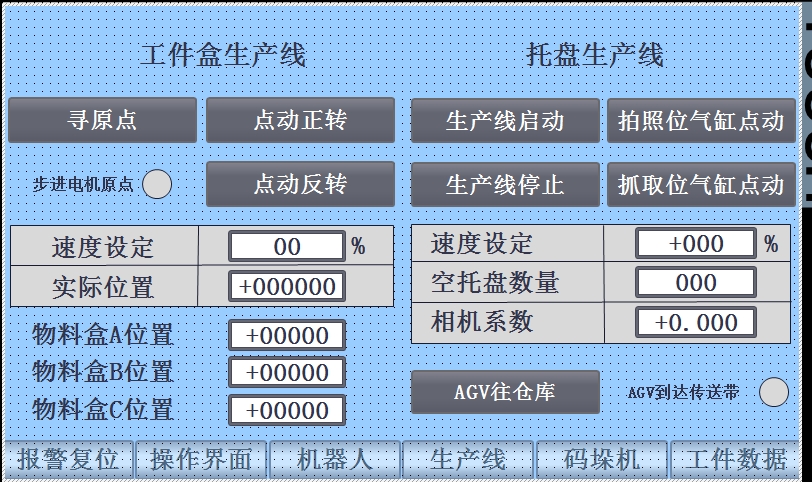
结合变频器、触摸屏、工业机器人和视觉相机
在实际的码垛机和立体库系统中,变频器用于控制电机的速度,触摸屏可以实现人机交互,工业机器人负责码垛动作,视觉相机用于定位和检测。下面是一段简单的模拟代码,展示如何结合这些设备:
// 变频器控制
VAR
FrequencySet : REAL; // 变频器频率设定值
DriveEnable : BOOL; // 变频器使能信号
END_VAR
// 根据触摸屏输入设置变频器频率
IF HMI_Frequency_Set THEN // HMI_Frequency_Set 是触摸屏上的频率设置信号
FrequencySet := HMI_Frequency_Value; // HMI_Frequency_Value 是触摸屏上输入的频率值
DriveEnable := TRUE;
END_IF;
// 工业机器人控制
VAR
RobotMove : BOOL; // 机器人移动信号
END_VAR
// 当视觉相机检测到物体时,触发机器人移动
IF Vision_Detect THEN // Vision_Detect 是视觉相机的检测信号
RobotMove := TRUE;
END_IF;代码分析:这段代码里,通过触摸屏输入的信号 HMIFrequencySet 和 HMIFrequencyValue 来设置变频器的频率和使能信号。当视觉相机检测到物体时,Vision_Detect 信号变为 TRUE,触发工业机器人移动。
总之,西门子 1200 码垛机和立体库码垛机程序是一个综合性很强的系统,涉及到多种设备的控制和通讯。通过合理的程序结构和详细的注释,我们可以更好地开发和维护这样的系统。希望今天的分享能对大家有所帮助,让我们一起在工控的世界里继续探索!

DAMO开发者矩阵,由阿里巴巴达摩院和中国互联网协会联合发起,致力于探讨最前沿的技术趋势与应用成果,搭建高质量的交流与分享平台,推动技术创新与产业应用链接,围绕“人工智能与新型计算”构建开放共享的开发者生态。
更多推荐


 10
10 0
0- 0



 已为社区贡献20条内容
已为社区贡献20条内容

所有评论(0)